7.Описание дополнительных элементов к схеме
Трансформатор напряжения
Для сопряжения тахогенератора с платой L154 необходимо произвести понижение выходного напряжения тахогенератора с 230 В до 5.12 В. Это возможно с помощью однофазного трансформатора напряжения, схема включения которого показана на рисунке 4. Первичная обмотка включена на напряжение сети U1, а ко вторичной обмотке (напряжение U2) присоединена плата L154. Для безопасности обслуживания один выход вторичной обмотки заземлен. Трансформатор напряжения в отличие от трансформатора тока работает в режиме, близком к холостому ходу, так как сопротивление параллельных катушек приборов и реле большое, а ток, потребляемый ими, невелик.
Номинальный
коэффициент трансформации определяется
следующим выражением:
 где
U1ном
и U2ном
- номинальные первичное и вторичное
напряжения соответственно.
где
U1ном
и U2ном
- номинальные первичное и вторичное
напряжения соответственно.
Тогда для потенциометрического датчика SP2800 получим следующий коэффициент трансформации:

Преобразователь предназначен для вывода напряжения, которое возникает при протекании тока через резистор R6. Схема обеспечивает Uвых = К*Iвх- Коэффициент преобразования схемы К = R6*(R3/R4). Для настройки ОУ при Iвх=0 служит резистор R2. Часть входного тока ответвляется в цепь R1, R2, R3. Резистор R6 — проволочный (нихром).
Так как на входе платы L-154 нам нужно получить значение напряжения от -5.12В до 5.12В, необходимо обеспечить преобразование тока 1 мА в напряжение 5.12 В. Для этого возьмем резисторы со следующими параметрами:
R6 = 64 Ом, R3 = 80 Ом и R4 = 1 Ом. Тогда коэффициент усиления будет равен:
K = R6*(R3/R4) = 64*(80/1) = 5000.
Проведем проверку:


