

Лекція 4
1.2.4 Основна і додаткова похибки.
1.2.5 Динамічні похибки вимірювання
1.2.6 Підвищення точності засобів вимірювання
1.2.7 Класи точності та позначення вимірювальних приладів.
1.2.4 Основна і додаткова похибки.
Похибки вимірювань залежать від умов, за яких виконується вимірювання. НорРисьні умови вимірювання визначаються тим, що чинники, які впливають на результат вимірювання, наприклад тиск, температура, вологість повітря та інші, знаходяться в певних межах (температура 20±5°С), що регламентується відповідними документами.
Основною похибкою називається похибка таких вимірювань, що проводяться за норРисьних умов. Коли умови виходять за межі норРисьних, то внаслідок впливу негативних чинників на процес вимірювання з’являться додаткова похибка.
Зміст
1.2.5 Динамічні похибки вимірювання
Вимірювальні перетворювачі і засоби вимірювання в цілому можуть працювати у статичному і динамічному режимах. У природі всі величини змінюються з тією чи іншою швидкістю, реальні вимірювальні пристрої внаслідок інерції також не миттєво реагують на вхідні сигнали, тому статичним режимом реального вимірювального пристрою слід вважати такий режим, коли інерційними властивостями пристроїв можна знехтувати порівняно зі швидкістю зміни вхідного вимірюваного сигналу. Отже, статичним режимом є режим вимірювання сталої величини. Насправді ж стала величина це тільки зручна математична модель, яка застосовується для теоретичного аналізу.
Динамічним режимом роботи засобу вимірювання вважається режим роботи, в якому динамічні характеристики пристроїв, зумовлені інерційністю, істотно впливають на результат вимірювання.
Динамічними характеристиками вимірювальних пристроїв вважаються характеристики, які визначають здатність пристрою швидко реагувати на вхідний вимірюваний сигнал і залежать від інерційних властивостей пристрою. Широко застосовуються такі
динамічні характеристики: перехідна, імпульсна, амплітудно-частотна та фазочастотна.
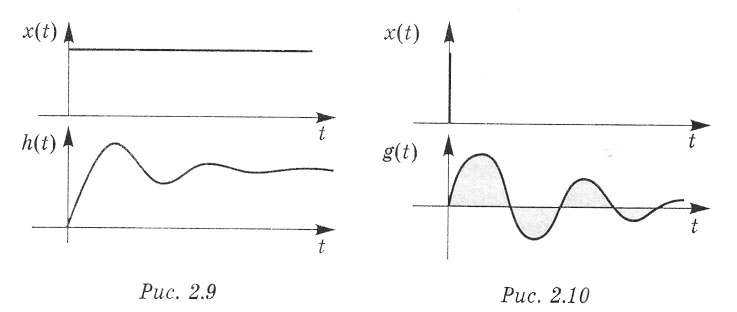
Перехідною характеристикою вимірювального перетворювача або вимірювального пристрою в цілому називається реакція, тобто вихідний сигнал перетворювача, якщо на його вході діє ступінчастий сигнал одиничної амплітуди (рис. 2.9).
Імпульсною перехідною характеристикою (g(t)) називається реакція пристрою на вхідний сигнал у вигляді дуже короткого імпульсу (рис. 2.10).
Амплітудно-частотною характеристикою (К(ω)) пристрою називається залежність від частоти відношення амплітуди вихідного синусоїдного сигналу до амплітуди вхідного синусоїдного сигналу (рис. 2.11):
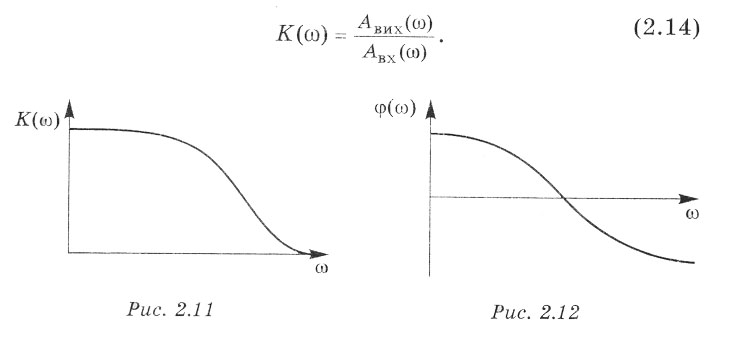
Фазочастотною характеристикою (ϕ (ω)) пристрою є
залежність від частоти різниці фаз вихідного і вхідного синусоїдного сигналів (рис. 2.12):
![]() (2.15)
(2.15)
Різниця між похибкою у динамічному режимі, тобто в режимі вимірювання змінної в часі величини, і статичною похибкою, яка відповідає значенню вимірюваної величини в даний момент часу, називається динамічною похибкою. Динамічна похибка зумовлена інерційністю засобів вимірювання під час дії на них змінних у часі величин.
![]()
Зміст