

5.1.4. Шляхи вирішення проблем пуску
У кожному конкретному випадку, внаслідок особливостей механічних характеристик робочого механізму і електродвигуна, існує кілька шляхів вирішення цієї проблеми. Враховуючи велику різноманітність робочих механізмів і видів електродвигунів, які використовуються в їхніх електроприводах, це питання буде розглянуто лише на прикладі асинхронних двигунів із короткозамкненим ротором.
Першим шляхом вирішення цієї проблеми в електроприводах робочих машин з великими статичними та інерційними навантаженнями на час пуску є збільшення пускового моменту асинхронного двигуна з короткозамкненим ротором. Для цього використовують асинхронні електродвигуни серії 4А з підвищеним пусковим моментом. У позначенні цих електродвигунів після серії (4А) добавляється літера Р, наприклад, 4АР16084УЗ. Ці двигуни випускаються на синхронні частоти 1500, 1000 та 750 об/хв, відповідають основному виконанню та уніфіковані з відповідними типорозмірами основного виконання за всіма елементами і головними розмірами висоти вала та кріплення. Збільшення пускового моменту та зменшення пускових струмів у цих двигунах досягається завдяки особливій конструкції ротора, який має залиту алюмінієм подвійну обмотку. Таке конструктивне рішення зумовлює певне подорожчання двигуна, але дає можливість отримати більші значення коефіцієнта пуску (kn = 1,8 2,0) та мінімального моменту (М min = (1,5 1,6) М ном ).
Другим шляхом вирішення цієї проблеми є правильний вибір способу пуску. Для електропривода робочих машин на основі асинхронного електродвигуна з короткозамкненим ротором найчастіше використовують такі види пуску:
прямий;
переключенням схеми з'єднання обмотки статора із «зірки» на «трикутник»;
за допомогою автотрансформатора.
Прямий пуск, або пуск безпосереднім вмиканням двигуна на номінальну напругу мережі живлення є найбільш поширеним способом пуску асинхронних двигунів із короткозамкненим ротором малої та середньої потужності.
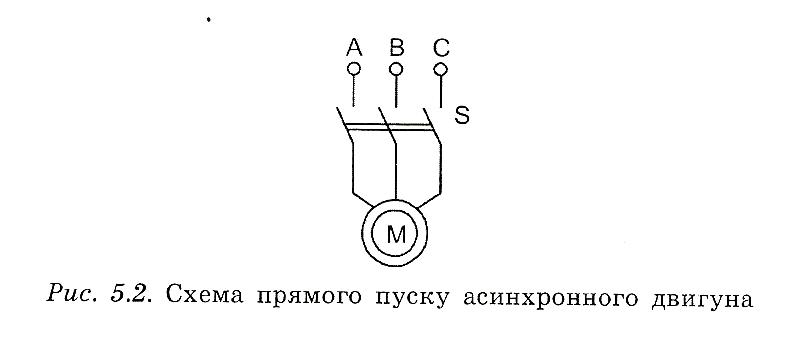
При такому способі пуску (рис. 5.2) на обмотку статора за допомогою комутаційного апарата S відразу подається номінальна напруга, за якої і відбувається запуск двигуна.
Перевагою такого способу пуску є простота його виконання та мінімум електричних апаратів, необхідних для його реалізації.
До недоліків відносять те, що пусковий струм може в
5 7 разів перевищувати номінальне значення струму, а пусковий момент може бути недостатнім.
Для зменшення величини пускових струмів використовують різні способи пуску при зниженій напрузі.
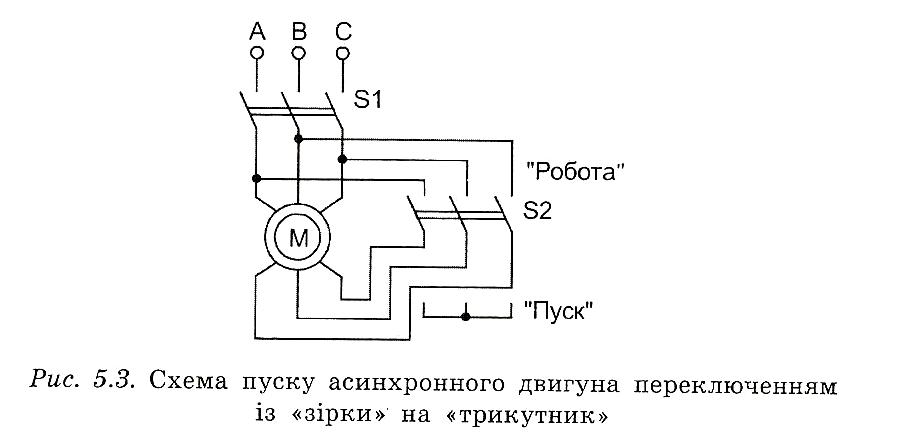
Пуск переключенням схеми з'єднання обмотки статора із «зірки» на «трикутник» (рис. 5.3) може бути використаний тоді, коли основною схемою з'єднання обмотки статора є «трикутник».
