

2.2 Обладнання і прилади
1 Промисловий робот „МП-11”.
2 Комплект допоміжного устаткування (стіл, підставки, моделі заготовок).
2.3 Порядок виконання роботи
1 Вивчити правила техніки безпеки, перевірити наявність заземлення на устаткуванні, видалити з робочої зони усі сторонні предмети і розписатися в журналі з техніки безпеки.
2 Вивчити пристрій і принцип роботи механізмів ПР „МП-11”.
3 Ознайомитися з порядком налагодження і керуванням ЕЦПП-6030.
4 Ознайомитис із роботою ПР.
2.4 Зміст звіту
1 Найменування і мета роботи.
2 Кінематичні схеми механізмів ПР.
3 Висновки з роботи.
2.5 Контрольні питання
1 До якої системи координат можна віднести структурно - компонувальну схему ПР „МП-11”?
2 Принцип дії модулів ПР „МП-11”.
3 Як регулюється величина відносного переміщення (повороту) модулів
ПР „МП-11”?
4 Як регулюється відносна швидкість переміщення (повороту) виконав-
чих елементів робота?
5 Призначення і складові частини пристрою підготовки повітря.
6 Призначення і складові частини пульта управління ЕЦПП-6030.
Лабораторна робота № 3 Програмування промислового робота рф-202м
Мета роботи – отримання практичних навиків складання програм для роботів і запису програм в пристрій, що запам'ятовує.
Програма робота є послідовністю рухів робота, які він повинен здійснити, щоб виконати поставлену перед ним задачу.
Хай настільному роботу РФ-202М вимагається перенести деталь з крапки А в крапку В. Деталь розташовується на стійці на висоті, відповідній висоті розташування захват робота РФ-202М.
Щоб скласти програму для робота, треба спочатку познайомитися з конструкцією і роботою робота. Особливу увагу слід звернути на рухи, які робот може виконувати, і їх амплітуду. Робот РФ-202М закріплюється на столі, а його руки можуть виконувати п'ять різних незалежних рухів в будь-якій послідовності. Роботу виконуватимемо однією правою рукою.
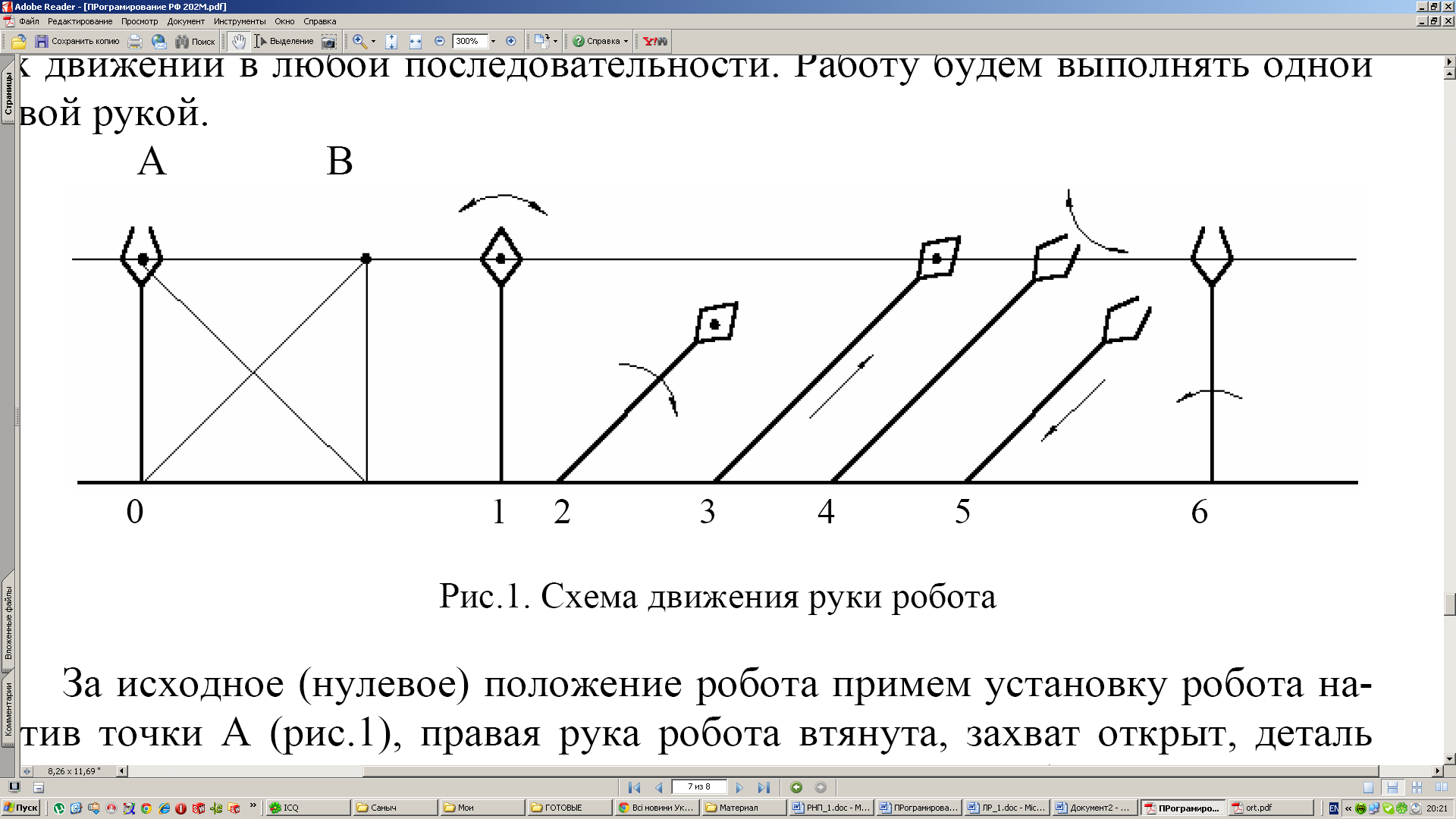
Рисунок 3.1. Схема руху руки робота
За початкове (нульове) положення робота приймемо установку робота напроти крапки А (рис.1), права рука робота втягнута, захват відкрите, деталь розташовується усередині захват, але не затиснена. Тепер, щоб виконати поставлену задачу, робот повинен зробити 6 рухів, показаних на схемі рухів робота і записаних в таблиці.
Робота по перенесенню деталі закінчується після виконання четвертого руху, але правила складання програм для роботів вимагають, щоб останнє положення робота за програмою відповідало початковому. Для цього потрібно зробити два додаткові рухи 5 і 6.
