

1.4.2. Параллельная работа генераторов постоянного тока
На преобразовательных подстанциях постоянного тока обычно устанавливают несколько генераторов и включают их параллельно на общие шины. Суммарная мощность этих генераторов должна соответствовать мощности потребителей с учётом некоторого резерва. Установка нескольких генераторов вместо одного обеспечивает более эффективное использование агрегатов. Так, при уменьшении нагрузки часть генераторов может быть остановлена, чтобы оставшиеся генераторы работали с полной нагрузкой, а, следовательно, с более высоким КПД.
При включении генераторов на параллельную работу необходимо соблюдать следующие условия:
1) ЭДС подключаемого генератора должна быть равна напряжению сети.
2) Полярность зажимов подключаемого генератора должна соответствовать полярности сети.
При параллельной работе двух генераторов их нагрузка определяется выражениями:
I1 = (Е1-Uс)/∑r1; I2 = (Е2-Uс)/∑r2,
где I1 – ток первого генератора, Е1 – ЭДС первого генератора, ∑r1 – сопротивление цепи якоря первого генератора, I2 – ток второго генератора, Е2 – ЭДС второго генератора, ∑r2 – сопротивление цепи якоря второго генератора, Uс – напряжение сети.
Если ЭДС генераторов одинаковы, т. е. Е1=Е2, то
I1/I2 = ∑r2/∑r1.
Следовательно, нагрузка между генераторами распределяется обратно пропорционально сопротивлениям цепи якоря.
При включении на параллельную работу генераторов смешанного возбуждения следует предусмотреть в схеме уравнительный провод, соединяющий одноимённые зажимы якорной обмотки. При отсутствии уравнительного провода один из генераторов может взять на себя всю нагрузку сети, а второй при этом перейдёт в двигательный режим, что может привести к аварии. При наличии уравнительного провода последовательные обмотки генераторов оказываются соединёнными параллельно. Поэтому при увеличении тока нагрузки одного из генераторов токи в последовательных обмотках обоих генераторов увеличатся в одинаковой степени и перераспределения нагрузки между генераторами не произойдёт.
1.4.3. Коллекторные двигатели постоянного тока
Коллекторные машины постоянного тока обладают свойством обратимости, т. е. они могут работать как в режиме генератора, так ив режиме двигателя. Обмотки якоря и обмотки возбуждения у двигателей и у генераторов постоянного тока выполняют и включают аналогично. Поэтому двигатели, как и генераторы, бывают с электромагнитным возбуждением и с возбуждением от постоянных магнитов (магнитоэлектрические). Двигатели с электромагнитным возбуждением в зависимости от способа возбуждения подразделяются на двигатели независимого возбуждения, параллельного возбуждения (шунтовые), последовательного возбуждения (сериесные) и смешанного возбуждения (компаундные).
Принцип действия электродвигателя состоит в том, что на проводник стоком, внесённый в магнитное поле, действует механическая сила. Если несколько таких проводников установить на якоре, то под действием механических сил якорь начнёт вращаться, и в его обмотке будет индуцироваться ЭДС. Её направление определяется по правилу ″правой руки″. По своей природе она не отличается от ЭДС, наводимой в обмотке генератора, но в двигателе она направлена тока якоря и поэтому её называют противоэлектродвижущей силой (противо-ЭДС) якоря.
Основные характеристики двигателей постоянного тока:
1). Характеристика холостого хода (х. х.), регулировочная, - зависимость частоты вращения n двигателя от тока возбуждения Iв:
N = f(Iв) при U = const,
где U – напряжение питающей сети.
2). Рабочие характеристики – определяют эксплуатационные свойства двигателя при U = const и при Iв = const, они делятся на:
- скоростные – n = f(Р2), где - Р2 мощность на валу двигателя (полезная),
- механические – n = f(М2), где М2 - момент на валу двигателя (полезный),
- прочие – Р1 = f(Р2), I = f(Р2), Ƞ = f(Р2), М = f(Р2),
где Р1 - мощность цепи якоря, I - ток якоря, Ƞ - коэффициент полезного действия (КПД) двигателя, М – электромагнитный момент двигателя. Двигатель независимого возбуждения – это двигатель, ОВ которого подключена к вспомогательному источнику питания, а обмотка якоря к основному, т. е. его обмотки питаются из разных источников электрической энергии (рис. 13).

Рис. 13. Принципиальная схема и характеристики двигателя независимого возбуждения:
а) – принципиальная схема; б) – характеристика холостого хода (регулировочная); в) – рабочие скоростные характеристики; г) – рабочие механические характеристики; д) – прочие рабочие характеристики.
