

2.2. Методика исследования нелинейных систем второго порядка методом фазовой плоскости. Примеры исследования.
Методика исследования нелинейных систем методом фазовой плоскости включает в себя следующие этапы:
Переход от исходного дифференциального уравнения второго порядка(1), описывающего динамику системы к системе двух дифференциальных уравнений первого порядка в форме Коши(2). Выделение фазовых переменных x и y, где x – отклонение выходной величины от установившегося режима (x1=x), y – скорость изменения выходной величины (x2=y).
![]() (1)
(1)
![]() (2)
(2)
Исключение времени, путем деления второго уравнения системы на первое(3).
![]() (3)
(3)
Нахождение уравнений линий переключения управляющего воздействия и выделение областей, где нелинейную систему можно рассматривать как линейную. Решение дифференциальных уравнений для каждой выделенной области.
Построение фазовых траекторий в соответствующих областях.
Анализ устойчивости и качества нелинейной системы.
Рассмотрим пример исследования методом фазовой плоскости релейной системы автоматического управления углом поворота вала двигателя. Структурная схема системы представлена на рис.15.

Рис.15. Структурная схема релейной системы
Здесь
![]() – кусочно-линейная статическая
характеристика нелинейного элемента,
– кусочно-линейная статическая
характеристика нелинейного элемента,
![]() – коэффициент усиления и постоянная
времени двигателя, Х
– угол поворота вала исполнительного
двигателя, Хз
– подлежащее отработке заданное значение
Х.
– коэффициент усиления и постоянная
времени двигателя, Х
– угол поворота вала исполнительного
двигателя, Хз
– подлежащее отработке заданное значение
Х.
1. Рассмотрим
случай, когда
![]() -
идеальное реле (рис.16а).
-
идеальное реле (рис.16а).
Представленная на рис.15 схема, описывается следующей системой уравнений:
![]() (4)
(4)
Исключив промежуточные
переменные, получим одно уравнение:
![]()
или
![]() (5)
(5)
Возьмем частный
случай
![]() ,
тогда исходя из этого
,
тогда исходя из этого
![]() .
Получим систему двух дифференциальных
уравнений первого порядка:
.
Получим систему двух дифференциальных
уравнений первого порядка:
![]() (6)
(6)
Для ![]() система (6) не изменится, если рассматривать
X
как координату отклонения от заданного
значения.
система (6) не изменится, если рассматривать
X
как координату отклонения от заданного
значения.
Для получения уравнения фазовых траекторий разделим одно уравнение на другое. Исключим время, разделив второе уравнение на первое:
![]() (7)
(7)
Согласно статической
характеристике идеального реле
может принимать только постоянные
значения
![]() .
Для каждого из этих значений
уравнение (7) является линейным и легко
решается:
.
Для каждого из этих значений
уравнение (7) является линейным и легко
решается:

Его решение имеет вид:
![]() ,
при
,
при
![]() (8)
(8)
![]() ,при
,при
![]() (9)
(9)
где постоянная
интегрирования
![]() ,
,
![]() – начальные значения фазовых переменных.
На рис.16 представлены графики фазовой
траектории и изменения управляющего
воздействия для этого случая. Линия
переключения реле совпадает с осью
координат и ее уравнение имеют вид x=0
(
– начальные значения фазовых переменных.
На рис.16 представлены графики фазовой
траектории и изменения управляющего
воздействия для этого случая. Линия
переключения реле совпадает с осью
координат и ее уравнение имеют вид x=0
(![]() ).
).
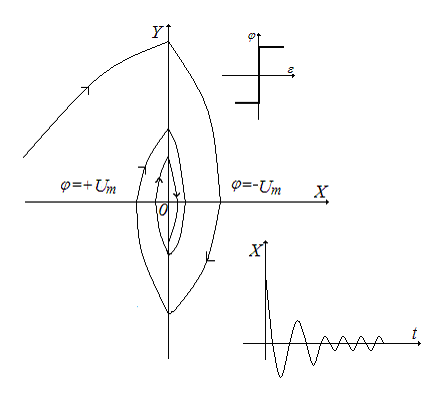
Рис.16. Вид фазовой траектории для системы с идеальным реле.
Анализируя вид фазовой траектории можно сделать вывод о том, что система не имеет установившегося значения. Имеет место режим автоколебаний. Задающее и возмущающее воздействия отрабатываются с максимальным быстродействием, так как управляющее воздействие принимает максимальные значения .
Рассмотрим случай, когда –
![]()
реле с зоной нечувствительности (рис.1с).
В данном случае
![]() кроме постоянных значений
может принимать значение равное 0.
При
кроме постоянных значений
может принимать значение равное 0.
При
![]() уравнения (7) принимает вид прямой
(движение объекта по инерции, так как
уравнения (7) принимает вид прямой
(движение объекта по инерции, так как
![]() ):
):
![]() ,
,
его решение
![]() (10)
(10)
При
![]() ,
,
,
,
следовательно уравнение линии переключения для этого случая представляет собой следующую зависимость:
![]() при
при
![]()
![]() (11)
(11)
На рис.17 представлен вид фазовой траектории. Отрезок оси абсцисс между линиями переключения представляет собой особый отрезок, определяющий зону движения системы по инерции из-за нечувствительности реле.
Если ширина зоны нечувствительности реле достаточно большая, то система (объект) может “застрять” в этой зоне, как показано на рис.17.
Если уменьшить зону нечувствительности реле, например, с целью уменьшения установившейся ошибки, то система перейдет в режим автоколебаний, так как они будут “проскакивать” зону нечувствительности.
Система с таким фазовым портретом устойчива в целом, но неасимптотически из-за наличия зоны нечувствительности реле. Она имеет установившуюся ошибку, максимальное значение которой, определяется зоной нечувствительности реле.
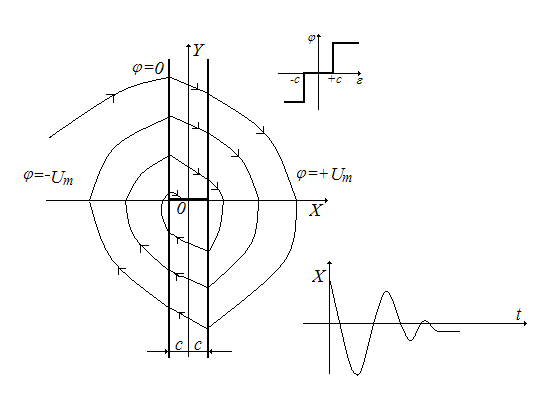
Рис.17. Вид фазовой траектории для системы, имеющей
реле с зоной нечувствительности.
Для реле с гистерезисом (рис.1в)
![]()
уравнение линий переключения будет
![]() (12)
(12)
Фазовый портрет такой системы представлен на рис.18. Здесь присутствует устойчивый предельный цикл, что говорит о неустойчивости системы в малом.
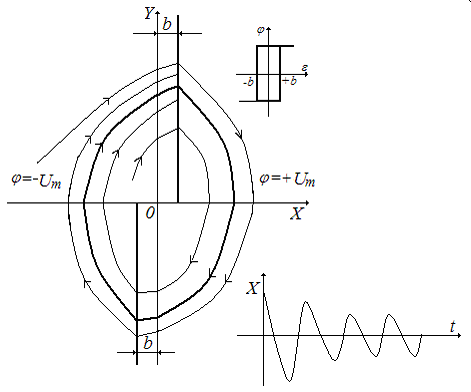
Рис.18. Вид фазовой траектории для системы, имеющей
реле с гистерезисом