

Обеспечение точного расчетного движения подъемных сосудов в соответствии с тахограммой их движения в шахтном стволе.
Защита подъемной машины включением предохранительного торможения.
Блокировка пуска подъемной машины.
В рамках обеспечения точного расчетного движения подъемного сосуда в шахтном стволе должны выполнятся следующие требования:
Скорость подхода клети к приемной площадке и скорость выхода скипа из разгрузочных кривых не должна превышать 1 м/сек.
Скорость перемещения груженого скипа в разгрузочных кривых не должна превышать 0,6 м/сек. Защита подъемной машины включением предохранительного торможения должна выполнятся следующих случая:
При пере подъеме сосуда на 0,5 м. выше уровня приемной площадки.
При превышении на 15%. номинальной скорости подъема.
При подходе сосуда к приемной площадке со скоростью выше чем 1,5м/сек при спуске-поъеме груза и более 1 м/сек при спуске-подъеме людей.
При провисании или напуске струны каната.
При зависании сосуда в любом месте ствола.
При недопустимом износе тормозных колодок.
При снижении давления в цилиндрах предохранительного тормоза и сети питания тормозной системы.
При исчезновении напряжения в цепях управления.
При повреждении электронных ограничителей скорости.
Системы автоматизации шахтных подъемных установок должны обеспечивать блокировку запрещающую:
Включение подъемной машины после пере подъема или зависания сосуда в сторону увеличения пере подъема или напуска каната.
Снятие предохранительного тормоза, если рукоятка рабочего тормоза не поставлена в положение «заторможено», а рукоятка управления приводом подъемной машины не поставлена в нулевое положение.
Работу подъема при открытом положении предохранительных решеток на приемных площадках.
16. Принцип работы аппаратуры «азк-1» задания и контроля параметров шахтного подъема.
Для задания и контроля точного расчетного движения подъемного сосуда в шахтном стволе
применяется аппаратура АЗК-1, структурная схема которой показана на рис.66.
Аппарат состоит из системы редукторов, которые имеют общий привод от вала барабана. Функциональные возможности системы автоматического задания и контроля основных параметров шахтного построены в зависимости от длины каната, именно поэтому аппарат АЗК-1 кинематически связан с барабаном.
Программно скорость движения подъемного сосуда задается профильными (ретрадирующими) дисками, которые приводятся во вращение отдельными редукторами.
Программа движения подъемного сосуда сразу записана на два таких диска, Но при считывании они вращаются в разные стороны («Вперед» и «Назад»). Это объясняется тем, что при реверсе барабана реверсируется и вращение программного диска, при этом программа, записанная только на одном диске, будет считываться в обратном порядке. Для того чтобы этого не произошло, эта программа реверсивно записывается на два диска, с каждого из которых она считывается при определенном вращении барабана.
Кроме того, парные диски сдвоены. На одной из пар этих дисков задается скоростная программа рабочего режима, а на другой паре записан скоростной режим «ревизии ствола», которому ежесуточно подвергается шахтная подъемная установка и все сопутствующие оборудование. Включение пары этих дисков происходит с помощью электромагнитной муфты ЭМ1 или ЭМ2.
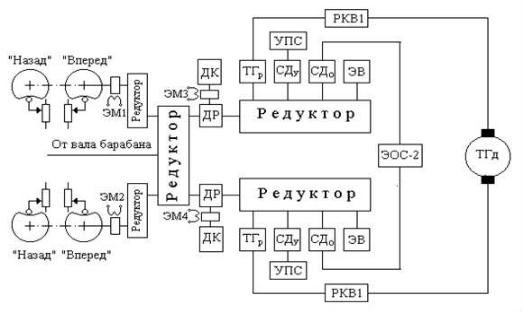
Рис 66. Схема аппарата задания и контроля (АЗК-1).
