

Розділ 1 Кінематика
Задача 1. За заданими рівняннями руху точки М встановити вид її траєкторії та для часу t=t,(c) знайти положення точки на траєкторії, 'пі швидкість, повне, дотичне та нормальне прискорення, а також радіус кривизн ни траєкторії у відповідній точці (табл. 1)
П риклад
виконання задачі 1.
риклад
виконання задачі 1.
Вихідні дані:
1. Визначаємо траєкторію та положення точки на траєкторії на момент часу t1. Для того, щоб одержати рівняння траєкторії точки в формі залежності між координатами, треба виключити параметр t з рівняння, руху. З першого рівняння руху точки визначимо:
П![]()
![]() ісля
підстановки до другого рівняння одержимо:
ісля
підстановки до другого рівняння одержимо:
|
Ц |
 Рис.1
Рис.1Для знаходження положення точки на траєкторії обчислимо зна-
чения її координат на момент часу t1 =0,5с.
х1 = 2см ; у1 = Зсм . Накреслимо траєкторію точки та її положення на момент часу t1 (рис. І).
Визначаємо швидкість точки.
Знаходимо проекції швидкості на осі координат:
![]()
![]() .
.
Величина швидкості точки дорівнює
![]()
При t=t1 V1 =16,5 см/с.
Для визначення напрямку швидкості обчислимо спрямовуючі косинуси :

Зображаємо на рисунку
швидкість точки
![]()
Визначаємо прискорення точки. Знаходимо проекції прискорення
точки на осі координат:
![]() ;
;
![]() .
.
Величина прискорення дорівнює
![]() ,
на будь–який час.
,
на будь–який час.
 Обмислимо
спрямовуючі косинуси:
Обмислимо
спрямовуючі косинуси:

Таблиця 1
№ вар. |
Р і в н я н н я р у х у |
t, с |
|
|
|
||
1 |
2 |
3 |
4 |
1. |
|
|
|
2. |
|
|
0,5 |
3. |
|
|
1 |
4. |
x = 10t |
y = 4,9t2 |
2 |
5. |
|
|
|
6. |
x = 20t |
y = 245-4gt2 |
4 |
7. |
|
|
|
8. |
|
|
1,5 |
9. |
|
|
|
10. |
|
|
1 |
11. |
|
|
|
12. |
|
|
1 |
13. |
|
|
|
14. |
|
|
0,5 |
15. |
|
|
1 |
16. |
|
|
2 |
17. |
|
|
|
18. |
|
|
1,5 |
19. |
|
|
2 |
20. |
|
|
|
Закінчення таблиці 1
1 |
2 |
3 |
4 |
21. |
|
|
|
22. |
|
|
1 |
23. |
|
|
1 |
24. |
|
|
1 |
25. |
|
|
3 |
26. |
|
|
1 |
27. |
|
|
0,5 |
28. |
|
|
1 |
29. |
|
|
0,5 |
30. |
|
|
1 |
4. Визначення
![]() .
.
Дотичне прискорення точки дорівнює
![]()
При
![]() см/с2.
см/с2.
Тоді нормальне прискорення точки
![]() см/с2.
см/с2.
На
рисунку зображаємо дотичне та нормальне
прискорення. Радіус
кривизни траєкторії визначаємо з формули
для нормального прискорення
![]() .
.
При
![]() см.
см.
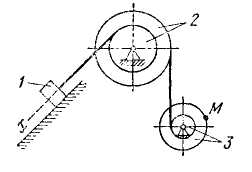
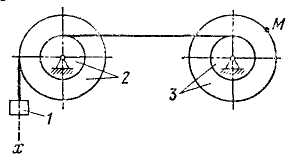
Задача 2. За поданими рівняннями прямолінійного поступального руху вантажу 1 х=х(t) визначити швидкість, обертальне, доосьове та повне прискорення точки М механізму в той час, коли шлях, який пройшов вантаж, дорівнює S. Координата х в сантиметрах, час t - у секундах (рис.2–31).
Приклад виконання задачі 2.
Дана схема механізму (рис.32).
Вихідні дані:
![]() .
.
Визначаємо той момент часу τ, коли шлях, який пройшов вантаж А, дорівнює 40см.
![]()
Тоді
![]()
Знайдемо кутові швидкості та кутові прискорення 2-ї та 3-ї ланки механізму. Величина швидкості вантажу 1
![]() см/с.
см/с.
Тому, що нитка
нерозтяжна, величина швидкості вантажу
1 дорівнює
величині швидкості точки А, тобто
![]() см/с.
см/с.
Величина кутової швидкості 2-ї ланки механізму дорівнює
![]()
Знаходимо величину кутової швидкості 3-ї ланки із співвідношення
![]() звідки
звідки
![]()
Величина кутового прискорення дорівнює
![]()
Кутова швидкість та кутове прискорення колеса 3 спрямовані вздовж осі обертання за креслення.
Рис.2 |
Вар. |
|
1 |
||
Рис.3 |
2 |
|
Рис.4 |
3 |
|
Рис. 5 |
4 |
|
Рис. 6 |
Вар. |
|
5 |
||
Рис. 7 |
6 |
|
Рис. 8 |
7 |
|
Рис. 9 |
8 |
|
Рис. 10 |
Вар. |
|
9 |
||
Рис.11 |
10 |
|
Рис. 12 |
11 |
|
Рис. 13 |
12 |
|
Рис. 14 |
Вар. |
|
13 |
||
Рис. 15 |
14 |
|
Рис.16 |
15 |
|
Рис. 17 |
16 |
|
Рис.18 |
Вар. |
|
17 |
||
Рис.19 |
18 |
|
Рис. 20 |
19 |
|
Рис. 21 |
20 |
|
Рис. 22 |
Вар. |
|
21 |
||
Рис. 23 |
22 |
|
Рис. 24 |
23 |
|
Рис. 25 |
24 |
|
Рис. 26 |
Вар. |
|
25 |
||
Рис. 27 |
26 |
|
Рис. 28 |
27 |
|
Рис. 29 |
28 |
|
Рис. 30 |
Вар. |
|
29 |
||
Рис. 31 |
30 |
|


























































