

5.3. Регулювання швидкості електропривода
Використання того чи іншого способу регулювання швидкості електропривода в основному залежить від виду електродвигуна, що використовується в ньому.
5.3.1. Регулювання швидкості електропривода з асинхронним двигуном із короткозамкненим ротором
Частота обертання ротора п (об/хв) асинхронного двигуна з короткозамкненим ротором визначається за формулою:
n
= (5.3)
(5.3)
де f1 - частота напруги живлення, Гц;
р - кількість пар полюсів електродвигуна;
S - ковзання.
Згідно з виразом (5.3) швидкість асинхронного двигуна з короткозамкненим ротором можна регулювати за допомогою трьох параметрів. Відповідно існують три способи регулювання:
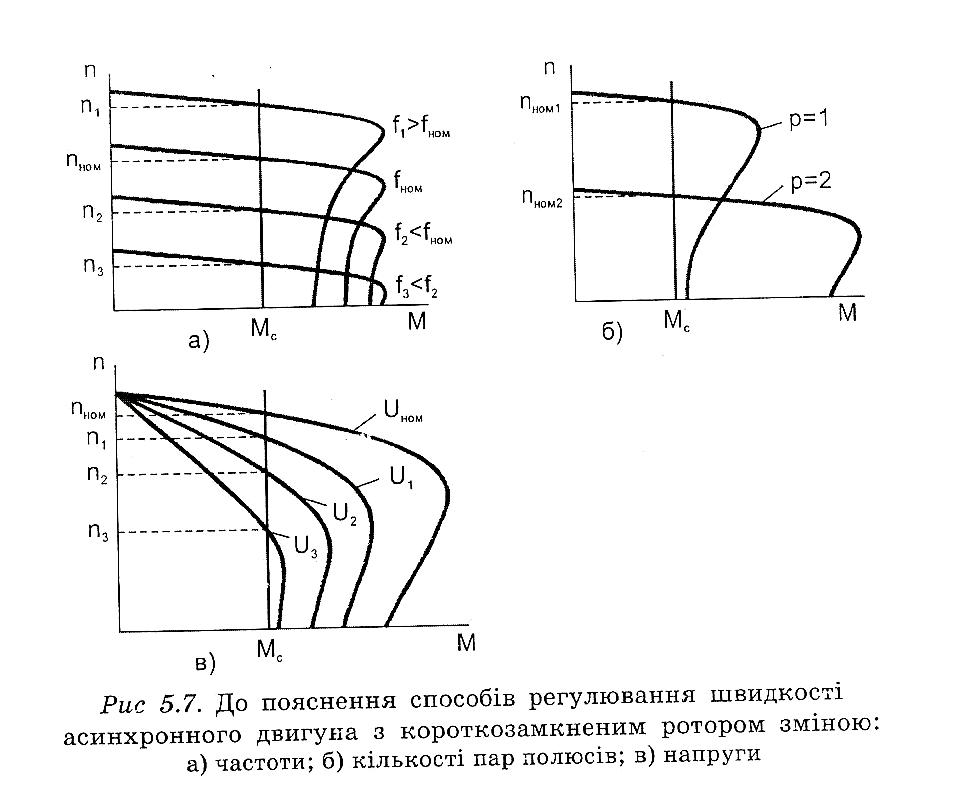
Регулювання частоти напруги живлення (f1). Як відомо, у нашій країні мережі змінного струму мають стандартну частоту fHOM= 50 Гц. Найчастіше для зміни частоти напруги живлення в електроприводах робочих машин використовують тиристорні перетворювачі частоти (ТПЧ). Вони дозволяють плавно змінювати частоту як у більшу, так і в меншу сторону від номінального значення, що зумовлює пропорційну зміну частоти обертання вала електродвигуна (рис. 5.7а). Тому можливість плавного регулювання швидкості зміною частоти теоретично від нуля до номінальної швидкості і вище є перевагою цього способу регулювання.
Але цей спосіб має також ряд істотних недоліків:
ТПЧ є досить складними пристроями, які за своїми масо- габаритними та ціновими параметрами перевищують аналогічні параметри двигуна;
асинхронний двигун із короткозамкненим ротором у комплексі «АД-ТПЧ» втрачає ряд своїх переваг, які були описані в п. 4.2.1.
Тому перед прийняттям рішення про використання такого способу регулювання швидкості доцільно виконати техніко-економічний аналіз.
2. Регулювання за допомогою зміни кількості пар полюсів (р) електродвигуна.
Промисловість випускає такі асинхронні електродвигуни серії 4А:
двошвидкісні із синхронними частотами обертання 1500/3000, 1000/1500, 750/1500, 750/1000, 500/1000 об/хв; тришвидкісні із синхронними частотами обертання 1000/1500/3000, 750/1500/3000, 750/1000/1500 об/хв; чотиришвидкісні з синхронними частотами обертання 500/750/1000/1500 об/хв.
Технічні дані деяких багатошвидкісних двигунів серії 4А наведені в додатку Г, а більш повну інформацію див. у довідниках.
Цей спосіб регулювання (рис. 5.76) дозволяє лише ступеневу зміну швидкості двигуна. Його недоліком є те, що масогабаритні та цінові параметри багатошвидкісних електродвигунів значно вищі, ніж одношвидкісних, і при їх використанні необхідні додаткові електричні апарати керування.
3. Регулювання зміною ковзання (S). Для асинхронних двигунів ковзання можна змінювати шляхом зміни напруги живлення (рис. 5.7в). Але на практиці в системах електропривода робочих машин цей спосіб використовується рідко, оскільки:
має незначний діапазон регулювання швидкості;
суттєве збільшення напруги вище номінального значення недопустиме, а зменшення напруги призводить до суттєвого зниження як перевантажувальної здатності електродвигуна, так і його пускового моменту.
Аналізуючи сказане, можна дійти висновку, що регулювання швидкості асинхронних двигунів із короткозамкненим ротором на практиці можливе, але часто воно є складним, дорогим або неефективним. Тому виконання техніко- економічних розрахунків і порівнянь з іншими можливими способами в цьому випадку обов'язкове.