

Превращение свободного гироскопа в гирокомпас.
Если главную ось свободного гироскопа установить в плоскости меридиана, то с течением времени вследствие вращения Земли ось будет уходить из этой плоскости, совершая относительно последней видимое движение.
Направляющий момент достигает максимального значения на экваторе при отведении главной оси гироскопа от меридиана на 90°. С увеличением широты направляющий момент уменьшается и на полюсе обращается в нуль. Поэтому на полюсе гирокомпас работать не может.
В гирокомпасах типа «Курс» чувствительный элемент представляет собой герметически закрытый шар, называемый гиросферой. Подвес гиросферы обеспечивает возможность вращения вокруг всех трех осей. Для предупреждения вредного влияния качки гироскопическая система гиросферы смонтирована из двух гироскопов.
Гироскопы расположены в гиросфере под углом 90° друг к другу и под углом 45° к линии NS гиросферы. Гироскопы связаны между собой кривошипом, а с оболочкой гиросферы — пружинами и могут вращаться вокруг своих вертикальных осей.
На транспортных судах морского флота Советского Союза широкое распространение получил гирокомпас «Курс-4». И «Вега». На судах рыбопромыслового и вспомогательного флота гирокомпасы типа «Амур», которые имеют меньшие размеры, чем гирокомпасы типа «Курс».
Сейчас применяются (“Anschuetz Standard”, “Sperry Marine Navigat”, “Simrad”, “Tokyo Keiki” и др.)(маятниковые гирокомпасы)
8. Гирокомпас свободен от магнитной девиации, но на его показаниях сказываются: изменения курса, скорости и географической широты места нахождения (скоростная Девиация (компаса)); движение с ускорением (баллистическая Девиация (компаса)); качка, особенно бортовая при курсах NO и NW (четвертная Девиация (компаса)). Девиация (компаса) гирокомпаса компенсируется или ограничивается корректорами.
Скоростной погрешностью гирокомпаса называется постоянное в данной широте азимутальное отклонение оси гирокомпаса от истинного меридиана, происходящее вследствие движения судна с постоянной скоростью на постоянном курсе.
Скоростная погрешность имеет полукруговой характер, для курсов северной половины горизонта она отрицательна, южной — положительна. В большинстве конструкций гирокомпасов она исключается автоматическими или полуавтоматическими корректорами. В некоторых конструкциях скоростная погрешность исключается только из показаний принимающих.
Инерционные погрешности гирокомпаса вызываются возмущающими моментами сил инерции, возникающими при ускоренном движении судна. При появлении моментов этих сил ось гирокомпаса выходит из своего положения равновесия и совершает прецессионное движение со скоростью, зависящей от значения момента силы инерции. Инерционная девиация проявляется в форме затухающих колебаний после окончания маневра судна (курсом и/или скоростью).
Образующаяся в результате маневра переменная погрешность называется инерционной погрешностью гирокомпаса. Она свойственна большинству современных гирокомпасов независимо от их конструкции.
1.Возникновение скоростной девиации обуславливается наличием у корабля северной составляющей скорости движения. 2.Девиация линейноОсно зависит от скорости судна. 3.Девиация имеет полукруговой характер зависимости от компасного курса (максимальные по абсолютному значению девиации достигаются на курсах 0 и 180˚, нулевые – на курсах 90 и 270˚). 4.Зависимость девиации от широты определяется функцией 1/cos φ = sec φ, поэтому особенно резкое увеличение его численного значения происходит в широтах выше 70˚. Скоростная девиация в ГК учитывается путем ее исключения из показаний всех репитеров с помощью корректоров полуавтоматического или автоматического типа. При скоростях, не превышающих 25 уз, в широтах не выше 80˚ скоростная девиация имеет значение, не превышающее 10˚.