Знаходимо величини швидкості, обертального, доосьового та повного скорень точки М.
Величина швидкості точки М дорівнює
![]()
Швидкість спрямована перпендикулярно до радіусу в бік обертання колеса 3 (рис. 132). Величина обертального прискорення дорівнює
![]()
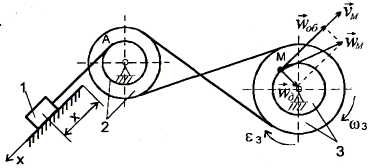
Рис. 32
Спрямоване обертальне прискорення так само, як і швидкість, тобто колесо 3 обертається прискорено. Величина доосьового прискорення точки М дорівнює
![]()
Спрямоване
![]() по радіусу
кола до його центру.
по радіусу
кола до його центру.
Величина повного прискорення дорівнює
![]()
На рисунку зображаємо швидкість та прискорення точки М.
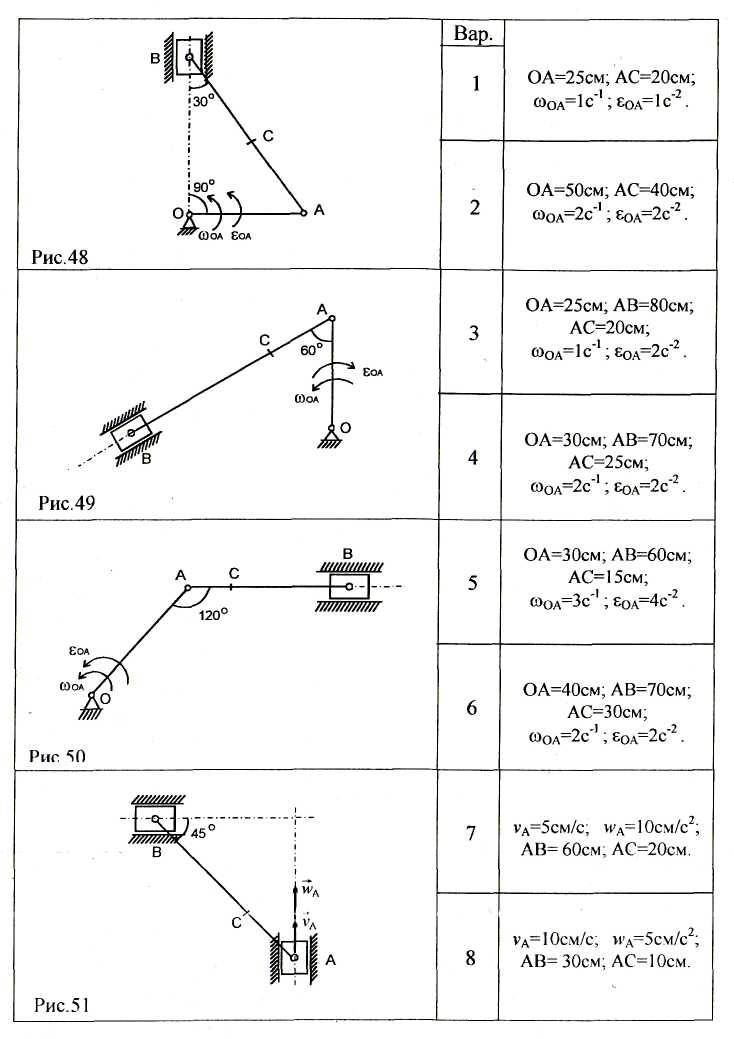
Задача 3. У механізмах, наведених на рис.34 - 63, визначити швидкості всіх позначених точок, а також кутові швидкості всіх ланок, вважаючи, що всі відстані та означені на рисунках швидкості відомі.

