

13. Основные требования к системам автоматического обеспечения безопасной работы подземного рельсового транспорта. Структурная схема аппаратуры «абсс».
Аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Структура этой аппаратуры показана на рис. 63. Эта аппаратура состоит из двух полукомплектов: передающего, который устанавливается на электровозе и приемного, который устанавливается на стрелочном переводе. Передающий полукомплект устанавливается на электровозе и через приемопередатчик включает датчики запроса ДЗ. Эти же датчики могут быть включены вручную непосредственно с места их расположения в приемном полукомплекте.
Приемный полукомплект состоит из устройства управления УУ, к которому непосредственно подключаются все группы датчиков. Этот блок управляет стрелками и огнями светофора в соответствии с выше изложенными требованиями через исполнительные механизмы ИМ. Выходные сигналы управления непосредственно воздействуют на исполнительные устройства ИМ, которые включают или выключают приводы стрелок и соответствующие огни светофоров
Требования к системам автоматической блокировки и световой сигнализации рельсового транспорта Системы автоматической блокировки и световой сигнализации рельсового транспорта должны обеспечивать:
1. Автоматическое переключение зеленого сигнала светофора на красный при срабатывании датчика положения.
2. Автоматический перевод всех стрелок на выбранном маршруте при срабатывании датчика запроса, если выбранный маршрут свободен.
3. Автоматическое переключение нормально горящего красного сигнала светофора на мигающий красный
при срабатывании датчика запроса.
4. Автоматическое включение мигающего зеленого сигнала светофора, если не все стрелки переведены на выбранном маршруте.
5. Автоматическое переключение красного сигнала светофора на зеленый при срабатывании датчика отбоя.
6. Невозможность одновременного задания опасных маршрутов .
.
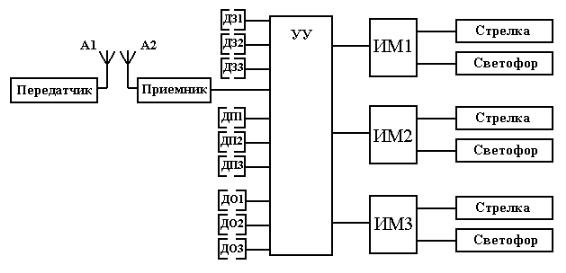
Рис.63. Структурная схема аппаратуры АБСС-1.
Все перечисленные требования реализуются в аппаратуре типа «АБСС-1» или «Нерпа».
Требование к системам автоматизации:
Автоматический пуск и разгон без проскальзывания ходовых колес электровоза шахтного состава.
Автоматическое регулирование скорости движения шахтного состава в соответствии с профилем пути.
Автоматический и аварийный останов шахтного состава при нажатии кнопку (стоп) при минимальном тормозном пути.
Обеспечение безопасности движения состава по опасным участкам маршрутам.
Участок одноколейной трассы по которому совершается встречное движение.
Опасные участки всегда оборудуются светофорами (кр и зл) На стрелках устанавливаются световые сигналы положение стрелок (белый, синий)
Система автоматики предусматривает установки след датчиков:
ДП -датчики положения стрелки
ДЗ -датчик запроса маршрута
ДО- датчики отбоя (устанавливаются на макс длине состава от стрелки)
АБСС – 1 - (аппаратура автоматической блокировка и управления сигналами свет).