

Коэффициент полезного действия мпт, если ввести коэффициент нагрузки , можно представить соотношениями:
![]() :
:
 (2.7)
(2.7)
где ΣΔР - суммарные потери мощности в МПТ (Вт): электрические –ΔРе; магнитные – ΔРm; механические – ΔРM потери соответственно. Из соотношений (1.7) и графической зависимости η(β) (рис.1.3) видно, что с увеличением коэффициента нагрузки β при одинаковой номинальной мощности Рен = РН в пределах [0-1] КПД, когда потери почти постоянны и равны магнитным, ΔРm возрастает пропорционально нагрузке, а за их пределами, когда начинают сказываться сильнее переменные потери (ΔРе + ΔРМ) - падает. Его номинальное значение находится в пределах [0,85 - 0,9].
Рассмотрим лишь основные характеристики, которые необходимы как для технической эксплуатации, так и для правильного обеспечения действующих и проектируемых электрифицированных технологических процессов.
Рабочие характеристики ДПТ – это зависимости скорости вращения ω, электромагнитного вращающего момента М, тока якоря Iа и КПД η от мощности на валу - нагрузки Р со стороны рабочей машины (рис.1.4) при неизменных значениях U и IB . На рисунке представлены рабочие характеристики двигателя параллельного возбуждения. Из рисунка видно, что работа ДПТШВ с малой нагрузкой Рx не экономична.
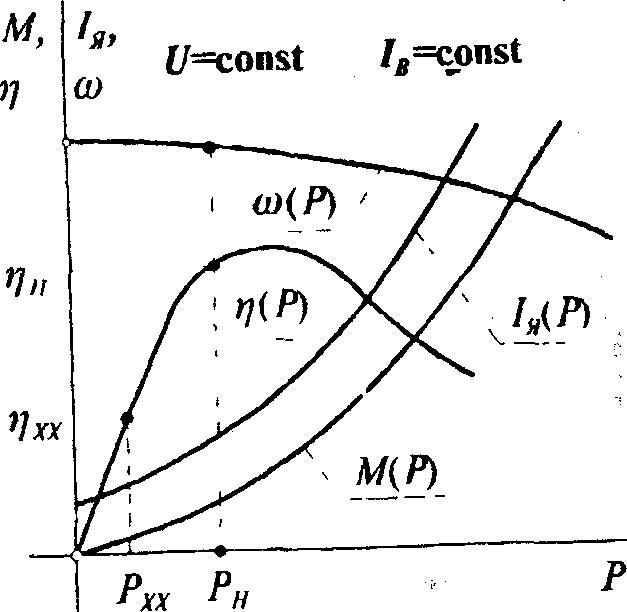
Рис.2.4 Рабочие характеристики машины постоянного тока в двигательном режиме
Механические характеристики ДПТ – это зависимости скорости вращения ω от вращающего момента электромагнитного происхождения на валу при неизменных напряжении сети U и токе возбуждения IB. Так как для ДПТ, например, параллельного (независимого) возбуждения
U = Е + RЯ • IЯ (4.9)
Е = СЕ • ω, а М = СМ • IЯ (4.10)
где : Rя – полное активное сопротивление якоря;
Се и См – конструктивные константы ДПТ
то скорость ДПТ в этом частном случае будет определяться зависимостью:
![]() (4.11)
(4.11)
где ω0 - скорость идеального холостого хода.
Из аналитической зависимости механической характеристики ω(М) (1.11) видно, что при U = const., IB = const и RЯ = const для ДПТНВ и ДТПШВ она представляет собой прямую в отрезках 1(см рис.1.5).
Она показывает три основных режима работы ДПТ: режим холостого хода - РХХ, режим номинальной работы - РНР и режим короткого замыкания - РКЗ. Эта зависимость ω(М) называется естественной механической характеристикой, если она получена при естественных условиях: U = UH, IB = IBн, RЯ = RЯ и искусственной, если получена при изменении U, СE, СM и RЯ.
Для сравнения с естественной механической характеристикой 1 на рис.1.5 показаны естественные характеристики ДПТПВ –прямая 2 и ДПТСВ – прямая 3. Видно, что ДПТПВ при холостом ходе имеет бесконечную скорость вращения, при которой якорь машины выходит из строя. Поэтому ДПТПВ можно применять в приводах таких рабочих машин и механизмов, которые запускаются под нагрузкой и нагрузка остаётся неизменной или мало изменяющейся в течении всего рабочего цикла, например, механизмы позиционирования транспортного оборудования, вентиляторы, компрессоры.

Рис.2.5 Механические характеристики двигателей постоянного тока
Аналитическое выражение механических характеристик ДПТНВ (ШВ) (1.11) показывает, что регулирование скорости при неизменной нагрузке М можно осуществлять на основе трех принципов:
за счет изменения напряжения сети U при неизменных магнитном потоке Ф и сопротивлении якоря RЯ:
![]() (2.12)
(2.12)
за счет изменения тока возбуждения IB при неизменных напряжении U и сопротивлении RЯ:
![]() (2.13)
(2.13)
за счет изменения сопротивления цепи якорной обмотки при неизменных напряжении U и магнитном потоке Ф:
![]()
![]() (2.14)
(2.14)