

Підготовка до включення
I. Встановіть органи керування на передній панелі в наступні положення:
-
ручку![]() - в крайнє ліве;
- в крайнє ліве;
-
ручку
![]() -
в середнє;
-
в середнє;
- перемикач «V / ДЕЛ.,» - «0,02»;
-
ручку
![]()
-
ручки
![]() - в середнє;
- в середнє;
-
тумблер
![]()
-
перемикач режиму роботи
![]()
-
перемикач полярності
![]()
- перемикач «ЧАС / ДЕЛ.» - «1 mS»;
- тумблер «АВТ., ЖДУЧ.» - «АВТ.»;
- перемикач виду синхронізації-«ВНУТР, I, II»;
- ручку «РІВЕНЬ» - в крайнє праве;.
-
ручку
![]() - в середнє, «XI»;
- в середнє, «XI»;
-
перемикач виду зв'язку
![]()
2. Переконайтеся в наявності запобіжників на задній стінці осцилографа і в їх відповідності струму.
3.Встановіть
тумблер
![]() в
- положення
в
- положення
![]() якщо
осцилограф живиться від мережі змінної
напруги і в положення
якщо
осцилограф живиться від мережі змінної
напруги і в положення
![]() якщо осцилограф живиться від джерела
постійного струму.
якщо осцилограф живиться від джерела
постійного струму.
4.
Тумблер
![]() переведіть на відповідну напруга мережі
змінного струму. При живленні осцилографа
від джерела постійної напруги положення
тумблера
переведіть на відповідну напруга мережі
змінного струму. При живленні осцилографа
від джерела постійної напруги положення
тумблера
![]() довільне.
довільне.
Вимірювання
за допомогою осцилографа
Осцилограф
- багатофункціональний прилад, він
використовується для спостереження і
вимірювання форми сигналів, про які
йшла мова в попередніх розділах. Вище
було зазначено, що сучасні осцилографи
часто застосовуються разом з іншими
приладами, наприклад з лічильниками,
для проведення комплексних вимірів
сигналу. У
цьому розділі ми розглянемо застосування
осцилографа для вимірювань часу, частоти
і фазового зсуву.
Вимірювання
часу. Час
між двома точками сигналу можна визначити
за кількістю міток на горизонтальній
шкалі при встановленні основної швидкості
розгортки осцілло ¬ графа. При
цьому методі вимірювань точність не
перевищує 5%. Більш
точний метод вимірювання часу між двома
точками сигналу - використання регульованої
тимчасової затримки. Ручка
управління має десять каліброваних
положень, так що затримка може бути
встановлена точно.
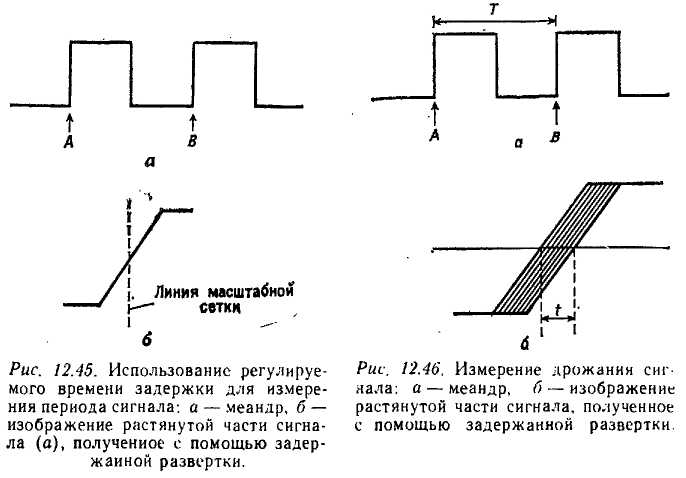
На
рис. 12.45
показано, як установку часу затримки
можна використовувати для вимірювання
періоду прямокутного сигналу. Основна
швидкість розгортки встановлюється на
відповідне значення, наприклад S мкс на
поділ, для програвання ¬ дення всього
сигналу (рис. 12.45, а). Потім
за допомогою ручки управління швидкістю
розгортки розтягують передній фронт
А. На осцилографі в режимі поперемінного
доступу відтворюється розтягнутий
фронт імпульсу, і затримка розгортки
регулюється так, щоб середина фронту
потрапила на відповідну вертикальну
лінію масштабної сітки, наприклад на
центральну (рис. 12.45,6) . Положення
Т на шкалі затримки фіксується. Тепер
затримку встановлюють так, щоб у режимі
поперемінного доступу розтягнутий
фронт У відтворювався на екрані з
середньою точкою на тій же лінії
масштабної сітки. Положення
Т2 на шкалі затримки також фіксують. Тепер
обчислюють період хвилі за формулою ![]()
Аналогічним шляхом можна виміряти тремтіння тривалості імпульсу (рис. 12.46). Період імпульсу, як зазначено вище, а невизначеність, або тремтіння, періоду визначається потім за допомогою вимірювання часу / на фронті А, як показано на рис. 12.46, б. Тремтіння у відсотках розраховується за формулою
![]()
Час наростання імпульсу визначають шляхом вимірювання часу між рівнями 10 і 90% амплітуди, використовуючи затримку розгортки. Поправку на кінцевий час наростання осцилографа можна ввести за допомогою виразу (12.11).
