

5.2. Особливості гальмування електропривода
В електроприводах робочих машин найчастіше застосовуються такі способи гальмування: на вибіг, динамічне та противмиканням.
5.2.1. Гальмування на вибіг
Для пояснення цього способу гальмування звернемось до рис. 5.2. На початку гальмування вимикають комутаційний апарат S. Припинення подачі напруги на обмотки статора двигуна М зумовлює зникнення електромагнітного обертового моменту. Гальмування електропривода відбувається під дією моменту опору, спричиненого всіма рухомими частинами електропривода та виконавчого органа робочої машини.
Перевага способу: гальмування на вибіг є найпростішим за виконанням і потребує мінімуму необхідних електричних апаратів для реалізації. Він широко використовується в тих електроприводах, де немає обмежень на час гальмування.
Недолік способу: час гальмування залежить як від початкової швидкості, за якої починається гальмування, так і від величини моменту опору, отже керувати процесом гальмування при даному способі неможливо.
Розглянемо цей режим гальмування на прикладі асинхронного двигуна з короткозамкненим ротором (рис. 5.5).
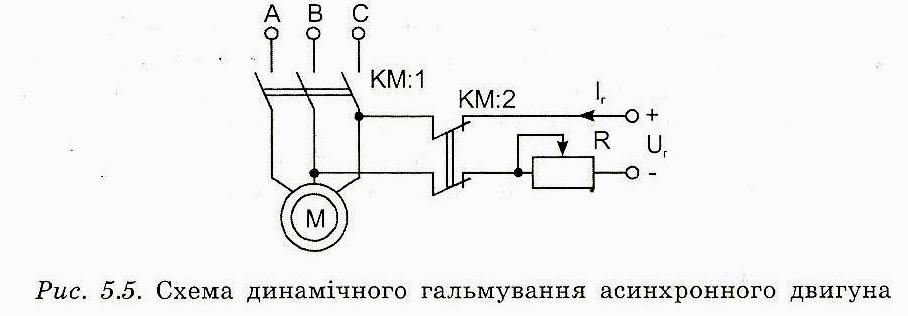
Після розімкнення силових контактів КМ:1 магнітного пускача припиняється подача трифазної напруги на обмотки статора. Одночасно з цим замикаються контакти KM:2 магнітного пускача, і дві фазні обмотки статора підключаються до джерела постійного струму U . Ротор двигуна під дією інерційних сил продовжує обертатись у постійному магнітному полі. Електрична машина переходить у режим генератора, і на її ротор починає діяти електромагнітний момент, який у даному разі виконує роль гальмівного моменту. Величина гальмівного моменту пропорційно залежить від величини струму Іг, який, у свою чергу, залежить від величини опору змінного резистора R.
Таким чином, розглянута схема дозволяє, змінюючи величину опору R, змінювати величину гальмівного моменту і тим самим змінювати час гальмування.
Перевагою цього способу гальмування є можливість плавно змінювати час гальмування незалежно від початкової швидкості і величини навантаження двигуна. До недоліків можна віднести:
необхідність мати два джерела живлення;
більшу складність, обумовлену необхідністю застосування допоміжних комутаційних електричних апаратів, налагодження схеми та певного регулювання її параметрів.
5.2.3. Гальмування противмиканням
При цьому способі гальмування (рис. 5.6) на час гальмування змінюється чергування двох фаз напруги, що подається на обмотки статора.
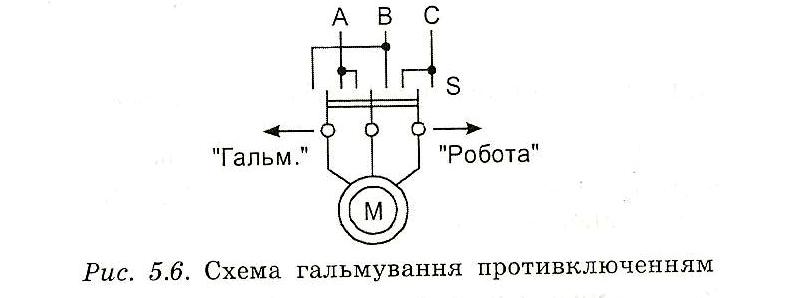
Під час роботи електропривода перемикач S знаходиться в положенні «Робота», що забезпечує чергування фаз напруги «АВС», яка подається на обмотки статора. Обертовий момент при цьому має один напрямок, скажімо, за ходом годинникової стрілки. У цьому напрямку обертається і ротор.
На час гальмування перемикач S знаходиться в положенні «Гальмування». При цьому змінюється чергування фаз напруги «ВАС», і обертовий момент змінює свій напрямок на протилежний - проти годинникової стрілки. Але оскільки ротор продовжує обертатися в тому ж напрямку, то в даному випадку обертовий момент двигуна виконує функцію гальмівного моменту, під дією якого і відбувається гальмування.
Цей спосіб гальмування значно простіший від попереднього, оскільки потребує менше допоміжних комутаційних електричних апаратів і забезпечує швидке гальмування.
Але він має і ряд суттєвих недоліків:
великі значення струму та моменту;
можливий зворотний хід двигуна, якщо своєчасно не переставити перемикач в нейтральне положення;
неможливість регулювати час гальмування.
Крім описаних способів електричного гальмування в електроприводах деяких робочих механізмів використовують також механічне гальмування. Суть його полягає в тому, що на валу електродвигуна встановлюється барабан, який після відключення електродвигуна від джерела живлення затискається колодками, чим і досягається гальмування вала двигуна та утримання його в нерухомому стані до повторного вмикання.