Рис.33
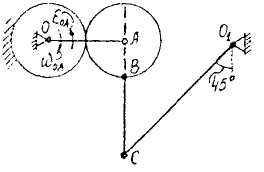
Приклад виконання задачі 3.
Дана схема механізму (рис. 33)
Вихідні
дані:
![]() кутова швидкість ланки 1
- кривошипа
О А;
кутова швидкість ланки 1
- кривошипа
О А;
геометрія креслення.
1. Ланка 1 - кривошип ОА.
Кривошип обертається навколо нерухомої осі, що проходить через точку О перпендикулярно до площини креслення. Тому величина швидкості точки А дорівнює
![]()
та спрямована перпендикулярно ОА, як показано на кресленні (рис.33).
2. Розглянемо ланку 2 - колесо.
Колесо здійснює плоскопаралельний рух. Для того, щоб визначити швидкість будь-якої точки колеса та його кутову швидкість, необхідно побудувати миттєвий центр швидкостей. Оскільки колесо котиться без ковзання по нерухомій поверхні, миттєвий центр швидкостей знаходиться в точці дотику колеса та поверхні. Позначимо цю точку M2. Використовуючи те, що величини швидкостей точок пропорційні відстаням від точок до миттєвого центру швидкостей, запишемо співвідношення
![]() звідки
звідки
![]()
Спрямована швидкість точки В перпендикулярно відрізку, що з'єднує точку з МЦШ, в бік обертання тіла (рис. 33).
Щоб визначити величину кутової швидкості тіла, треба величину швидкості будь-якої точки тіла розділити на її відстань до МЦШ:
![]()
Покажемо на
кресленні вектор
![]() (рис.33).
(рис.33).
3. Ланка 3 - шатун BD.
Шатун здійснює плоскопаралельний рух. Відомі величина та напрямок швидкості точки В та напрямок швидкості точки D, бо точка D одночасно належить і повзуну, який може рухатись вздовж вертикальних спрямовуючих.
Оскільки швидкості
![]() паралельні,
але не перпендикулярні
паралельні,
але не перпендикулярні
відрізку, який їх з'єднує, миттєвий центр швидкостей знаходиться у нескінченності. В цьому випадку шатун здійснює миттєво-поступальний рух, тому
![]()
4. Ланка 4 - шатун CF.
Шатун здійснює плоскопаралельний рух. Відомі величина та напрямок швидкості точки С та напрямок швидкості точки F. (Точка F належить і повзуну, що рухається вздовж горизонтальних спрямовуючих).
Для даного
положення механізму миттєвий центр
швидкостей буде знаходитись в точці F,
тому що
перпендикуляри до швидкостей
![]()
перетинаються
у точці
F.
Виходячи
з цього
![]()
Т![]() оді
оді
звідки
![]()
![]()
Напрямки![]() зображені
на кресленні (рис. 33).
зображені
на кресленні (рис. 33).
Рис.34
|
Рис.35
|
|
||
Рис.36
|
Рис.37
|
|
||
Рис.38
|
Рис.39
|
|||
Рис.40
|
Рис.41
|
|||
Рис.42
|
Рис.43
|
|||
Рис.44
|
Рис.45
|
|||
Рис.46
|
Рис.47
|
|||
Рис.48
|
Рис.49
|
|||
Рис.50
|
Рис.51
|
|
||
Рис.52
|
Рис.53
|
|
||
Рис.54
|
Рис.55
|
|
||
Рис.56
|
Рис.57
|
|
||
Рис.58
|
Рис.59
|
|
||
Рис.60
|
Рис.61
|
|
||


