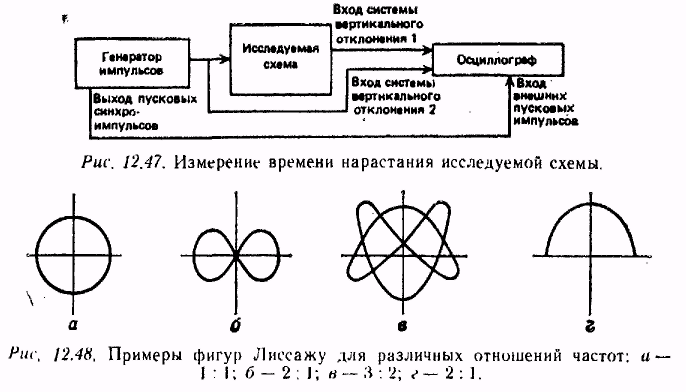
Якщо
вимірюється час наростання схеми, можна
використовувати пристрій, блок-схема
якого наведена на рис. 12.47. Вихідний
сигнал імпульсного генератора подається
безпосередньо ¬ но на один з входів
системи вертикального відхилення
осцилографа, а через досліджувану схему
- до іншого її входу. Таким
чином можна виміряти часи наростання
у двох зазначених каналах осцилографа. Однак
тепер необхідна корекція, яка враховує
кінцевий час наростання імпульсного
генератора і осцилографа. Якщо-час
наростання імпульсного генератора,-час
наростання осцилографа, - час наростання
досліджуваної схеми, виміряний за
допомогою осцилографа, тоді дійсне або
істинне наростання схеми визначається
ио формулою
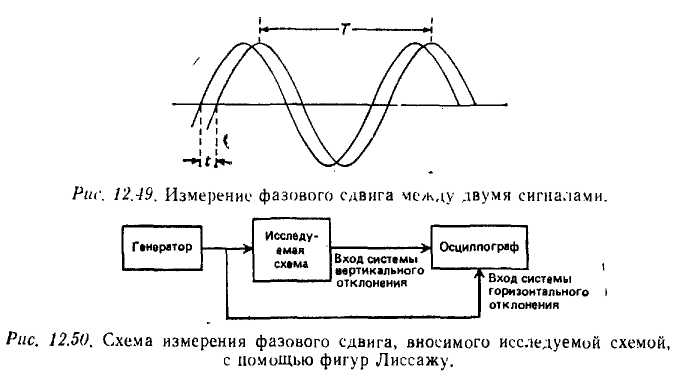
![]() Вимірювання частоти. Період
хвилі можна виміряти, як описано в
розд.12.11.1, і частота знаходиться як
величина, зворотна періоду. Інший
метод вимірювання частоти синусоїдального
сигналу заснований на використанні
фігур Ліссажу. При
цьому невідома частота порівнюється з
точно відомою частотою, а фігури Ліссажу
використовуються для визначення
відносини між двома частотами.
Вимірювання частоти. Період
хвилі можна виміряти, як описано в
розд.12.11.1, і частота знаходиться як
величина, зворотна періоду. Інший
метод вимірювання частоти синусоїдального
сигналу заснований на використанні
фігур Ліссажу. При
цьому невідома частота порівнюється з
точно відомою частотою, а фігури Ліссажу
використовуються для визначення
відносини між двома частотами.