Его характеристики:
1). Характеристика х. х. (регулировочная) показывает, что при значительном уменьшении тока возбуждения (особенно при обрыве цепи возбуждения) скорость вращения и ток якоря сильно возрастают (двигатель идёт ″в разнос″). Это недопустимо, поэтому двигатель снабжают защитной автоматикой, которая отключает его при чрезмерном уменьшении тока возбуждения, если его величина становится менее 1/3 номинального.
2.) Рабочие скоростные и механические характеристики при отсутствии в цепи якоря дополнительного сопротивления называют естественными, а при его введении – искусственными:
- скоростные - показывают, что при возрастании мощности на валу двигателя частота вращения уменьшается;
- механические - показывают, что при возрастании электромагнитного момента на валу двигателя частота вращения уменьшается;
- прочие показывают, что при возрастании мощности на валу двигателя мощность цепи якоря (потребляемая), ток в цепи якоря (потребляемый) и электромагнитный момент возрастают, а КПД возрастает до определённого значения мощности, а затем медленно уменьшается.
Двигатели независимого возбуждения применяют при питании от источника с изменяющимся напряжением (генератор или управляемый выпрямитель).
Двигатель параллельного возбуждения – это двигатель, ОВ которого включена параллельно обмотке якоря и обе обмотки питаются от одного источника электроэнергии. Т. к. в цепь ОВ включают регулировочный реостат, а в цепь обмотки якоря пусковой реостат, то по существу они имеет раздельное питание и, следовательно, электродвигатель с параллельным возбуждением имеет такие же характеристики, что и двигатель с независимым возбуждением, поэтому для него также недопустимо значительное падение тока возбуждения. Двигатели параллельного возбуждения применяют при неизменном напряжении питания и там, где требуется устойчивая работа при колебаниях нагрузки (станочные приводы, вентиляторы и т. д.) (рис. 14.).
Двигатель последовательного возбуждения - это двигатель, ОВ которого включена последовательно с обмоткой якоря и обе обмотки питаются от одного источника электроэнергии. Характерной особенностью его является то, что ток возбуждения равен току якоря (рис. 15). Его характеристики:
1). Характеристика х. х. (регулировочная) аналогична характеристике х. х. двигателя независимого возбуждения и поэтому для него также недопустимо значительное падение тока возбуждения.
2.) Рабочие скоростные и механические характеристики при отсутствии в цепи якоря дополнительного сопротивления называют естественными, а при его введении – искусственными:
- скоростные - показывают, что при возрастании мощности на валу двигателя уменьшение частоты вращения носит гиперболический характер, т. е скоростные характеристики более мягкие;
- механические - показывают, что при возрастании электромагнитного момента на валу двигателя, частота вращения уменьшается по гиперболическому закону, т. е. механические характеристики более мягкие;
- прочие показывают, что при возрастании мощности на валу двигателя мощность цепи якоря (потребляемая), ток в цепи якоря (потребляемый) и электромагнитный момент возрастают по гиперболическому закону, а КПД возрастает до определённого значения мощности, а затем медленно уменьшается.

Рис. 14. Принципиальная схема и характеристики двигателя параллельного возбуждения:
а) – принципиальная схема; б) – характеристика холостого хода (регулировочная); в) – рабочие скоростные характеристики; г) – рабочие механические характеристики; д) – прочие рабочие характеристики.
Двигатели последовательного возбуждения широко применяют там, где имеет место изменение нагрузки в широких пределах и тяжёлые условия пуска и работы (электровозы, тепловозы, электропоезда и т, д.).
Двигатель смешанного возбуждения – это двигатель, у которого две обмотки возбуждения – параллельная ОВ1 и последовательная ОВ2. Это придаёт ему свойства двигателя параллельного и последовательного возбуждения (рис. 16.)