Рис.62
|
Рис.63
|
5. Ланка 5 - шатун EL.
Шатун EL
здійснює
плоскопаралельний рух. Відомі величина
та напрямок швидкості точки Е
та
напрямок швидкості точки L,
бо точка
L
належить
одночасно і
кривошипу KL,
а отже
швидкість
![]() спрямована вздовж перпендикуляра до
KL.
Побудуємо
перпендикуляри до швидкостей
спрямована вздовж перпендикуляра до
KL.
Побудуємо
перпендикуляри до швидкостей
![]() та
.Точка
перетину –
М5,миттєвий
центр швидкостей ланки 5.
та
.Точка
перетину –
М5,миттєвий
центр швидкостей ланки 5.
Тоді
![]()
звідки
![]()
![]()
Напрямки
![]() зображені
на кресленні (рис. 33).
зображені
на кресленні (рис. 33).
6. Ланка 6 - кривошип KL.
Кривошип обертається навколо нерухомої осі, що проходить через точ-
ку К перпендикулярно до площини креслення. Величина і напрямок v L нам вже відомі, тому
![]()
Напрямок
![]() показаний на
кресленні
(рис.33).
показаний на
кресленні
(рис.33).
Задача 4. Для заданого положення механізму знайти швидкості точок А, В, С та кутові швидкості всіх ланок механізму, якщо відома кутова швидкість кривошипа ОА (рис.65-94).
Приклад виконання задачі 4.
Дана схема механізму (рис.64).
Вихідні дані: ОА=40см; АВ=80см; ВС=25см; г=15см; едм=2 с-1.
1. Визначаємо швидкість точки А. Величина швидкості дорівнює
![]()
![]()
Швидкість
спрямована перпендикулярно до кривошипа О А.
2. Ланка АВ здійснює плоскопаралельний рух. Для визначення швидкості точки В побудуємо миттєвий центр швидкостей ланки АВ. Швидкість точки В спрямована горизонтально. Побудуємо перпендикуляри до швидкостей точок А та В у цих точках, знайдемо точку перетину цих перпендикулярів – М1. Це і буде миттєвий центр швидкостей ланки АВ. Якщо використаємо властивість величин швидкостей тіла при плоскопаралельному русі знайдемо vВ
![]() ,
,
звідки
![]() .
.
Знайдемо відрізки АМ1 та ВМ1:
![]()
Таким чином,

![]()
Обчислимо vВ :
![]()
Спрямована швидкість
![]() по
горизонталі ліворуч (рис.64).
Кутова
по
горизонталі ліворуч (рис.64).
Кутова
швидкість
ланки АВ
дорівнює:
![]()
та спрямована перпендикулярно площині креслення від спостерігача.

