

1.4. Основи механіки електропривода
1.4.1. Приведення моментів і сил
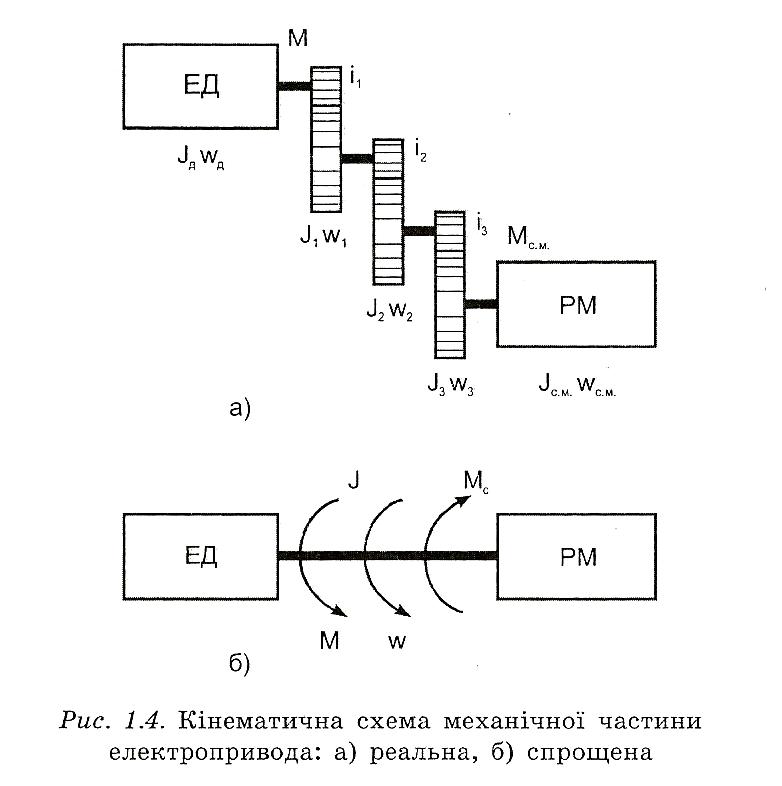
Механічна частина електропривода (рис. 1.4а) більшості робочих машин становить собою доволі складний кінематичний ланцюг з великою кількістю частин, які рухаються поступово чи обертово, мають різні швидкості, пружності, масу. У місцях з'єднання таких частин існують зазори. З урахуванням цих факторів розрахункова схема механічної частини електропривода може бути подана як багатомасова механічна система з пружними зв'язками та зазорами, динамічний розрахунок якої пов'язаний з певними труднощами.
На практиці в інженерних розрахунках буває доцільним реальну багатомасову механічну систему електропривода заміняти двомасовою системою (рис. 1.46). Та похибка, яку зумовлює таке спрощення, допустима в більшості випадків, і розбіжність у розрахунках є незначною.
Спрощення реальної механічної системи досягається шляхом приведення параметрів усіх елементів до одного з них. Найчастіше як такий елемент приймається вал електродвигуна. Тоді розрахункова схема механічної частини електропривода зводиться до однієї узагальненої жорсткої механічної ланки, яка має еквівалентну масу з моментом інерції J і на яку діють момент електродвигуна М і сумарний, приведений до вала електродвигуна статичний момент опору Мс усіх інших складових частин привода.
Приведення моментів опору від однієї осі обертання до іншої виконується на основі збереження енергетичного балансу реальної і спрощеної систем. При цьому втрату потужності в проміжних передачах враховують шляхом введення до формули відповідних коефіцієнтів корисної дії 𝜂п:
Мс
=
Мс.м. (1.1)
(1.1)
де
Мсм
-
реальний
момент опору робочої машини, Н
 м;
м;
Мс - момент опору робочої машини, приведений до швидкості обертання вала двигуна, Н м;
і - передавальні відношення.
Приведення сил опору проводитеся аналогічно до приведення моментів за формулою:
Мс
= Fcм𝜈/ (1.2)
(1.2)
де Fcм - сила опору робочої машини, Н;
𝜈 - швидкість поступального руху, м/с;
 -
кутова
швидкість вала двигуна, рад/с.
-
кутова
швидкість вала двигуна, рад/с.
Приведення моментів інерції до однієї осі обертання виконується з урахуванням того, що сумарний запас кінетичної енергії рухомих елементів привода залишається незмінним як для реальної, так і для приведеної систем. Він визначається за формулою:
J
=
 +
+
 (1.3)
(1.3)
де
 -
момент
інерції ротора двигуна та інших елементів
(муфти, шківи, шестерні та ін.), що
встановлені на ньому, кг
м2;
-
момент
інерції ротора двигуна та інших елементів
(муфти, шківи, шестерні та ін.), що
встановлені на ньому, кг
м2;
J
,
J2,...,
Jn
—
моменти
інерції інших елементів привода,
що
обертаються з кутовими швидкостями
відповідно
 ,
,
 ,...,
,...,
 .
.
Приведення мас, що рухаються поступально, до вала двигуна здійснюється також на основі незмінності кінетичної енергії. Момент інерції визначається за формулою:
J
= m(v/ 2 (1.4)
2 (1.4)
Якщо ж робочий механізм має і обертові елементи, і ті, що рухаються поступально, то сумарний приведений до вала двигуна момент інерції визначатиметься за формулою:
J
= Jd+J +J
+J
 +... + J,
+... + J,
 m
m ...
(1.5)
...
(1.5)