

5.15(1) Висоти чого визначають при виході комунікації на поверхню в колодязях?
Висотне положення виходів комунікацій на поверхню та елементів забудови визначається геометричним або тригонометричним нівелюванням. При цьому нівелюють: обідок колодязя і рівень землі коло нього, верх труби (каналу, кабеля), низ труби або каналу, дно колодязя або лоток.
5.16(2) В якій точці і чому вертикальна складова вектора напруженості дорівнює 0, як це використовують?
Із першої формули безпосередньо випливає, коли у = 0, то й величина Hz = 0 ( тоб то вісь комунікації можна визначити за мінімальним сигналом детектора).
Фізичним поясненням цього явища може служити рис. 5.3 а. Як видно з рисунка при вертикальному положенні антени силові лінії індукційного магнітного поля паралельні виткам антени і тому не індукують в ній струм.
Тому, орієнтуючи антену детектора так, щоби вона вловлювала більше або менше силових ліній поля, можна уточнювати планове положення комунікації. Саме цю властивість зміни горизонтальної складової Н електромагнітного поля використовують для контролю положення осі комунікації.
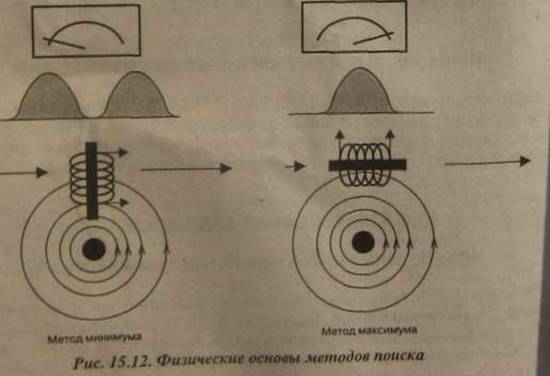
Це використовують для уточнення положення осі комунікації після приблизного його знаходження за максимумом
5.17(2) В якій точці і чому вертикальна складова вектора напруженості дорівнює максимуму, як це використовують?
з другої формули (5.6) випливає, що при у = 0 величина Нy= 21/h = max . Фізичним поясненням цього явища може служити рис. 5.3 б. Як видно з рисунка при горизонтальному положенні антени силові лінії індукційного магнітного поля нормальні до витків антени і тому індукують в ній максимальний струм. Це використовують для приблизного визначення місцезнаходження осі комунікації.
5.19(2) В якій точці і чому горизонтальна складова вектора напруженості дорівнює максимуму, як це використовують?

Рис. 5.2 Індуктивний метод пошуку
Помістивши початок координат на осі провідника струму, а антену приймача (детектор) у точці Р на поверхні землі (рис. 5.2) з умовними координатами у та h, горизонтальну Ну і вертикальну Hz проекції виміряного вектора напруженості магнітного поля можемо знайти за формулами
 (5.6)
(5.6)
Із першої формули безпосередньо випливає, коли у = 0, то й величина Hz = 0 ( тоб то вісь комунікації можна визначити за мінімальним сигналом детектора).
Фізичним поясненням цього явища може служити рис. 5.3 а. Як видно з рисунка при вертикальному положенні антени силові лінії індукційного магнітного поля паралельні виткам антени і тому не індукують в ній струм.
В той же час, безпосередньо з другої формули (5.6) випливає, що при у = 0 величина Нy= 21/h = max . Фізичним поясненням цього явища може служити рис. 5.3 б. Як видно з рисунка при горизонтальному положенні антени силові лінії індукційного магнітного поля нормальні до витків антени і тому індукують в ній максимальний струм.
Тому, орієнтуючи антену детектора так, щоби вона вловлювала більше або менше силових ліній поля, можна уточнювати планове положення комунікації. Саме цю властивість зміни горизонтальної складової Н електромагнітного поля використовують для контролю положення осі комунікації.
Рис.5.3 Фізична основа методу електромагнітної індукції