9. К морским картам предъявляются следующие требования:
→ должны обладать геометрической точностью, соответствующей назначению карты;
→ быть достоверными по содержанию;
→ иметь простое и хорошо читаемое изображение нанесенной нагрузки и, прежде всего, объектов, имеющих навигационное значение;
→ составляться в таких картографических проекциях, которые позволили бы наиболее удобно и просто выполнять необходимые графические построения и расчеты для решения задач судовождения;
→ быть пригодными для нанесения на них специальных объектов, сеток и других элементов, необходимых для навигационных расчетов;
→ отражать действительность с подробностью, отвечающей их назначению;
→ печататься на бумаге, имеющей незначительную деформацию в условиях хранения на судне и допускающей многократное применение карандаша и резинки;
→ иметь формат, удобный для использования в условиях штурманской рубки.
Масштабом карты называется отношение длины линии, взятой на карте, к действительной длине той же линии на местности. Масштабы выражаются в линейных или численных значениях. На картах указывается главный (средний) масштаб.
Численным или числовым масштабом называется отношение данной линии на условном глобусе к длине соответствующей ей линии на местности. Числовой масштаб изображается в виде дроби: 1/50.000; 1/750.000 и т.д.; знаменатель показывает, какова степень уменьшения длин на условном глобусе. Числовой масштаб может быть задан и в таком виде:
1 :100.000; 1 :250.000; 0,000001; 0,00004 и т.д.
При графической работе на карте применяется линейный масштаб, показывающий число единиц, принятых для измерения длин на местности (км, мили), содержащихся в единице, принятой дли измерения длин на карте (мм, см.)
На МНК в проекции Меркатора линейный масштаб разбивается вдоль боковых рамок карты. На топографических и географических картах линейный масштаб изображается в виде короткой шкалы под нижней рамкой карты.
Предельная точность, которую может рассмотреть человеческий глаз, равна 0,1 мм. Та длина на местности, которая соответствует 0,1 мм. на карте, называется предельной точностью масштаба (scale accuracy limit) (. Для карты 1 : 1 000 000 предельная точность масштаба составляет 100 м. Расстояния меньше этого простым глазом на карте масштаба 1 : 1 000 000 рассмотреть нельзя.
10. Предложенная Меркатором проекция относится к разряду нормальных цилиндрических равноугольных проекций.
Карты, построенные в этой проекции, называются меркаторскими, а проекция → проекция Меркатора или меркаторская проекция.
В меркаторской проекции все меридианы и параллели прямые и взаимноперпендикулярные линии, а линейная величина каждого градуса широты постепенно увеличивается с возрастанием широты, соответственно растягиванию параллелей, которые все в этой проекции по длине равны экватору.
Проекция Меркатора по характеру искажений относится к классу равноугольных.
Для получения морской навигационной карты в проекции Меркатора условный глобус помещают внутрь касательного цилиндра таким образом, чтобы их оси совпали.
Затем проецируют из центра глобуса меридианы на внутренние стенки цилиндра. При этом все меридианы изобразятся прямыми, параллельными между собой и перпендикулярными экватору линиями. Расстояния между ними равны расстояниям между теми же меридианами по экватору глобуса. Все параллели растянутся до величины экватора. При этом параллели, ближайшие к экватору, растянутся на меньшую величину и по мере удаления от экватора и приближения к полюсу величина их растяжения увеличивается.
Закон растяжения параллелей (рис. 6.1).
|
|
|
а) |
б) |
в) |
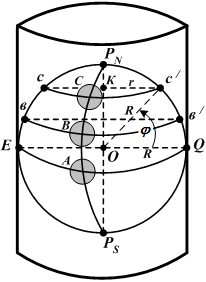
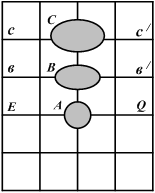
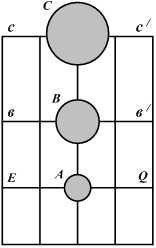
Рис. 6.1. Закон растяжения параллелей
R и r – радиус Земли и произвольной параллели (СС′).
φ – широта произвольной параллели (СС′).
Из прямоугольного треугольника ОС′К получим:
R = r · secφ |
(6.5) |
Обе части равенства умножим на 2π, получим:
2π · R = 2π · r · secφ |
(6.6) |
-
где
2π · R – длина экватора;
2π · r – длина параллели в широте φ.