Пуск
електродвигуна відбувається в положенні
«Пуск» перемикача S2,
у
якому обмотки статора з'єднані в схему
«зірка». За такої схеми з'єднання фазні
напруга і струм будуть у
 раза
менші
за їх номінальне значення, а лінійний
струм у 3
рази
менший, ніж при схемі з'єднання
«трикутник». При досягненні двигуном
швидкості обертання ротора, близької
до номінального значення, перемикач S2
переводять
у положення «Робота», при якому обмотки
статора з'єднані в схему «трикутник».
При цьому забезпечується робота
двигуна за номінальної напруги.
раза
менші
за їх номінальне значення, а лінійний
струм у 3
рази
менший, ніж при схемі з'єднання
«трикутник». При досягненні двигуном
швидкості обертання ротора, близької
до номінального значення, перемикач S2
переводять
у положення «Робота», при якому обмотки
статора з'єднані в схему «трикутник».
При цьому забезпечується робота
двигуна за номінальної напруги.
Перевагою такого способу пуску є суттєве зниження пускових струмів. Але цей спосіб має і недоліки:
зростає складність схеми, що потребує допоміжних комутаційних електричних апаратів і виконання певних монтажних робіт, і процесу пуску;
зниження фазної напруги в раза спричинює трикратне зниження моменту, що зумовлює можливість використання такого способу пуску без навантаження або при навантаженні, значно меншому від номінального.
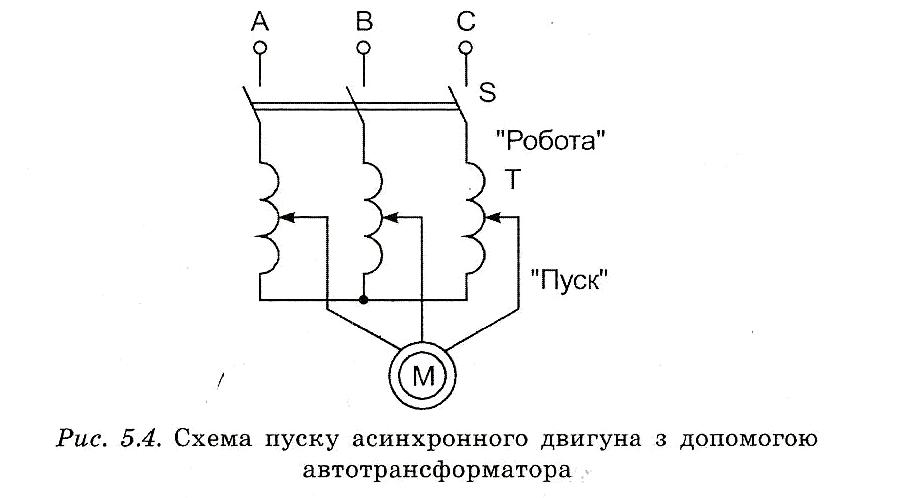
Пуск із допомогою автотрансформатора (рис. 5.4) відбувається в такій послідовності:
повзунок трифазного автотрансформатора Т переміщують в положення «Пуск»;
замикають комутаційний апарат S. Напруга, що подається на обмотки статора двигуна, у цьому положенні повзунка дорівнює нулю;
повзунок автотрансформатора плавно переміщується з положення «Пуск» у положення «Робота». При цьому також плавно змінюється напруга, що подається на обмотки статора, і двигун запускається.
Перевагами такого способу пуску є можливість змінювати величину як пускового струму, так і пускового моменту.
Але при цьому способі пуску ці параметри значною мірою залежать від правильності виконання процесу пуску оператором.
До недоліків цього способу можна віднести:
він потребує використання трифазного регульованого автотрансформатора (JIATPa), який за своїми масогабаритними та ціновими параметрами сумірний з електродвигуном;
недостатній досвід оператора або неполадки автотрансформатора можуть спричинити появу пускових струмів, сумірних із пусковими струмами при прямому пуску.