

Скоростное проседание
Термин “скоростное проседание” обозначает разность между глубинами под килем движущегося судна и судна, не имеющего хода относительно воды.
Причиной скоростного проседания судна является следующий физический процесс, происходящий вокруг движущегося судна.
При рассмотрении движения судна относительно воды можно в равной степени говорить о движении воды относительно судна. Таким образом, частицы воды, встречающие на своем пути корпус судна, вынуждены его огибать вдоль бортов и днища (рис.1).
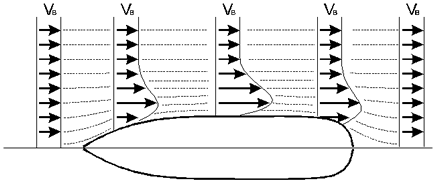
Рис.1
Поскольку вода обладает свойством неразрывности, то вытесняемые в стороны частицы воды, двигаясь по криволинейной траектории, за то же самое время должны пройти больший путь чем частицы, движущиеся по прямой. Следовательно, скорость частиц, огибающих судно, выше скорости частиц, движущихся по прямой. Кроме того, эти частицы, находившиеся в состоянии покоя относительно грунта, образуют поток, движущийся относительно грунта в направлении, встречном направлению движения судна.
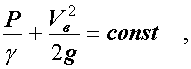
Зависимость между скоростью потока жидкости и давлением жидкости на данном участке описывается уравнением Бернулли:
|
(3) |
где Р - давление жидкости на данном участке;
g - плотность жидкости;
Vв - скорость потока.
Из выражения (3) видно, что если на каком либо участке скорость движения жидкости увеличивается, то для сохранения равенства должно понизиться давление.
Следовательно, во время движения судна, чтобы выражение (3) сохранялось, вокруг судна происходит падение давления, а следовательно, и уровня воды (рис.2).
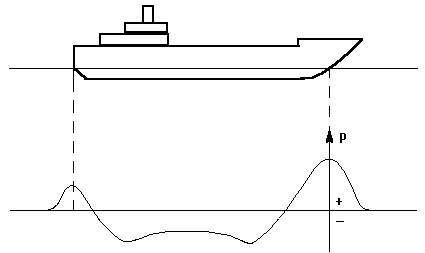
Рис.2
Это и является причиной скоростного проседания судна. Из выражения (3) видно, что чем больше скорость потока, движущегося вдоль корпуса судна, тем больше падает давление, и тем значительнее проседание судна.
Поле вызванных скоростей не симметрично относительно миделя, следовательно, не симметрично и поле давления воды вдоль движущегося судна (рис.2). В носовой части формируется поле повышенного давления за счет лобового сопротивления формы корпуса, замедляющего набегающий поток. В кормовой части замедление потока, огибающего судно, (а следовательно, и повышение давления) происходит за счет влияния “попутного потока”, движущегося вместе с судном. Однако, работа винта, создающего дополнительное разряжение воды у кормовой оконечности, существенно влияет на результирующую величину поля давлений.
Участки повышенного давления в носовой и кормовой оконечностях имеют разную природу и разные величины, зависящие от многих параметров погруженной части корпуса. Несимметричность поля давления вдоль корпуса приводит к тому, что скоростное проседание происходит с изменением дифферента судна. Для большинства судов, имеющих обычную конфигурацию корпуса (без носового бульба), характерно проседание с дифферентом на корму.
Скоростное проседание с дифферентом на нос характерно для крупнотоннажных судов. Результаты натурных испытаний показывают, что у судов с коэффициентом общей полноты Св > 0.8 проседание носовой оконечностью больше, чем кормовой.
При выходе судна на мелководье скоростное проседание увеличивается в сравнении с проседанием на глубокой воде. Причин тому несколько. Одной из причин является меняющаяся картина волнообразования (рис.3). В общем случае движущееся судно образует две системы волн: поперечную, распространяющуюся перпендикулярно диаметральной плоскости судна, и систему волн, образующую сектор (рис.3, а).