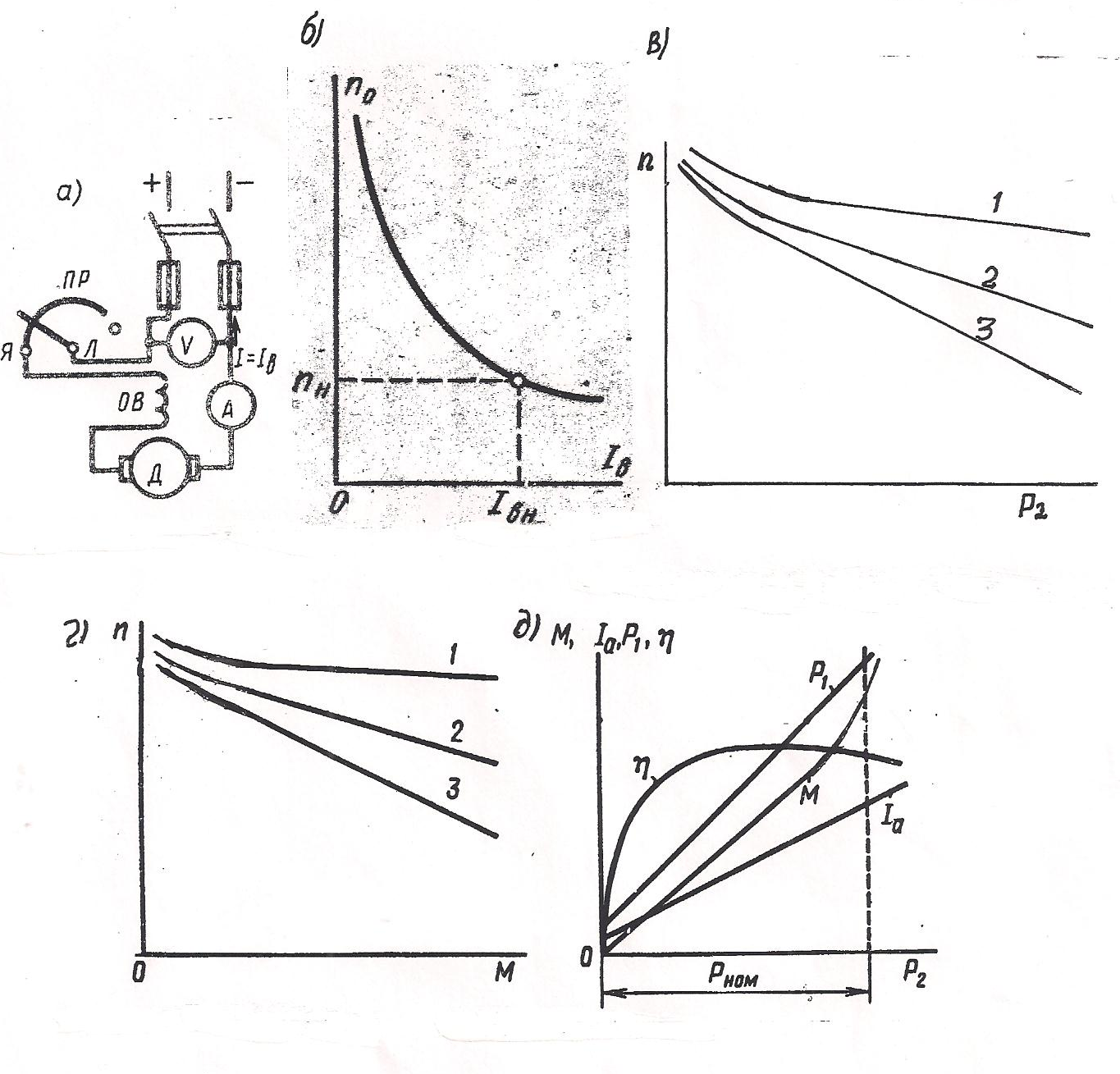
Рис. 15. Принципиальная схема и характеристики двигателя последовательного возбуждения:
а) – принципиальная схема; б) – характеристика холостого хода (регулировочная); в) – рабочие скоростные характеристики; г) – рабочие механические характеристики; д) – прочие рабочие характеристики.
1). Характеристика х. х. (регулировочная) более пологая, чем у двигателя независимого возбуждения и поэтому при значительном уменьшении тока возбуждения скорость вращения якоря возрастает незначительно, следовательно, двигатель независимого возбуждения может работать в режиме х. х.
2.) Рабочие скоростные и механические характеристики при отсутствии в цепи якоря дополнительного сопротивления называют естественными, а при его введении – искусственными:
- скоростные - показывают, что при возрастании мощности на валу двигателя уменьшение частоты вращения носит гиперболический характер, т. е скоростные характеристики более мягкие и располагаются между соответствующих характеристик двигателей параллельного и последовательного возбуждения;
- механические - показывают, что при возрастании электромагнитного момента на валу двигателя, частота вращения уменьшается по гиперболическому закону, т. е. механические характеристики более мягкие и располагаются между соответствующих характеристик двигателей параллельного и последовательного возбуждения;
- прочие показывают, что при возрастании мощности на валу двигателя мощность цепи якоря (потребляемая), ток в цепи якоря (потребляемый) и электромагнитный момент возрастают по гиперболическому закону, а КПД возрастает до определённого значения мощности, а затем медленно уменьшается.

Рис .16. Принципиальная схема и характеристики двигателя смешанного возбуждения:
а) – принципиальная схема; б) – характеристика холостого хода (регулировочная); в) – рабочие скоростные характеристики; г) – рабочие механические характеристики; д) – прочие рабочие характеристики.
Двигатели смешанного возбуждения могут работать в режиме х. х., поэтому их применяют там, где требуется устойчивая работа, быстрое ускорение и допустимо лишь небольшое снижение частоты вращения при увеличении нагрузки (прокатные станы, насосы, компрессоры, транспортёры и т. д.)