

Особенности нелинейных систем автоматического управления
Нелинейной считается система, содержащая хотя бы одно нелинейное звено, то есть звено, описываемое нелинейным уравнением. Все реальные САУ в той или иной степени нелинейны, но часто существует возможность свести задачу к исследованию линейной модели реальной системы путем линеаризации последней. Процесс линеаризации невозможен в том случае, когда в системе присутствуют звенья с существенно нелинейными характеристиками.
Все реальные объекты и системы нелинейны.
Линейной называется такая САУ, которая описывается линейными дифференциальными уравнениями.








Е1 R2 E2
R1
I=![]() ; I=
; I=![]() *U;
*U;
![]() +
+![]() - принцип суперпозиции в случае
линейности.
- принцип суперпозиции в случае
линейности.
Нелинейные объекты и системы – это те, у которых хотя бы один элемент нелинеен.
P =
=![]() =
=![]() Kоб=(
Kоб=(![]() )
при I=I10
)
при I=I10
Пример линеаризуемой (слабой) нелинейности.
Такая нелинейность присуща всем реальным объектам.
При К=Кmin определяют точность, при К=Kmax определяют устойчивость.
Но существуют такие нелинейности, которые нельзя линеаризовать (существенные).
Примеры:
1. Релейные элементы
u=sign εumax ,т.е.
u
Umax![]() 0
0
u=-umax
, при ε
![]() 0
0
ε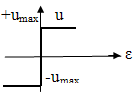 с
симметр.
хар-кой
с
симметр.
хар-кой
 с
несимметр. хар-кой
с
несимметр. хар-кой
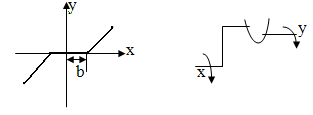
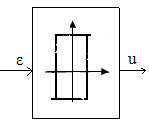
2. Люфт:
3. Гистерезис (неоднозначные нелинейные звенья):
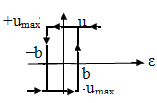 u=umax
при ε≥b,
если ε≥0
u=umax
при ε≥b,
если ε≥0
 u=-umax
при ε
u=-umax
при ε![]() b,
если ε
0
b,
если ε
0
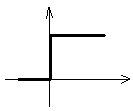
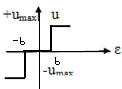
4. Релейный элемент с зоной нечувствительности:
u=umax при ε≥b
u=0
при -b
ε![]() b
b
u=-umax при ε -b
Статические характеристики и математическое описание релейных элементов
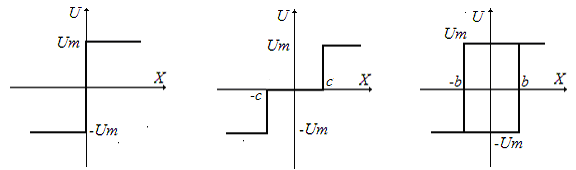
Рис. 1. Статические характеристики релейных элементов
а – идеальное реле;
б – реле с зоной нечувствительности;
в – реле с гистерезисом.
Выходной управляющий сигнал принимает следующие значения:
![]() – для идеального
реле
– для идеального
реле
![]() – для реле с
зоной нечувствительности
– для реле с
зоной нечувствительности
![]() – для реле с
гистерезисом
– для реле с
гистерезисом
Нелинейные системы подразделяются на два класса. К нелинейным системам первого класса относят такие, которые с помощью структурных преобразований можно привести к виду (рис.2):
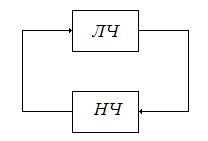
Рис.2. Нелинейные системы I класса
Системы, где подобное преобразование невозможно относят ко второму классу (рис.3). Они требуют использования более сложных с математической точки зрения методов исследования.
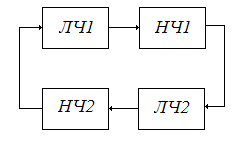
Рис.3. Нелинейные системы II класса
Методы исследования устойчивости нелинейных САУ
В линейной системе устойчивость обеспечивается тем, что в характеристическом уравнении замкнутой системы регулирования все корни имеют отрицательную вещественную часть, то есть лежат в левой полуплоскости.

