

3.3.2. Пуск и регулирование скорости вращения синхронных двигателей
Пуск синхронного двигателя непосредственным включением в сеть невозможен, т. к. ротор из-за своей значительной инерции не может быть сразу увлечён вращающимся полем статора, частота вращения которого устанавливается мгновенно. В результате устойчивая связь между статором и ротором не возникает. Для пуска синхронного двигателя приходится применять специальные способы, сущность которых состоит в предварительном приведении ротора во вращение до синхронной или близкой к ней частоте, при которой между статором и ротором устанавливается устойчивая магнитная связь.
В настоящее время практическое применение имеют два способа пуска синхронных двигателей:
Асинхронный пуск – при этом методе синхронный двигатель пускают как асинхронный, снабдив его специальной короткозамкнутой пусковой обмоткой, типа «беличье колесо» (рис. 41).
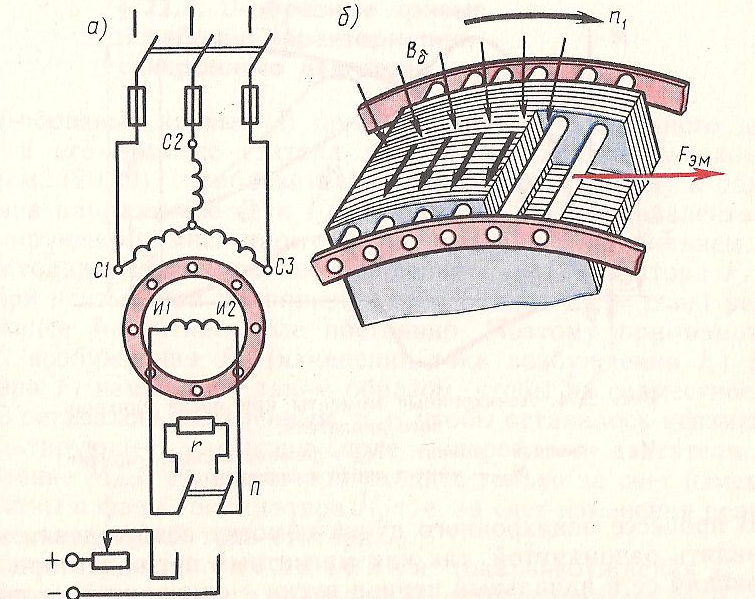
Рис. 41. Схема включения синхронного двигателя при асинхронном пуске (а) и сущность этого способа пуска (б).
Эта обмотка располагается в полюсных наконечниках ротора (аналогична демпферной обмотке синхронного генератора). Невозбуждённый синхронный двигатель включают в сеть. Возникшее при этом вращающееся магнитное поле наводит в стержнях пусковой обмотки ЭДС, которые создают токи I2. Взаимодействие этих токов с полем статора приводит ротор во вращение и разгоняет его до частоты вращения, близкой к синхронной n1 (n2 ≈ 0,95n1). Затем обмотку возбуждения подключают к источнику постоянного тока, а пусковая обмотка после этого выполняет роль демпферной обмотки. Этот способ имеет наибольшее практическое применение.
Пуск посредством вспомогательного двигателя – протекает аналогично процессу включения синхронного генератора на параллельную работу. Ротор возбуждённого двигателя приводится во вращение вспомогательным двигателем, разгоняется до синхронной частоты вращения и с помощью синхронизирующего устройства подключается к сети. Затем вспомогательный двигатель отключают. Этот способ пуска применяют в настоящее время лишь для мощных синхронных компенсаторов.
Частота вращения синхронного двигателя n2 равна частоте вращающегося магнитного поля n2 = n1 = f/p×60. Следовательно, её можно регулировать путём изменения питающего напряжения f или числа полюсов 2p. Практически используют лишь изменение частоты питающего напряжения, т. к. регулировать частоту вращения путём изменения числа полюсов приводит к значительному усложнению конструкции ротора. В чистом виде частотное регулирование частоты вращения синхронных двигателей применяют только при малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала. Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма.
3.3.3. Рабочие характеристики синхронного двигателя
Работа синхронного двигателя характеризуется рабочими характеристиками (рис. 42), которые представляют собой зависимость частоты вращения ротора n2 , потребляемой мощности P1 , полезного момента M2 , коэффициента мощности cos φ, КПД η и тока в обмотке статора I1 от полезной мощности двигателя P2 при f = const (рис. 33). Частота вращения ротора n2 всегда равна синхронной частоте n2, поэтому график n2 = f(P2) имеет вид прямой параллельной оси абсцисс. Потребляемая мощность P1 = P2 + ∑P, где ∑P - мощность потерь, поэтому с увеличением потерь она растёт быстрее полезной мощности P2 и график P1 = f(P2) имеет несколько криволинейный вид. Т. к. полезный момент M2 = P2/2πf, а рабочие характеристики снимаются при условии f = const, то график M2 = f(P2) имеет вид прямой, выходящей из начала координат. Вид графика cos φ = f(P2) зависит от вида настройки тока возбуждения. Обычно синхронные двигатели рассчитывают на работу при номинальной нагрузке с опережающим током и cos φ ≈ 0,8, что приводит к повышению номинальной мощности сети. Вид графика η = f(P2) имеет характер, общий для всех электрических машин. График I1 = f(P2) показывает, что с увеличением нагрузки навалу двигателя ток I1 растёт быстрее, чем потребляемая мощность P1.
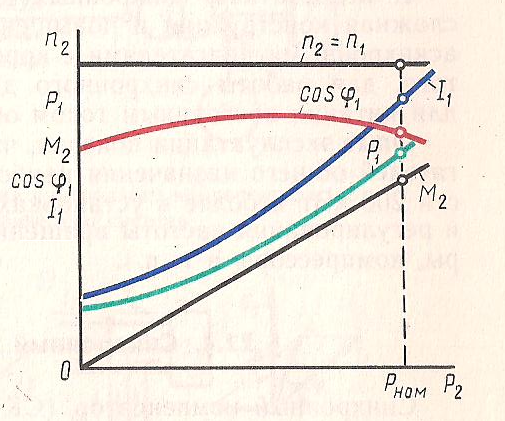
Рис. 42. Рабочие характеристики синхронного двигателя.
Достоинства синхронных двигателей:
а) возможность работы при cos φ = 1, что приводит к улучшению cos φ энергосистемы;
б) постоянство частоты вращения независимо от механической нагрузки на валу;
в) малая чувствительность к колебаниям напряжения в сети.
Недостатки синхронных двигателей:
а) сложность конструкции и высокая стоимость;
б) сравнительная сложность пуска;
в) трудности с регулированием частоты вращения.
Опыт показывает, что синхронные двигатели наиболее целесообразно применять при мощности 200 кВт и выше.