Рис.64
Знайдемо швидкість точки С , що належить колесу. Колесо здійснює плоскопаралельний рух та котиться без ковзання., тому миттєвий центр швидкостей колеса знаходиться в точці дотику колеса та нерухомої поверхні – точці М2.
Тоді
![]()
звідки
![]() .
.
СМ2 знаходимо за теоремою косинусів:
![]()
Тоді
![]()
Рис.65
|
Вар. 1
|
|
Рис. 66 |
Вар. 2 |
|
Рис.67
|
Вар. 3 |
|
Рис.68
|
Вар. 4 |
|
Рис.69 |
Вар. 5 |
|
Рис.70
|
Вар. 6 |
|
Рис.71
|
Вар. 7 |
|
Рис. 72 |
Вар. 8 |
|
Рис.73
|
Вар. 9 |
|
Рис.74
|
Вар. 10 |
|
Рис.75
|
Вар. 11 |
|
Рис. 76 |
Вар. 12 |
|
Рис.77 |
Вар. 13 |
|
Рис.78
|
Вар. 14 |
|
Рис.79
|
Вар. 15 |
|
Рис.80
|
Вар 16 |
|
Рис.81 |
Вар. 17 |
|
Рис.82 |
Вар. 18 |
|
Рис.83 |
Вар. 19 |
|
Рис.84
|
Вар. 20 |
|
Рис.85
|
Вар. 21 |
|
Рис.86 |
Вар. 22 |
|
Рис.87 |
Вар. 23 |
|
Рис.88 |
Вар. 24 |
|
Рис.89
|
Вар. 25 |
|
Рис.90
|
Вар. 26 |
|
Рис.91
|
Вар. 27 |
|
Рис.92
|
Вар. 28 |
|
Рис.93 |
Вар. 29 |
|
Рис.94
|
Вар. 30 |
|



























































Спрямована
швидкість
![]() перпендикулярно
відрізку
СМ2,
як показано
на
рис.64.
перпендикулярно
відрізку
СМ2,
як показано
на
рис.64.
Кутова швидкість колеса дорівнює
![]()
і спрямована перпендикулярно площині креслення до спостерігача (рис.64).
Задача 5. Для заданого положення механізму знайти швидкості та прискорення точок В та С (рис.96–62).
Приклад виконання задачі 5.
Дана схема механізму (рис.95).
Вихідні дані: 0А=10см; АВ=60 см; АС = 20 см; со 0А= 1,5 с-1;εОа=2 с-2.
Визначаємо швидкості точок А, В, С.Величина швидкості точки А
дорівнює
![]()
Ш видкість
видкість
![]() спрямована
перпендикулярно до
кривошипа ОА,
як
показано на кресленні (рис.95).
спрямована
перпендикулярно до
кривошипа ОА,
як
показано на кресленні (рис.95).
Ланка АВ здійснює плоско-паралельний рух, тому для знаходження швидкостей точок В та С потрібно побудувати миттєвий центр швидкостей.
Побудуємо перпендикуляри до швидкостей точок А та В у цих точках, знайдемо точку М - миттєвий центр швидкостей ланки АВ. Величини швидкостей точок В та С визначаються з співвідношень
Р![]() ис.
95
Звідки
ис.
95
Звідки
![]()
Знаходимо AM, BMта CM:

Отже, величини швидкостей дорівнюють

Вектори
![]() спрямовані
відповідно перпендикулярно ВМ
та
CM
і
спрямовані
відповідно перпендикулярно ВМ
та
CM
і
орієнтовані так само, як вектор vA .
Кутова швидкість тіла АВ спрямована перпендикулярно площині креслення від спостерігача, а її величина дорівнює
![]()
2. Визначаємо прискорення точок А, В, С.
Рис. 96
|
Вар. 1 |
|
Рис. 97
|
Вар. 2 |
|
Рис. 98
|
Вар. 3 |
|
Рис. 99
|
Вар. 4 |
|
Рис. 100
|
Вар. 5 |
|
Рис. 101
|
Вар. 6 |
|
Рис. 102
|
Вар. 7 |
|
Рис. 103
|
Вар. 8 |
|
Рис. 104
|
Вар. 9 |
|
Рис. 105
|
Вар. 10 |
|
Рис. 106
|
Вар. 11 |
|
Рис. 107
|
Вар. 12 |
|
Рис. 108
|
Вар. 13 |
|
Рис. 109
|
Вар. 14 |
|
Рис. 110
|
Вар. 15 |
|
Рис. 111
|
Вар. 16 |
|
Рис.112
|
Вар. 17 |
|
Рис. 113
|
Вар. 18 |
|
Рис. 114
|
Вар. 19 |
|
Рис. 115
|
Вар. 20 |
|
Рис. 116
|
Вар. 21 |
|
Рис.117
|
Вар. 22 |
|
Рис. 118
|
Вар. 23 |
|
Рис. 119
|
Вар. 24 |
|
Рис. 120
|
Вар. 25 |
|
Рис. 121
|
Вар. 26 |
|
Рис.122
|
Вар. 27 |
|
Рис. 123
|
Вар. 28 |
|
Рис. 124
|
Вар. 29 |
|
Рис. 125
|
Вар. 30 |
|














































