

1.1.3 Завади, шуми, наводки в каналах вимірювальних пристроїв
Крім сигналів вимірювальної інформації, в каналах вимірювальних пристроїв діють сигнали, які не несуть вимірювальної інформації і, отже, обмежують точність вимірювання. Такі паразитні сигнали називаються завадами. Цей термін вперше почав застосовуватися в радіотехніці і позначав сторонні сигнали, які заважали прийому корисних сигналів. Згодом цей термін поширився і на інші галузі техніки, у тому числі і на вимірювальну техніку.
Електричні коливання, миттєві значення яких змінюються хаотично, нерегулярно, непередбачуваним чином і мають широкий спектр, називаються шумами. Цей термін також вперше з'явився в радіотехніці і означав спочатку хаотичні електричні коливання у звуковому діапазоні частот, які, діючи на навушники телефонів чи гучномовці, створювали звук, схожий на шум моря чи вітру. У подальшому цей термін узагальнили, і шумом почали називати хаотичні коливання з широким спектром не тільки у звуковому, а й у будь-якому діапазоні частот. Широко застосовується цей термін й у вимірювальній техніці. Шум, спектр якого рівномірний в нескінченно широкій смузі частот від нуля до нескінченності, називається білим шумом. Білий шум - це лише зручна математична модель для аналізу. Реальні сигнали можуть лише наближатися до цієї моделі.
За місцем виникнення завади поділяються на внутрішні, які виникають в каналах вимірювальних пристроїв, і зовнішні, що виникають за межами вимірювальних пристроїв.
Одним з найпоширеніших внутрішніх шумів є шум, спричинений тепловим хаотичним рухом вільних електронів в матеріалі резистора, внаслідок чого напруга на резисторі має хаотичні випадкові коливання (так звані флуктуації) навколо середнього значення. Середнє квадратичне значення шумової напруги визначається формулою Найквіста, яка отримана на основі законів термодинаміки:
![]() (1.2)
(1.2)
де k=1,38•10-23 Вт/(Гц•К) - стала Больцмана; Т- термодинамічна температура, K; R- опір резистора, Ом; f-смуга частот коливань, Гц. Тепловий шум резистора має рівномірний спектр в дуже широкій смузі частот.
Транзистор має тепловий, дробовий та флікерний шуми.
Тепловий шум зумовлений хаотичним рухом носіїв заряду (електронів та дірок). Цей струм має таке саме походження, як і шум резистора, тому середнє квадратичне значення напруги теплового шуму транзистора оцінюється також за формулою (1.2) Найквіста.
Дробовий шум виникає в р-п переходах біполярного транзистора і зумовлений дискретною структурою струму через р-п переходи і нерівномірністю розподілу швидкостей руху носіїв заряду у спільному потоці. Дробовий шум характеризується середнім квадратичним значенням, яке визначається за формулою
![]() (1.3)
(1.3)
де q- заряд носія; І- струм через перехід; ∆f - смуга частот. На електричних еквівалентних схемах дробовий шум моделюється генератором струму.
У діапазоні нижніх частот переважають так звані шуми мерехтіння, або флікер-шуми, що виникають унаслідок рекомбінації носіїв заряду у поверхневому шарі напівпровідника. Інтенсивність поверхневих флікер-шумів змінюється обернено пропорційно частоті.
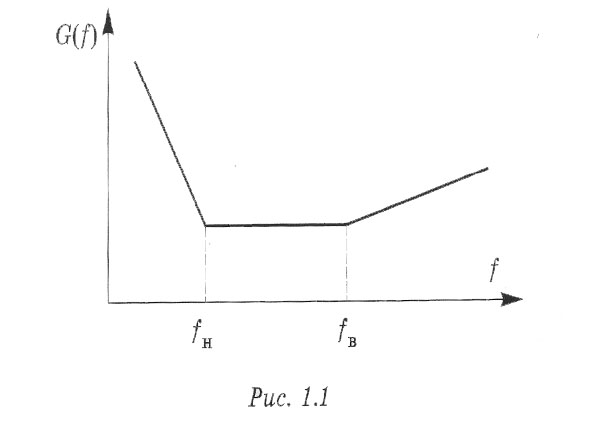
На рисунку 1.1 наведено спектр шуму транзистора у
логарифмічному масштабі.
У діапазоні нижніх частот до частоти fн переважає флікер-шуми. Для середніх частот шум визначається тепловою і дробовою складовими. У діапазоні верхніх частот рівень шуму зростає, що зумовлено зменшенням коефіцієнта підсилення транзистора на верхніх частотах.
До внутрішніх належать також шуми, спричинені неякісними контактами, а також термоерс, що виникають у місцях контакту двох провідників з різного матеріалу.
Канали обробки і передачі вимірювальної інформації через взаємні індуктивні і ємнісні зв'язки впливають один на одного, чим створюють взаємні завади один одному. Частину сигналу одного каналу, яка через взаємні індуктивні і ємнісні зв'язки проникне у розміщений поблизу сусідній канал, часто називають наводкою. Особливо велику за інтенсивністю наводку створюють електричні кола живлення на високочутливі вхідні пристрої вимірювальних приладів.
Зовнішні завади поділяються на промислові, атмосферні і космічного походження.
Промислові - створюються в результаті дії електромагнітних полів різник електротехнічних пристроїв: ліній електропередач, трансформаторних підстанцій, електроустаткування промислових підприємств, контактних мереж електротранспорту.
До атмосферних належать завади, спричинені різними атмосферними явищами: грозовими розрядами, магнітними бурями, північним сяйвом.
Космічні - спричинені електромагнітним випромінюванням Сонця, видимих і невидимих зірок та інших космічних об’єктів.
За характером дії на вхід вимірювального пристрою завади поділяються на синфазні, або поздовжні, і диференціальні, або поперечні.
Синфазні завади називаються також завадами загального виду, а диференціальні - завадами норРисьного
видy.
Поперечні завади діють як і вимірювальний сигнал між вхідними полюсами вимірювального пристрою, а поздовжні - між точкою заземлення і вхідними полюсами вимірювального пристрою.
Для оцінювання дії завад, шумів і наводок на вимірювальні пристрої застосовуються такі характеристики.
Відношення сигнал/шум (в англомовній літературі
sigal noise ratio - SNR) визначається як відношення
потужності сигналу Рs до потужності шуму PN:
![]() (1.4)
(1.4)
Часто відношення сигнал/шум виражають у логарифмічних одиницях - децибелах (дБ) або непарах (Нп):
![]()
![]() (1.5)
(1.5)
Вхідний сигнал вимірювального перетворювача або вимірювального пристрою в цілому для якого відношення сигнал/шум дорівнює одиниці, називається порогом чутливості.
Для характеристики впливу шум на вимірювальний перетворювач застосовується коефіцієнт шуму (F), який визначається як відношення сигнал/шум на вході
(Ps/PN)вх до відношення сигнал/шум (РS/РN)вих на виході
вимірювального перетворювача :
![]() (1.6)
(1.6)
Часто коефіцієнт шуму, як і відношення сигнал/шум виражають у логарифмічних одиницях:
![]()
![]() (1.7)
(1.7)
Зміст