Следовательно, длина экватора равна длине соответствующей параллели, умноженной на секанс широты этой параллели. Все параллели, удлиняясь до длины экватора, растягиваются пропорционально secφ.
Разрезав цилиндр по одной из образующих, и развернув его на плоскость, получим сетку взаимно перпендикулярных меридианов и параллелей (рис. 6.1б).
Эта сетка не удовлетворяет требованию равноугольности, т.к. изменились расстояния между меридианами по параллели, ибо каждая параллель растянулась и стала равной длине экватора. В результате фигуры с поверхности Земли перенесутся на сетку в искаженном виде. Углы в природе не будут соответствовать углам на сетке.
Очевидно, для того, чтобы не было искажений, т.е. чтобы сохранить на карте подобие фигур, а следовательно, и равенство углов, необходимо все меридианы в каждой точке растянуть на столько, на сколько растянулись в данной точке параллели, т.е. пропорционально secφ. При этом эллипс на проекции вытянется в направлении малой полуоси и станет кругом, подобным острову круглой формы на поверхности Земли. Радиус круга станет равным большой полуоси эллипса, т.е. будет в secφ раз больше круга на поверхности Земли (рис. 6.1в).
Полученная таким образом картографическая сетка и проекция будут полностью удовлетворять требованиям, предъявленным к морским навигационным картам, т.е. проекцией Меркатора.
Локсодромия – кривая, пересекающая все меридианы под одним и тем же углом – на МНК проекции Меркатора прямая линия; на глобусе – логарифмическая спираль, обращенная выпуклостью к экватору и стремящаяся к полюсу, но никогда его не достигающая.
.
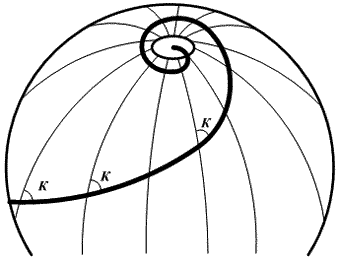
Рис. 6.2. Локсодромия на земном шаре
Судно, совершающее плавание постоянным курсом, перемещается именно по локсодромии.
– при К = 0°(180°) → локсодромия совпадает с меридианом;
– при К = 90°(270°) → локсодромия совпадает с параллелью, а при φ = 0° – с экватором;
– при любых других К – локсодромия является логарифмической спиралью, стремящейся к полюсу, но никогда его не достигающей;
– локсодромия своей выпуклостью обращена к экватору.
Длину и направление локсодромии по известным координатам точек вычисляют по формулам аналитического счисления.
Формула показывает, что прямая линия на меркаторской проекции действительно представляет собой локсодромию.
Таким образом, проводя на меркаторской проекции параллели в расстоянии МЧ от экватора, удовлетворяются оба требования, предъявляемые к морской навигационной карте.
Ортодромия – дуга большого круга (ДБК) – кратчайшее расстояние между двумя точками на земной сфере – кривая, обращенная (на МНК в проекции Меркатора) выпуклостью к ближайшему полюсу (рис.26.1). На картах в гномонической проекции – прямая линия.
При курсе судна 0°(180°) – локсодромия и ортодромия «сливаются» в одну линию, совпадающую с географическим меридианом.
При курсе судна 90°(270°) при φ = 0° – также «сливаются» в одну линию, совпадающую с земным экватором.
При плавании судна на большие расстояния (тысячи миль) экономно плыть по ортодромии, так как это – кратчайшее расстояние между заданными точками.
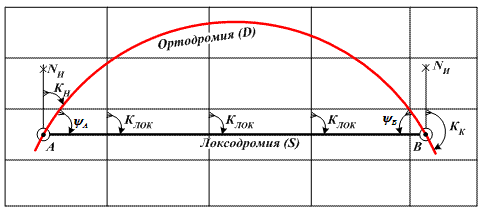
Рис. 26.1. Локсодромия и ортодромия на меркаторской путевой карте