Ширина волнового сектора зависит от значения Fr. На мелководье, по мере приближения скорости судна к критическому значению, угол между ДП судна и фронтом расходящихся волн увеличивается. При достижении скорости судна значения, близкого к критическому (Fr » 1), обе системы волн вырождаются в две поперечные волны - носовую и кормовую (рис.3, б)
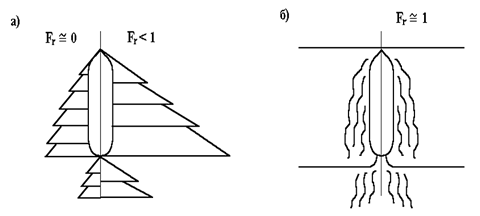
Рис.3
Образовавшиеся поперечные волны имеют значительную амплитуду. У судов с обычными обводами корпуса носовая волна располагается под носовой оконечностью, а кормовая волна - несколько позади кормовой оконечности. Это приводит к тому, что носовая оконечность всплывает на волне с увеличением дифферента на корму.
Другой причиной дополнительного проседания судна на мелководье является малый запас воды под килем. Как уже говорилось, частицы воды, огибающие корпус, движутся с большей скоростью, образуя поле вызванных скоростей (встречный поток). Если поле вызванных скоростей достигает грунта, то там возникает пограничный слой, где силы трения притормаживают встречный поток воды (рис. 4).
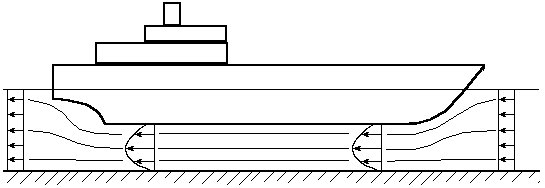
Рис.4
Но для того, чтобы то же количество воды успевало проходить под днищем, скорость потока увеличивается. А увеличение скорости потока под днищем приводит к дополнительному падению давления в этом районе, что и приводит к дополнительному проседанию корпуса.
При движении судна на мелководье с ограниченной акваторией (в узкости) на поле вызванных скоростей оказывают влияние не только дно, но и стенки канала. В результате этого воздействия перепады поля давлений вокруг судна имеют большую амплитуду, чем в условиях неограниченной акватории. Дополнительное падение давления приводит к дополнительному проседанию.
Четкой границы между мелководьем с неограниченной и ограниченной акваторией нет. Дополнительным параметром при оценке поведения судна в мелководном канале служит отношение wк / wÄ , где wк - площадь поперечного сечения канала, а wÄ - площадь поперечного сечения погруженной части мидель-шпангоута. Ощутимое влияние узкости на проседание начинает сказываться при wк / wÄ < 12 .
Для расчета скоростного проседания судна на мелководье существует целый ряд эмпирических формул, дающих порой существенно отличающиеся результаты.
Effects and Signs of Shallow Water
The effect of shallow water on a ship is:
• More ship's power is absorbed by the water due to increased friction.
• Usually sinkage is greater forward than aft for ships of tanker speed and
displacement in any depth.
• Turbulence interferes with rudder and propeller effectiveness.
Signs that the ship has entered shallow water conditions can be:
Wave making increases at the ford end of the ship.
Ship becomes more sluggish to manoeuvre.
RPM indication will show a decrease. If the ship is in "open water"
conditions, i.e. without breadth restrictions, this decrease may be
15% of the service rpm. If the ship is in a confined channel, this
decrease in rpm can be about 20% of the service rpm.
There will be a drop in speed, if the ship is in "open water"
conditions, it may amount to a drop of 60% of the service speed.
The ship may start to vibrate suddenly because of the entrained
water effect causing the natural hull frequency to become resonant
with another frequency.
Pitching reduces, due to cushioning effect of water under the keel.
Factors Governing Ship Squat
Factors governing the ship squat are:
• Ship's speed (Main Factor). Squat is directly approximately proportional
with the speed squared.
• Depth of water: inversely proportional.
• Confines of the channels: inversely proportional.
• Block Coefficient (ratio of the immersed volume of the ship relating to
the water line length, breadth and draft): directly proportional.
• Blockage Factor (immersed cross-section of the ship's mid-ship section
divided by the cross-section of the canal or river): directly proportional.
A graph depicting these relationships should be displayed in the wheelhouse.
