

34.9. Атласы приливо-отливных явлений
19. Комбинированные способы определения места судна
Комбинированными способами называют такие способы определения места судна, при которых измеряются разнородные навигационные параметры: визуальный пеленг и расстояние, пеленг и горизонтальный угол, пеленг и глубина, астрономическая линия положения и радиопеленг и т. п. Рассмотрим некоторые из визуальных комбинированных способов определения места судна.
По пеленгу и расстоянию. Для определения места этим способом необходимо иметь в видимости ориентир, нанесенный на карту, до которого имеется возможность измерить расстояние и компасный пеленг.
|
Рис. 86. Определение места по расстоянию и пеленгу |
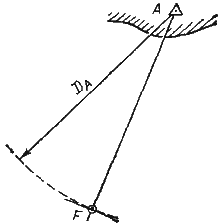
Однако одновременное измерение двух навигационных параметров одним наблюдателем невозможно. Поэтому для уменьшения ошибки места судна из-за разновременности наблюдений измерения необходимо начать с навигационного параметра, который меняется медленнее. Кроме того, рекомендуется наблюдение привести к одному моменту, для чего повторно измерить первый навигационный параметр и значения его осреднить. В этом случае время и отсчет лага заметить в момент измерения второго параметра.
Используя формулу (89) и известные нам значения градиентов расстояния и локсодромического пеленга, можем получить для данного способа значение радиальной ошибки определения места,
![]() (105)
(105)
но так как наблюдения проводятся с использованием одного ориентира, то θ = 90°.
Окончательно получим
![]() (106)
(106)
Практическое выполнение способа. 1. Подобрать ориентир с учетом возможности измерения до него расстояния.
2. Измерить навигационные параметры, начиная с пеленга, если курсовой угол на ориентир острый или тупой; с расстояния, если курсовой угол на ориентир близок к траверзному; с вертикального угла, если по его значению определяется расстояние до ориентира.
3. Заметить время и отсчет лага.
4. Повторить наблюдения первого параметра и его значения осреднить.
5. Исправить результаты наблюдений соответствующими поправками.
6. Проложить истинный пеленг от места ориентира на карте и дугу окружности радиусом, равным измеренному расстоянию до него. В пересечении пеленга и окружности обозначить обсервованное место судна.
По пеленгу и горизонтальному углу. Способ применяется в том случае, когда в видимости судоводителя находятся два нанесенных на карту ориентира, но пеленгование одного из них невозможно (закрыт от наблюдателя у компаса надстройками).
|
|
Рис. 87. Определение места по горизонтальному углу и пеленгу |
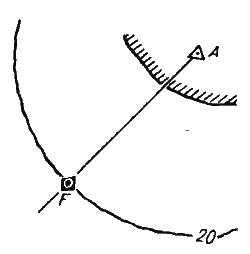
Рис. 88. Определение места по глубине и пеленгу |
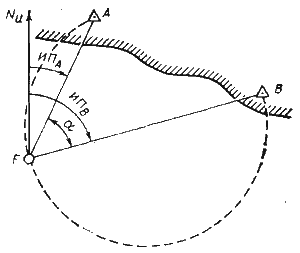
Для получения обсервоваиного места судна необходимо измерить секстаном горизонтальный угол α между ориентирами А и В и компасный пеленг КПA на видимый от компаса ориентир А (рис. 87). Как правило, первым измеряется горизонтальный угол, так как в этом случае влияние неодновременности наблюдений на место судна будет меньше. Далее рассчитывают истинные пеленги на ориентиры
ИПA=КПA+ΔК; ИПB=.ИПA ±α.
В последнем выражении ставится знак «+», если пеленгуется левый ориентир.
Место судна на карте получается в пересечении линий истинных пеленгов, проведенных от ориентиров. Данный способ является, по своей сути, частным случаем определения места по двум пеленгам.
Практическое выполнение способа.
1. Приготовить секстан для наблюдений.
2. Измерить в быстрой последовательности горизонтальный угол между ориентирами и пеленг на видимый от компаса ориентир. Заметить время и отсчет лага.
3. Исправить компасный пеленг поправкой компаса и рассчитать истинный пеленг второго ориентира.
4. Проложить направления истинных пеленгов от места ориентиров на карте и в их пересечении обозначить обсервованное место судна.
Пеленг (расстояние) и глубина. Способ может быть использован в районе, где глубины изменяются заметно, равномерно уменьшаясь в направлении к берегу или к отмели. В этом случае изобаты могут быть использованы в качестве изолиний.
Для получения места измеряют в быстрой последовательности компасный пеленг (расстояние) на ориентир и глубину эхолотом. Место судна будет получено в пересечении истинного пеленга (расстояния), проведенного от ориентира на карте и изобаты, соответствующей измеренной глубине (рис. 88).
При плавании в приливных морях глубину, измеренную эхолотом, необходимо привести к нулю глубин карты. Для этого рассчитывают по таблицам приливов высоту уровня воды на момент определения места судна и исключают ее из измеренной глубины.
Ориентир для наблюдений необходимо подбирать таким образом, чтобы изолиния, соответствующая измеренному навигационному параметру (пеленгу, расстоянию), пересекалась с изобатой под углом, близким к 90°. Точность способа в основном зависит от рельефа дна и достоверности промера.