Спираючись на схему рухів робота, записуємо програму робота в таблиці.
Номер руху |
Символ переміщення |
Коментар |
1 |
|
Закриття захвату |
2 |
|
Поворот колони за годинниковою |
3 |
|
Висунення руки |
4 |
|
Відкриття захвату |
5 |
|
Втягування руки |
6 |
|
Поворот колони проти годинникової стрілки |
Складена програма записується в модуль пам'яті системи управління роботом.
Порядок запису програми в пам'ять робота:
1. Включити систему управління.
2. Натиснути кнопку "Включення індикації".
3. Встановити перемикач "Номер програми" в положення 1.
4. При натиснутій кнопці "Стирання" натиснути кнопку "Запис".
5. Натиснути кнопку "Ручний режим".
6. Вивести маніпулятор в початкове положення, натискаючи потрібні кнопки на пульті управління.
7. При натиснутій кнопці "Початок програми" натиснути і відпустити кнопку "Запис". При цьому записуються координати початкової крапки.
8. Записати координати всіх проміжних точок програми. Для цього натискають кнопки відповідних рухів одночасно з кнопкою "Запис".
9. Після кожного руху можна записати час витримки. Для цього після запису руху потрібно натиснути кнопку "Таймер".
10. При натиснутій кнопці "Кінець програми" натиснути і відпустити кнопку "Запис". При цьому записуються координати кінцевої крапки.
Записану в модуль пам'яті програму робот може виконати автоматично. Для цього потрібно перевести систему управління роботом в автоматичний режим, встановити потрібний номер програми і натиснути кнопку "Пуск".
Порядок виконання роботи
1. Познайомитися із змістом методичних вказівок.
2. Вивчити конструкцію і управління роботом РФ-204М.
3. Накреслити схему руху руки робота і записати програму для робота РФ-204М для виконання роботи по перенесенню бобіни із столу А на стіл В.
4. Записати програму в модуль пам'яті робота.
5. Перемкнути систему управління роботом на автоматичний режим.
6. Здійснити роботу по перенесенню бобіни в автоматичному режимі.
7. Скласти звіт про роботу.
При складанні програми для робота РФ-204М треба взяти до уваги, що цей робот підвісного типу і має шостий ступінь рухливості (на відміну від робота РФ-202М) – переміщення маніпулятора по монорельсу управо і вліво на відстань 3 метри.
Звіт про роботу
1. Мета роботи.
2. Схема руху руки робота РФ-204М при перенесенні деталі із столу А на стіл В.
3. Програма роботи робота.
4. Порядок запису програми в пам'ять робота.