Для отримання фігури Ліссажу сигнал невідомої частоти подається на вертикальний вхід осцилографа. Внутрішня розгортка осцилографа відключається і вихід від вимірювального генератора високої точності приєднується до входу системи горизонтального відхилення. Чутливості обох входів регулюють так, щоб відтворювана ня екрані картина заповнювала весь екран. Частота вимірювального генератора потім підбирається так, щоб на екрані осцилографа вийшло стаціонарне зображення. Це відбувається при фіксованому целочисленном відношенні між частотами двох вхідних сигналів. Воно знаходиться як відношення числа точок перетину фігури на екрані з горизонтальною і вертикальною опорними лініями. Інакше кажучи, це відношення числа торкань фігури з накладеними иа екран горизонтальною і вертикальною осями. На рис. 12.48 показані деякі приклади фігур Ліссажу. Якщо дві частоти рівні і сигнали зсунуті по фазі на 90 °. то на екрані виходить коло, як на рис.12.48, о. Тут невідома частота дорівнює частоті вимірювального генератора, яка може бути відома з точністю 0,001%. Отримане зображення залежить від ставлення частої і флзови.х співвідношень двох вхідних сигналів, але в будь-якому випадку виконується умова Фігура, показана на рис. 12.48, г, називається подвійним зображенням і виходить, коли сигнал високої частоти випереджає по фазі на 90 ° сигнал низької частоти. Електронний пучок після досягнення кінця траєкторії змінює свій напрямок і повертається до початку. Щоб застосувати співвідношення (12.17) до цієї фігури, торкання з горизонтальною віссю повинно відбуватися на відкритих її кінцях.
12.11.3. Фазові вимірювання. Фазовий зсув між двома сигналами можна виміряти, отримавши зображення цих сигналів на екрані осцилографа, що працює в режимі поперемінного доступу, при швидкості розгортки, яка забезпечує зручне вимірювання значень Т.
Інший метод вимірювання зсуву фаз грунтується на використанні фігур Ліссажу (рис. 12.50). При рівних амплітудах і частотах сигналів на двох входах зміна фазового зсуву від 0 ° до 180 ° призводить до зміни форми фігури Ліссажу від прямої лінії через еліпс до кола, як показано на рис.12.51. Пряма лінія виходить, коли різниця фаз становить 0 або 180 °. Якщо амплітуди рівні, кут цієї прямої з горизонтальною віссю становить 45 °.Лінія повертається в ту сторону, де більше напруження; наприклад, якщо напруга на вході системи горизонтального відхилення вище, ніж на вході системи вертикального відхилення, то кут з горизонтальною віссю буде менше 45 °. Кут нахилу 6 визначається виразом
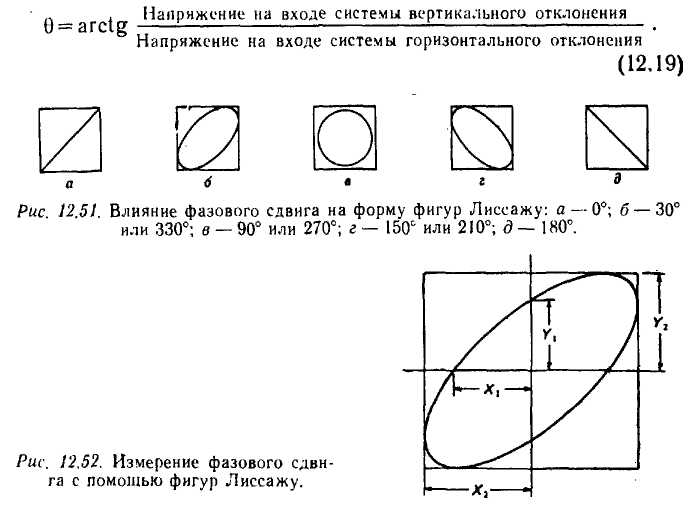
Окружність виходить при фазовому зсуві 90 або 270 °, коли амплітуди обох вхідних сигналів рівні. Якщо вони не рівні, то виходить еліпс з вертикальною або горизонтальною глав ¬ ної віссю в залежності від того, який сигнал - вертикальний або горизонтальний - має велику амплітуду. Фазовий кут між двома сигналами можна визначити по еліпсу, як показано на рис. 12.52. Коефіцієнти підсилення підсилювачів вертикального і горизонтального відхилення зазвичай підбирають так, щоб еліпс вписався в квадрат. Значення фазового кута знаходиться як відношення параметрів еліпса за формулою