Настройка системы по длине каната (по пути перемещения подъемного сосуда) происходит от двигателя коррекции ДК через дифференциальный редуктор ДР. Эта настройка необходима после очередного ежегодной подстройки длины подъемного каната, которая происходит после обрубки его мерного куска для проверки прочности на разрыв. После этой обрубки длину каната восстанавливают за счет смотки с барабана запасных витков. Все это требует маневровых операций, которые выполняются двигателями коррекции. Включение этих двигателей производится через электромагнитные муфты ЭМ3 и ЭМ4.
Для повышения надежности контролирующие функции этого аппарата выполнены в дублированном варианте. Аппаратура, реализующая эти функции, кинематически через дифференциальный ДР и раздаточный редуктор связана с подъемным бараном. Раздаточный редуктор одновременно приводит в действие тахогенератор ТГр, два сельсина датчика СДу и СДо, а также этажный выключатель ЭВ.
Тахогенератор ТГр совместно с тахогенератором подъемного двигателя ТГд подключены на вход реле РКВ1, контролирующего целостность кинематической цепи подъемной установки и аппарата АЗК1. В случае потери этой целостности (поломка шестерни, муфты или вала редуктора подъемной машины) реле РКВ1 будет получать разные сигналы с тахогенераторов ТГр и ТГд. В результате этого оно разомкнется и своими нормально закрытыми контактами включит привод аварийного тормоза.
Сельсин датчик Сду приводит в действие указатель положения подъемного сосуда УПС (клети или скипа). Этот указатель непрерывно показывает машинисту подъемной машины положение подъемного сосуда в стволе шахты, в то время как другой указатель ЭВ показывает положение клети только на конкретном горизонте «этаже» шахты.
Сельсин датчик Сдо приводит в действие программные (ретродирующие) диски аппарата задания скорости в устройстве ЭОС2. Автоматическое включение предохранительного торможения должно происходить в случаях, описанных вышеприведенными требованиями. В частности, это должно произойти, если скорость движения подъемного сосуда будет отличаться в обе стороны на 15 % от заданного значения. Для контроля такой ситуации в аппарате АЗК-1 используют электронный ограничитель скорости ЭОС2.
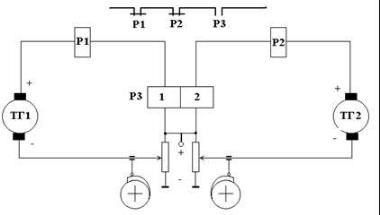
Электрическая схема этого устройства показана на рис. 66.
Принципиально электронный ограничитель скорости состоит из двух датчиков скорости (тахогенераторов ТГ1 и ТГ2), двух задатчиков скорости (потенциометров, движки которых перемещаются профильными дисками). Скорость вращения этих дисков задается сельсинами- датчиками Сдо аппарата АЗК-1. В состав ЭОС2 входят катушки двух реле Р1 и Р2. Каждое из этих реле запитано от двух источников соответствующего тахогенератора задающего потенциометра.
Причем эти источники напряжения включены встречно, поэтому пока фактическая скорость движения подъемного сосуда не отклоняется от заданной величины более чем на 15 %, реле Р1 и Р2 находятся в отключенном состоянии. Если же это условие нарушается, то одно из реле срабатывает и своими контактами разрывает цепь питания двигателя подъема, после чего двигатель отключается и одновременно включается предохранительный тормоз.
Тот же эффект наступает в случае разрыва хотя бы одной из цепей питания катушек реле Р1 или Р2, которые предназначены для контроля целостности цепей питания ограничителя скорости, В этом случае обесточится хотя бы одна из катушек двухкатушечного реле РЗ, его контакты так же разомкнут цепь питания двигателя подъема и замкнут цепь питания предохранительного тормоза.
Тормозная система играет значительную роль в технологическом процессе работы шахтного подъема, поэтому системы автоматизации этого подъема должны учитывать особенности работы этого устройства. Основной особенностью устройства является то, что тормозная система шахтной подъемной машины работает в двух режимах: рабочем и аварийном.