How to Calculate Ship Squat
The following formulae can be used as a guidance when calculating squat. Note
however that every vessel is different and characteristics do change from ship to
ship.
Open Water: 1 x Cb V2 / 100
Canals/prismatic channels: 1.43 x Cb x V2 / 100
Rock cuts/diametric channels: 2 x Cb x V2 / 100
Answer is in metres, where Cb is the vessel’s block co-efficient and V is the ships speed in knots.
Форма NAV 04 UKC заполняется при составлении Passage Plan. Где для среди других факторов влияющих на запас глубины под килем входит squat.
SHIPS NAME:
NAV 04 - UNDER KEEL CLEARANCE FORM |
|
|
||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
Under Keel Clearance Calculation |
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
Port |
|
|
||||||||||||||||||||||||||||||||||
Date |
|
|
||||||||||||||||||||||||||||||||||
Time |
|
|
||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
Section 1 – Deepest Navigational Draft |
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
Facility |
Anchorage |
Transit Area |
|
|
||||||||||||||||||||||||||||||
1 |
Mean Draft |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
2 |
Trim |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
3 |
Increase Draft Due List |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
4 |
Intended Transit Speed |
|
|
|
Knots |
|
||||||||||||||||||||||||||||||
5 |
Anticipated Squat |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
6 |
FW/DW Allowance |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
7 |
Corrected Maximum Draft |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
Section 2 – Anticipated Controlling Depth |
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
Facility |
Anchorage |
Transit Area |
|
|
||||||||||||||||||||||||||||||
8 |
Chart Depth |
|
|
|
Metres/Feet (Min) |
|
||||||||||||||||||||||||||||||
9 |
Height of Tide |
|
|
|
Metres/Feet (+ or -) |
|
||||||||||||||||||||||||||||||
10 |
Sea State |
|
|
|
Metres/Feet (-) |
|
||||||||||||||||||||||||||||||
11 |
Past Weather Impact |
|
|
|
Metres/Feet (+ or -) |
|
||||||||||||||||||||||||||||||
12 |
Controlling Depth |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
* or listed controlling depth from latest Data |
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
Section 3 – Anticipated Under Keel Clearance |
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
Facility |
Anchorage |
Transit Area |
|
|
||||||||||||||||||||||||||||||
7 |
Maximum Draft |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
12 |
Controlling Depth |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
13 |
Under Keel Clearance |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
|
Port & Company UKC Requirements |
|
|
|
Metres/Feet |
|
||||||||||||||||||||||||||||||
|
Complies |
|
|
|
Yes/No |
|
||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
Master |
|
Pilot |
|
Date |
|
|
||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
Note - For US Waters Under Keel Clearance Ref. Regulations 33 CFR 157.455 must be read and thoroughly understood prior to completing this fom |
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||
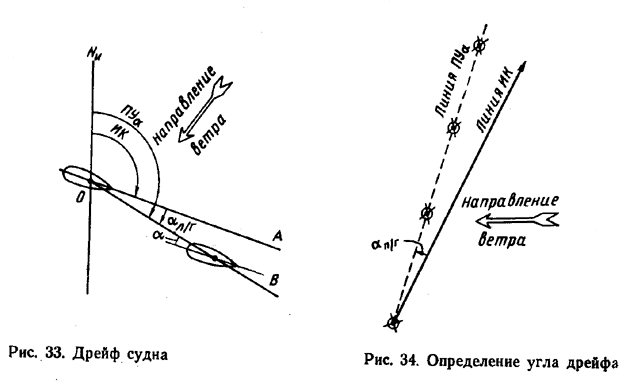
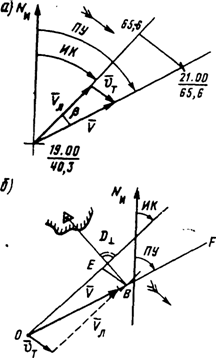
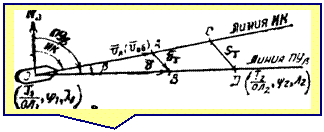
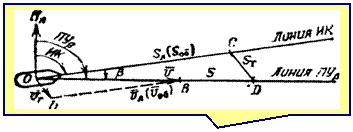
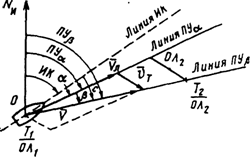 Рис.