Прискорення точки А складається з обертального та доосьового прискорень:

Вектор
![]() спрямований
перпендикулярно до кривошипа ОА
в
бік, протилежний
швидкості,
тому що кривошип ОА
обертається
уповільнено (рис.126).
спрямований
перпендикулярно до кривошипа ОА
в
бік, протилежний
швидкості,
тому що кривошип ОА
обертається
уповільнено (рис.126).
Вектор
![]() спрямований
від точки А
до
О.
спрямований
від точки А
до
О.
Тіло АВ здійснює плоскопаралельний рух. Обравши полюс в точці А, на підставі формули Рівальса виразимо прискорення точки В:
![]()
або (5.1)
![]()
Величина доосьового прискорення точки В дорівнює:
![]()
Вектор
![]() спрямований
по прямій
АВ від
точки В
до
полюса А (рис.126).
спрямований
по прямій
АВ від
точки В
до
полюса А (рис.126).
Величина обертального
прискорення точки
В невідома,
тому що кутове прискорення
Отже,
вектор
Будемо
вважати, що В
точці В
побудуємо
вектори
|
Рис.126
|

|
( 5.2 ) ( 5.3 ) |
З рівняння (5.2)
знаходимо
![]()
![]()
Знак « - » означає,
що
![]() спрямоване
вертикально вверх, а не вниз,
як ми припускали.
спрямоване
вертикально вверх, а не вниз,
як ми припускали.
3 рівняння (5.3) знаходимо
![]()
Позитивний
знак означає, що
![]() спрямоване
так, як показано на рисунку.
За напрямком
цього прискорення відносно полюса А
визначається
напрямок кутового прискорення
спрямоване
так, як показано на рисунку.
За напрямком
цього прискорення відносно полюса А
визначається
напрямок кутового прискорення
![]() цей вектор перпендикулярний
площині креслення
та спрямований
до спостерігача (протилежно
цей вектор перпендикулярний
площині креслення
та спрямований
до спостерігача (протилежно
![]()
Знайдемо величину
![]()
Знайдемо величину прискорення точки С:
![]()
або
![]() (5.4)
(5.4)
На рисунку в точці
С будуємо![]() Знаходимо
Знаходимо
![]()
Відповідно
до напрямку
![]() вектор
вектор
![]() спрямований
перпендикулярно АС. Вектор
спрямований
перпендикулярно АС. Вектор
![]() спрямований вздовж АС
від
точки С до
полюса А.
спрямований вздовж АС
від
точки С до
полюса А.
Проектуємо обидві частини рівняння (5.4) на осі х та у.
![]()
Величина прискорення точки С дорівнює
![]()
Задача 6.
За заданим
рівнянням руху тіла D
та відносного
руху
точки М
по
відношенню до тіла D
визначити
для часу
![]() абсолютну
швидкість та
абсолютне прискорення точки
М
(рис.
129–158).
абсолютну
швидкість та
абсолютне прискорення точки
М
(рис.
129–158).
Приклад виконання задачі 6.
Дана схема механізму (рис.127).
Вихідні дані:![]()
1. Зв'яжемо рухому
систему координат з тілом D.
Ця система
обертається навколо нерухомої осі за
законом
![]() Введемо вісь Z,
спрямовану
за віссю обертання в той бік, звідки
відлік кута
Введемо вісь Z,
спрямовану
за віссю обертання в той бік, звідки
відлік кута
![]() видно проти
годинникової стрілки (рис. 127).
видно проти
годинникової стрілки (рис. 127).
Обчислимо кутову швидкість та кутове прискорення тіла
![]()
Для часу
![]()
![]()
Позитивні знаки
![]() вказують, що
вказують, що![]() спрямовані вздовж осі z
в бік позитивного
напрямку осі z
(рис. 127).
спрямовані вздовж осі z
в бік позитивного
напрямку осі z
(рис. 127).
Відносний рух точки відбувається за колом радіуса R за законом
.
Знайдемо положення
точки на траєкторії на момент часу
![]()
Для цього обчислимо кут між радіусами, проведеними в точки О та Mt:
![]()
На траєкторії покажемо точку М.