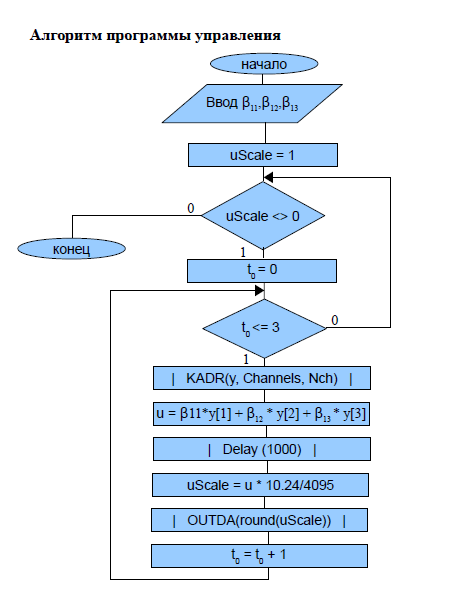
8.Программа на Pascal и алгоритм
Программа управления
program l154;
uses Lcard_154;
var Noch: integer = 3; //число каналов
y: array [1..Noch] of real; //целочисленный массив, в который будут
помещены результаты ввода с Noch каналов//
Channels: array [1..Noch] of integer = {0xC0, 0xC1, 0xC2};
//целочисленный массив с номерами каналов
beta11, beta12, beta13: real;
u: real; // значение напряжения (код)
unitsc: real; //выходное напряжение, подаваемое на плату
timer: integer; //счетчик периодов дискретизации
begin
writeln("Введите значения beta11, beta12, beta13");
readln(beta11, beta12, beta13);
unitsc := 1; // напряжение с коэффициентом масштабирования
while unitsc <> 0 do
begin
timer := 0;
while timer <= 3 do
begin
Sesnsord(y, Channels, Noch); // считываем значения I, φ и ω//
u = beta11*y[1] + beta12*y[2] + beta13*y[3];//вычисление напряжения//
u = u*(-1);
unitsc := u*10.24/4095; //масштабирование напряжения
Delay(100); //задержка 1 с
OUTDA (round(unitsc)); //вывод напряжения на двигатель
timer := timer + 1 //наращиваем параметр цикла
end
end
end.
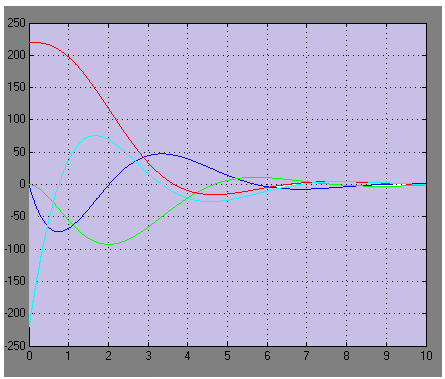
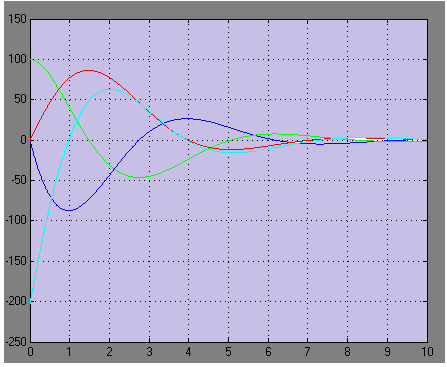
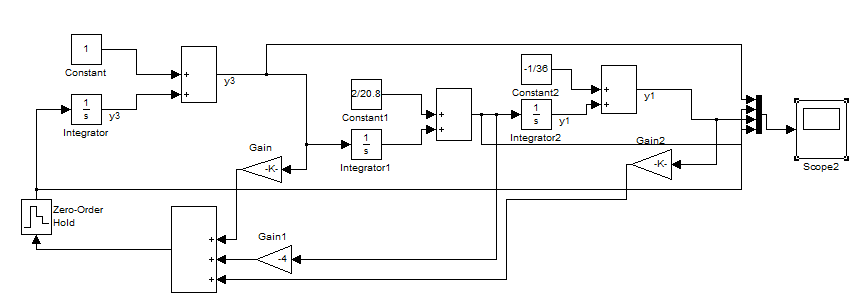
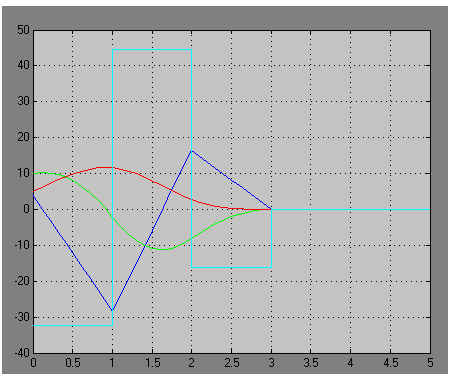
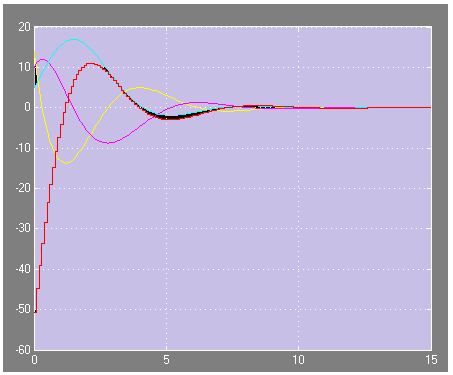
9.Схема моделирования
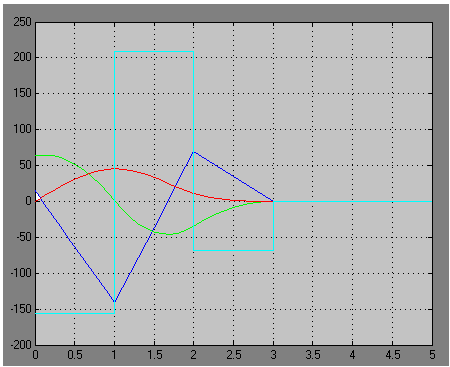
При е=0.1

При т=0.01