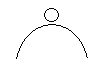
Нелинейные системы имеют большое количество устойчивых, неустойчивых, полуустойчивых состояний.
абсолютно устойчивая система

неустойчивая в большом и устойчивая в малом система (т.е. устойчива при малом отклонении и неустойчива при большом)
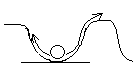
абсолютно неустойчивая система
Устойчивость и качество переходных процессов зависят от величины и вида внешнего воздействия
В линейных системах, где соблюдается принцип суперпозиции, устойчивость САУ не зависит от внешних воздействий и определяется параметрами только самой системы (рис. 4).
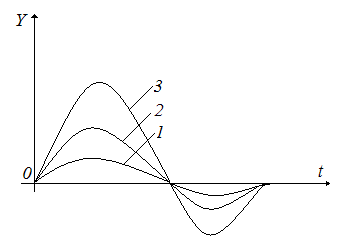
Рис.4. Переходные процессы в линейной системе
Колебательность и длительность переходного процесса не изменяются.
Период колебаний процесса в нелинейной системе не постоянен и изменяется по мере изменения отклонения (рис. 5).
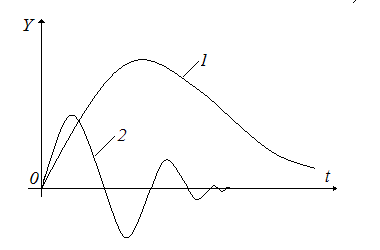
Рис.5. Переходные процессы в нелинейной системе
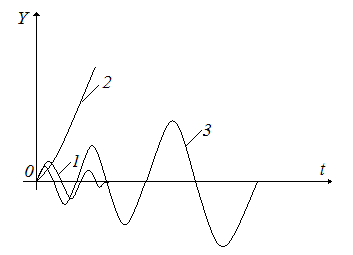
Кроме того, устойчивая при одних значениях внешних воздействий, нелинейная система может оказаться неустойчивой с возникновением расходящегося переходного процесса при других значениях этого воздействия или при других внешних воздействиях (рис. 6).
Для нелинейных систем характерен новый вид установившегося режима – режим автоколебаний
В линейных системах собственные незатухающие колебания возникают при нахождении системы на границе устойчивости. Их амплитуда пропорциональна величине внешнего воздействия. При этом, такая линейная САУ является неработоспособной. Появление автоколебаний в нелинейной системе еще не означает, что она не пригодна к эксплуатации. Этот случай проиллюстрирован на рис.7.
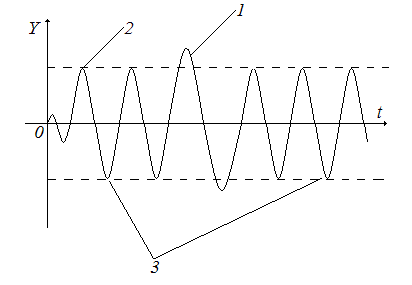
Рис.7. Режим автоколебаний
В области параметров можно выделить подобласти с многочастотными и одночастотными колебаниями.
Этот факт показан на рис.8..
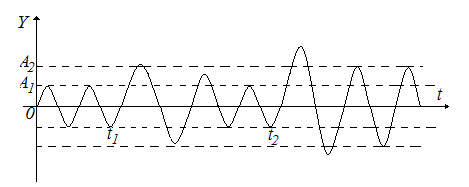
Рис.8. Автоколебания с различной амплитудой.
Таким образом, при рассмотрении вопроса устойчивости нелинейных систем необходимо оговаривать начальные условия и внешние воздействия. В отношении нелинейных систем нельзя говорить об устойчивости системы вообще, а только об устойчивости определенного динамического режима с жестко заданными параметрами.
При изучении нелинейных систем используют три понятия устойчивости.
Устойчивость в малом – это устойчивость при бесконечно малых отклонениях от исходного режима.
Устойчивость в большом – это устойчивость при конечных отклонениях, возможных в данной системе по условиям ее работы.
Устойчивость в целом – это устойчивость при неограниченных отклонениях, то есть при отсутствии каких-либо ограничений на них.
Нелинейная системах может быть устойчива в малом, но неустойчива в большом.