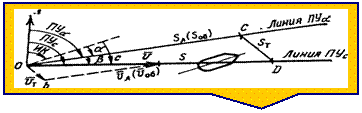
5.4. Совместный учёт дрейфа и сноса
течением.
Рис.
5.4. Совместный учёт дрейфа и сноса
течением.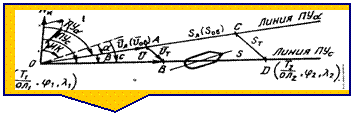


14. Международные стандарты точности судовождения (ИМО-83) действуют в соответствии с резолюцией А-529 (13) 13-й Ассамблеи Международной морской организации (ИМО), принятой 17.ХІ.1983 г. Они являются руководством для Администраций по оценке эффективности работы систем, предназначенных для определения места судна, в том числе радионавигационных систем, включая спутниковые. Эти стандарты не применяются к специализированным видам деятельности, таким, как разведка ресурсов морского дна или деятельности гидрографических служб.
На основе международных стандартов разработаны отечественные (РФ) нормативы точности судовождения (ИНО-89). Они введены в действие инструкцией по навигационному оборудованию (ИНО-89). Международные стандарты точности судовождения :
Район плавания |
Допустимая погрешность текущего места судна (с вероятностью 95%) |
Вход в гавань и подходы к ней, а также воды, в которых ограничена свобода маневра |
В зависимости от местных условий |
Другие воды |
4% расстояния D от ближайшей навигационной опасности, но не более 4 миль |
В таблице даны стандарты ИМО-83 точности судовождения для судов, следующих со скоростью не более 30 уз., в зависимости от района плавания.
Деление на два района плавания не является точным и зависит от местных обстоятельств.
Навигационной опасностью считается всякий признанный или нанесенный на карту элемент либо граница, которые могут представлять или очерчивать опасность для судна, либо ограничивать район плавания.
При входе в гавань и на подходах к ней, а также в водах, в которых ограничена свобода маневра, для обеспечения навигационной безопасности плавания контроль места судна осуществляется с помощью визуальных методов наблюдения, РЛС, эхолота, специальных РНС управления движением судов (СУДС).
Поскольку точность обсервации зависит от систематических и случайных погрешностей, она может быть охарактеризована в терминах теории вероятностей.
В стандартах принято, что для характеристики точности обсервации должна использоваться 95%-й уровень вероятности (Р = 0,95). Эта же вероятность принята за основу при оценке точности места судна и навигационной безопасности плавания.
Например в VShips VMS Fleet Operations Глава 5 Navigation Пункт 5.4.1 с) Position Fixing есть следующие рекомендации по частоте определений:
Area Frequency Fix Type
Ocean Every two hours Satellite
Passages/ When possible Astronomical observations
Deep Sea
Coastal Waters Every 30 minutes, increasing frequency to Visual bearings
every 20 minutes approaching restricted Radar range/bearings
waters. Radar range/bearings
Electronic aid
Parallel Indexing
Restricted Every 20 minutes, increasing frequency to Visual bearings
Waters every 6 minutes in extremely confined Radar range/bearings
waters and port arrival/departure. Electronic aid
Parallel Indexing
Port Arrival / Minimum of every 6 minutes, increasing Visual bearings
Departure frequency as necessary in critical areas as Radar range / bearings
directed by Master. Electronic aid
Parallel Indexing
15. Способ заключается в измерении пеленгов трех ориентиров и является наиболее распространенным. Последовательность работы должна быть такой. Выбирают на карте три удобно расположенных ориентира А, В и С и находят их на местности; берут КП ориентиров в определенной последовательности, записывают их величины, а в момент взятия последнего пеленга замечают отсчет лага и время; исправляют КП в ИП и прокладывают ОИП на карте от соответствующих ориентиров. Если пеленги взяты одновременно, то обсервованное место судна будет в точке пересечения линий ОИП (рис. 71).
