

Расчет точности места судна
Характеристика места судна |
Формула для расчета радиальной (круговой) средней квадратической погрешности места судна |
Примечание |
1 |
2 |
3 |
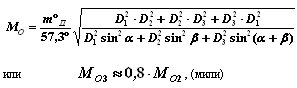
Обсервованное место по пеленгам на три ориентира (3П) |
|
moП– CКП измерения пеленга (град.); D1,2,3 – расстояние в милях до 1-го (D1), 2-го (D2) и 3-го (D3) ориентира (мили); α, β – углы между пеленгами на ориентиры (град.); МО2 – СКП обсервации по двум пеленгам (мили). |
Среднеквадратические погрешности (mU) пеленга (из таблицы 4.3. «мт-2000»)
№ п/п |
Навигационный параметр |
СКП НП (mU) |
1 |
Компасный пеленг по гирокомпасу (через ПГК-2):
|
0,4°÷0,7° 0,6°÷0,9° 1,1°÷1,7° |
16. По визуальному пеленгу и радиолокационном расстоянию определение места судна можно производит тогда, когда (как и при крюйс-пеленге) с судна виден лишь один ориентир. Два наблюдателя — один по пеленгатору компаса, другой при помощи РЛС—одновременно определяют пеленг и радиолокационное расстояние до наблюдаемого ориентира. Затем на карте прокладывают линию пеленга ориентира и на ней делают засечку от наблюдаемого ориентира циркулем с радиусом, равным измеренному расстоянию.
Точность определения
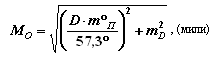
Обсервованное место по пеленгу и расстоянию до одного ориентира (П и DР) |
|
moП – СКП измерения пеленга (град.); mD – СКП измерения расстояния до ориентира (мили); D – расстояние до ориентира (мили). |
Опознавание береговой черты
Судовая РЛС применяется главным образом для определения места судна по измеренным до ориентиров расстояниям. При наличии точечных или имеющих характерные очертания ориентиров можно для этого использовать и радиолокационные пеленги (РЛП).
Реализация определения места судна с помощью РЛС зависит и от того, как точно опознаны те ориентиры, по которым производятся замеры расстояний (DР) и пеленгов (РЛП).
При подходе к берегу с моря возникает задача опознавания района нахождения судна. Основными признаками для опознавания берега является конфигурация береговой черты, отдельно лежащие в море скалы, островки и т.п.
Опознавание береговых объектов для последующего определения места судна может производиться или способом веера пеленгов и расстояний, или способом траверзных расстояний.
1. Способ веера пеленгов и расстояний.
Этот способ обычно применяется при изрезанном обрывистом береге или в том случае, когда на берегу (или в море) имеются характерные ориентиры.
Сущность способа состоит в следующем (рис. 21.1):
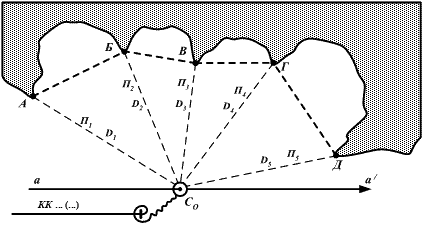
Рис. 21.1. Способ веера пеленгов и расстояний
На экране ИКО РЛС подбираются хорошо
видимые и характерные объекты. Затем в
быстрой последовательности измеряются
РЛП и DР
до этих объектов (Ор. А –
РЛП1,
DР1;
Ор. Б – РЛП2,
DР2;
Ор. В – РЛП3,
DР3;
Ор. Г – РЛП4,
DР4;
Ор. Д – РЛП5,
DР5).
На момент средних наблюдений (Ор. В)
замечается
![]() .
.
На листе кальки проводится прямая а–а′ и на ней из произвольной точки (т. С0) прокладываются истинные значения (Пi = РЛПi + ΔК, Di = DРi + ΔDP) всех измеренных пеленгов и расстояний в масштабе путевой навигационной карты.
Соединив штриховой линией (– – –)точки пеленгов, соответствующих измеренным (и исправленным) расстояниям, получаем ломаную линию, которая и будет приближенным изображением контура берега.
Подготовленную таким образом кальку перемещают по путевой карте так, чтобы линия а–а′ всегда оставалась параллельной курсу судна, а ломаная (штриховая) линия в наибольшей степени совпадала бы с изображением берега на карте и чтобы большее число П и D соответствовало характерным ориентирам на берегу, и если так, то это значит, что участок побережья опознан. В т. С0 кальки делается укол циркулем-измерителем и эта точка (т. С0), но уже на путевой навигационной карте, считается ориентировочным местом судна на средний момент наблюдений.
Если скорость судна при измерении
радиолокационных пеленгов (РЛП) и
расстояний (DР)
более 12 узлов, то время и отсчет лага
![]() замечаются
при каждом измерении РЛП и DР
и прокладка их на кальке производится
не из одной точки (т. С0),
а из точек, соответствующих месту судна
в момент каждого измерения. В дальнейшем
– аналогично до укола циркулем-измерителем
в точке, соответствующей последнему
измерению РЛП и DР.
замечаются
при каждом измерении РЛП и DР
и прокладка их на кальке производится
не из одной точки (т. С0),
а из точек, соответствующих месту судна
в момент каждого измерения. В дальнейшем
– аналогично до укола циркулем-измерителем
в точке, соответствующей последнему
измерению РЛП и DР.
Место судна этим способом опознается тем точнее, чем больше взято пеленгов и расстояний и чем характернее выражены контуры наблюдаемых ориентиров.