

3. Проектирование кулачкового механизма
Задача
проектирования кулачкового механизма
состоит в
построении
профиля кулачка по заданным законам
движения кулачка и толкателя
(кинематический синтез) и динамическим
условиям (минимальному углу передачи
движения
 ).
Углом передачи движения γ
называется угол между направлениями
абсолютной и относительной скоростей
толкателя.
).
Углом передачи движения γ
называется угол между направлениями
абсолютной и относительной скоростей
толкателя.
3.1. Графическое интегрирование по методу хорд
Закон
движения ведомого звена кулачкового
механизма задан графиком ускорения
a=a(t)
(рис. 7) или аналогом ускорений
 .
Для
кулачка с качающимся толкателем задано
.
Для
кулачка с качающимся толкателем задано
 или
или

Для построения профиля кулачка нужно иметь закон изменения перемещения толкателя по времени, который можно найти, дважды графически интегрируя график a=a(t).
Порядок графического интегрирования:
В произвольном масштабе Ка и масштабе Kφ строим диаграмму ускорений толкателя.
где φу – угол удаления в градусах;
ω – угловая скорость кулачка;
l – отрезок оси абсцисс, изображающий угол φу , в мм.
При
построении диаграммы ускорений следует
учитывать, что отношение ординат h´
и h´´,
соответствующих максимальным значениям
ускорений при удалении и возвращении,
связано зависимостью

Углы φу и φв делим на равные части таким образом, чтобы момент времени, при котором a=0, совпадал с одним из делений. Если
 ,
то
промежутки времени 0-1,
1-2 …
на участке удаления могут быть не равны
промежуткам времени на участке
возвращения.
,
то
промежутки времени 0-1,
1-2 …
на участке удаления могут быть не равны
промежуткам времени на участке
возвращения.В серединах промежутков 0-1, 1-2, 2-3 … проводим ординаты до пересечения с кривой графика и полученные точки сносим на ось ординат. Получаем ряд точек 1´, 2´, 3´ …
На участке 1-2, где кривая ускорений имеет экстремум, ордината 02´ должна быть подобрана такой, чтобы площадь прямоугольника с высотой 02´ и основанием 1-2 была равна площади фигуры с тем же основанием и ограниченной сверху кривой ускорений. То же относится и к участку 4-5.
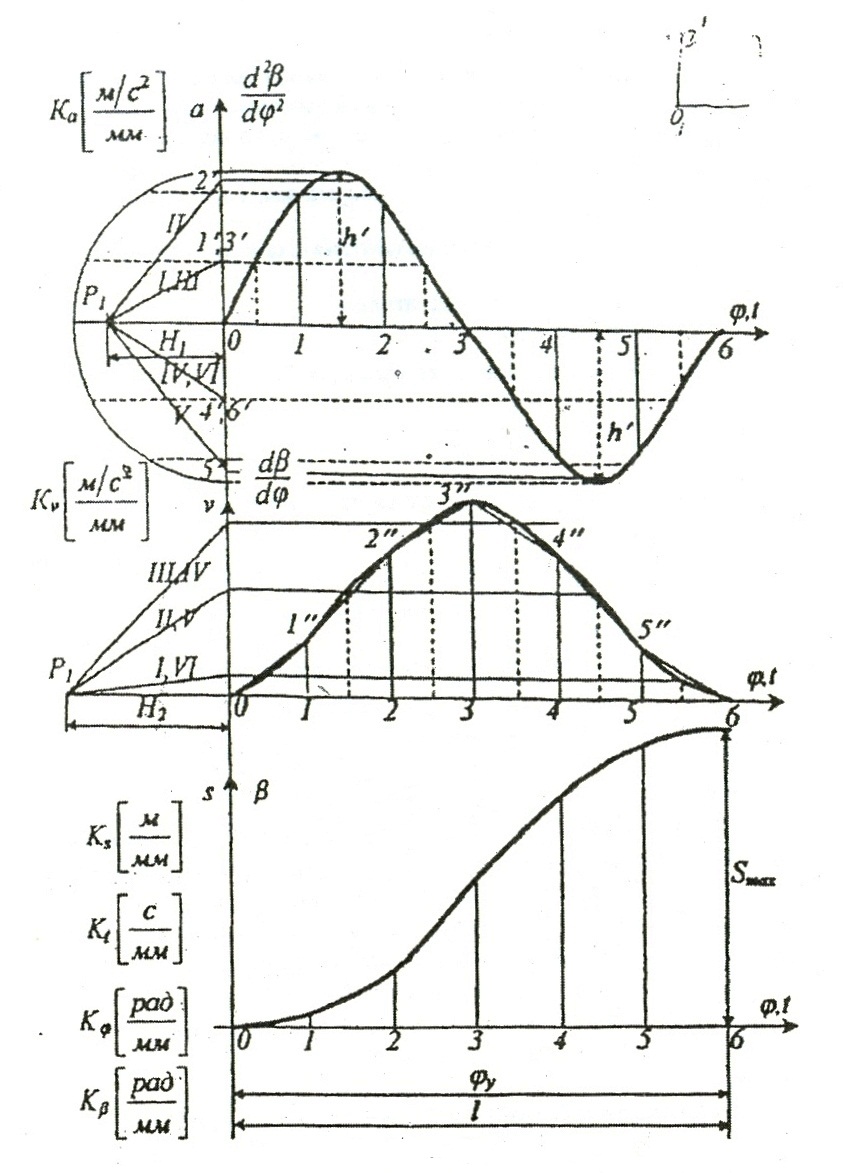
Рис. 7.
Соединяя произвольно взятую на продолжении оси t точку Р1, принимаемую за полюс, с точками 1´, 2´, 3´ получаем лучи I, II, III …
На графике V=V(t) из т. О проводим в интервале 0-1 прямую 0-1'', параллельно лучу 1, в интервале 1-2 - прямую 1''-2'', параллельную лучу II и т.д. Полученная ломаная линия (в пределе кривая) представляет кривую изменения скорости по времени.
Аналогично интегрируя кривую V=V(t), получаем кривую перемещения S=S(t).
Определяем масштабы диаграмм, начиная с масштаба KS.
 – для
кулачкового
механизма с поступательно движущимся
толкателем,
– для
кулачкового
механизма с поступательно движущимся
толкателем,
где h - ход толкателя, м;
Smax – максимальная ордината графика S=S(t).
Для кулачкового механизма с качающимся толкателем определяют масштабы Kβ и KS
 ,
,
 ,
,
где βmax – максимальный угол качания коромысла, в градусах;
lAB – длина коромысла, м.
Примечание:
На рис. 7 показано построение синусоиды. Для этого слева от оси а проводится полуокружность диаметром 2h´, которая затем делится на 6 равных частей. Из точек деления проводятся прямые параллельные оси абсцисс до пересечения с соответствующими ординатами. Найденные таким образом точки принадлежат синусоиде. Аналогично следует строить косинусоиду.
На рис. 7 показано построение графиков движения только для участка удаления.