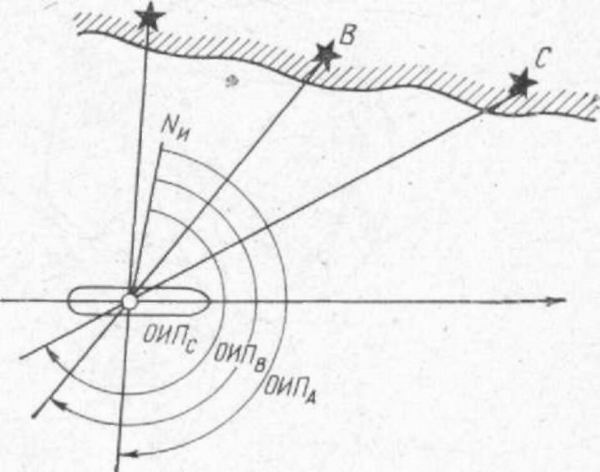 Рис.
71
Рис.
71
Последовательность пеленгования ориентиров в светлое время суток зависит от расположения судна относительно ориентиров. Первым пеленгуют ориентир, находящийся дальше от траверза, и последним — ориентир, расположенный ближе к траверзу. Так поступают для того, чтобы уменьшить влияние скорости перемещения судна за время пеленгования на точность определения. В темное время суток очередность пеленгования ориентиров зависит от характеристики их огней. Первым пеленгуют ориентир с характеристикой огня — проблесковый или группо-проблесковый, последним — постоянный или постоянно-проблесковый. При скорости свыше 12 узлов для уменьшения влияния ее на точность определяемого места необходимо приводить пеленги к одному моменту. Для этой цели берут пять пеленгов трех предметов. Вначале берут в намеченной последовательности пеленги всех трех ориентиров, замечают время и отсчет лага, а затем вторично берут КП на второй и первый ориентиры. Перед исправлением КП в ИП находят приведенные КП первого и второго ориентиров как среднее арифметическое их значение:
и
КП3 исправляют в ИП3 непосредственно. Прокладка ОИП на карте выполняется в обычном порядке. Если бы наблюдения не содержали ошибок и пеленги были взяты одновременно, то все три линии ОИП пересекались бы в одной точке. Однако из-за неизбежного действия ряда факторов проложенные на карте три линии не пересекаются в одной точке, а образуют треугольник, называемый треугольником погрешности. Если треугольник погрешности равносторонний и его сторона не более 5 мм в масштабе путевой карты, то можно принять место судна в середине этого треугольника. Если же две стороны его имеют большую длину, чем третья, то место судна принимают ближе к его более короткой стороне. Если стороны треугольника имеют большие размеры, то следует проверить правильность опознания ориентиров, измерений и расчетов и повторить наблюдения. Если повторные наблюдения не изменяют положения, то следует отнести треугольник погрешности за счет ошибки в поправке компаса. Рассмотрим это на рис. 72.
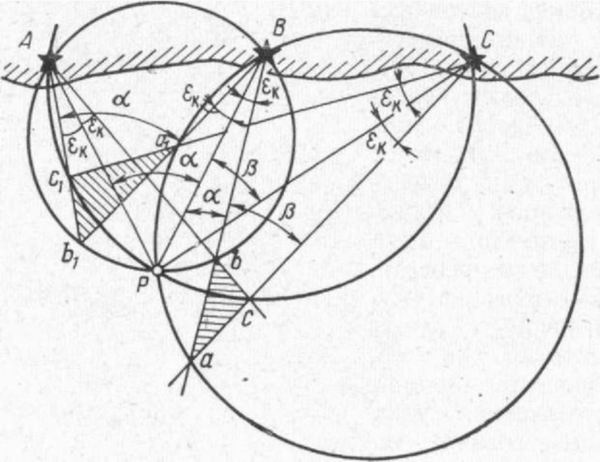 Рис.
72
Рис.
72
Все взятые пеленги исправляются одной и той же А/С. Если величина АК точно известна и пеленги взяты одновременно, то все три линии ОИП пересекутся в одной точке Р — истинном месте судна. Если АК взята с ошибкой Ек, пеленги будут проложены с этой ошибкой и их линии будут отклонены на одинаковый угол Ек в одну сторону, образуя треугольник погрешности abc, правее точки Р. В этом треугольнике вершина угла b, образованного пеленгами ориентиров А и В, будет лежать на окружности АРВ, угла b — на окружности ВPC, а угла с — на окружности АРС (угол а + b). Если ошибка Eк будет иметь иной знак, то все три линии ОИП отклонятся в другую сторону, образуя треугольник погрешности a1b1c1 левее точки Р. Треугольники погрешности сохранили подобие, а их вершины расположились на окружностях, вмещающих углы между линиями пеленгов. При этом каждая окружность, вмещающая один из углов, проходит через соответствующую вершину треугольника погрешности и через истинное место судна Р. Это свойство треугольников погрешности дает возможность не только получить точное обсервованное место судна независимо от ошибки в А/С, но и определить последнюю одновременно с определением места судна по трем пеленгам, что можно выполнить графическим способом или переходом к двум углам. Графический способ. При получении треугольника погрешности изменяют А/С на 2—3° прокладывают на карте вновь рассчитанные пеленги, которые образуют новый треугольник погрешности меньше или больше прежнего, или пересекутся в одной точке. Когда новый треу гольник меньше прежнего и не переменит своей ориентировки, измененная АK будет ближе к истинному значению, чем первоначальная А/С.
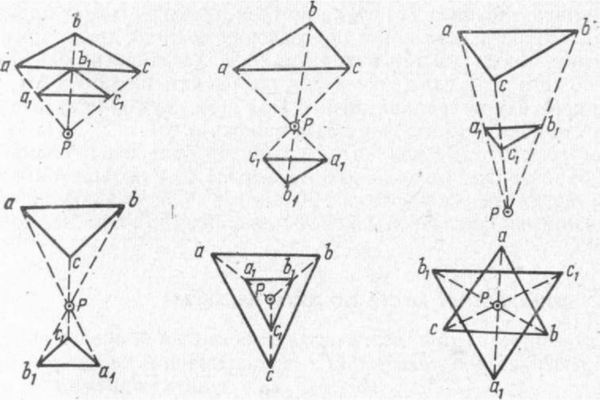 Рис.
73
Рис.
73
Перемена ориентировки нового треугольника по отношению к прежнему указывает на то, что новая АК имеет другое значение, чем принято раньше. Если все три линии пеленга с новой поправкой пересекутся в одной точке, это значит, что А/С изменена правильно. Если новый треугольник больше или меньше прежнего, то, соединив сходственные вершины двух треугольников прямыми линиями, в пересечении их получим истинное место судна. При таком построении отрезки дуг aa1 bb1 cc1, (см. рис. 72) заменяются отрезками прямых линий, пренебрегая незначительной кривизной дуг вмещающих окружностей. Наиболее характерное расположение треугольников погрешностей abc, полученного первоначально, и a1 b1 c1 полученного после прокладки пеленгов с изменением А/С, показано на рис. 73. Способ перехода к двум углам. Для исключения ошибки в А/С при нахождении места судна по трем пеленгам рассчитывают между тремя компасными пеленгами ориентиров два угла. Правый горизонтальный угол будет равен разности между компасными пеленгами правого и среднего ориентиров, а левый — разности между компасными пеленгами среднего и левого ориентиров. Полученные горизонтальные углы используют для нахождения места судна подобно определению места по двум углам. Действительная поправка компаса на данном курсе определяется путем сравнения снятых с карты истинных значений пеленгов с измеренными по компасу в виде среднего значения трех величин:

При определении места судна по трем пеленгам может быть случай неопределенности, как и при определении места по двум горизонтальным углам. Когда все три ориентира располагаются на одной окружности, то хотя и все три пеленга будут содержать ошибку в АK, равную Eк, они пересекутся в одной точке. При этом нельзя не только определить место судна, но и обнаружить ошибку в АK. Чтобы место судна получить с возможно большей точностью, углы между ориентирами не должны быть меньше 30 и больше 150°; лучший случай, когда эти углы близки к 60 или 120°. Обсервацию, при которой угол пересечения пеленгов менее 30 или более 150°, в расчет принимать нельзя.