

Інститут машинобудування та транспорту
Кафедра технології та автоматизації машинобудування
ЗАТВЕРДЖУЮ
Директор ІнМТ
____________ Ю.А. Бурєнніков
Протокол засідання
Вченої ради ІнМТ
№ від 20__ р.
Лозінський Д.О.
Методичні вказівки до проведення лабораторних робіт
з дисципліни «РОТОБИЗОВАНІ ТЕХНОЛОГІЧНІ КОМПЛЕКСИ»
(електронний варіант)
для студентів напряму підготовки 6.050502 – «Інженерна механіка»
спеціальності 7.05050201 - «Технології машинобудування»
Рекомендовано методичною Завідувач кафедри ТАМ
комісією ІнМТ __________ І.О. Сивак
Протокол засідання Протокол засідання кафедри ТАМ
№ від 20___ р. № від 20___ р.
Голова методичної комісії
____________ Ю.А. Бурєнніков
Вінниця 201___
Лабораторна робота № 1 Дослідження конструкції та функціональних можливостей промислового робота рф-202м
Мета роботи – вивчення конструкції і принципу дії робота РФ-202М.
Універсальний робот РФ-202М призначений для автоматизації процесів завантаження-розвантаження верстатів типу пресів і штампів. При цьому робот здійснює захват, перенесення і установку заготівки на верстат, а після обробки зняття готової деталі. Для цього рука робота оснащена кліщовим захопленням.
Технічна характеристика робота РФ-202М
Вантажопідйомність на одну руку 10 Н
Тип приводу пневматичний
Число ступенів рухливості 5
Точність позиціонування + 0,5 мм
Робочий тиск повітря 0,4…0,6 мПа
Висунення руки 200 мм
Під'їм колони 20 мм
Поворот колони 90є; 180є
Обертання руки навколо осі 180є
Робот РФ-202М (як і всі роботи) складається з двох частин: системи управління і маніпулятора, який звичайно називають роботом.
Маніпулятор робота є механічною системою, що здійснює маніпуляції з предметами, один з елементів якої нагадує руку людини.

Рис. 1. Структурно-кінематична схема робота РФ-202М
На рис.1 показана структурно-кінематична схема маніпулятора робота РФ-202М. Вона дає наочне уявлення про кінематичні можливості робота. Робот РФ-202М має 5 ступенів рухливості, тобто може скоювати 5 різних незалежних рухів.
Робот РФ-202М дворукий. Руки робота за допомогою кронштейнів закріплені на колоні, що спирається на підставу робота. Підстава робота закрити кожухом, під яким розміщені 2 пневмоциліндра, повертаючі колону робота за годинниковою стрілкою і проти, а також електроклапани, що управляють подачею стислого повітря у все пневмоциліндри. На кінцях рук закріплені захват кліщового типу.
Всі рухи робот здійснює за рахунок енергії стислого повітря від пневматичних виконавчих механізмів. Висунення рук, під'їм колони, поворот колони, закриття захоплень здійснюється від пневмоциліндров з прямолінійним рухом поршня, а обертання рук – від пневмодвігателей, вал яких скоює неповнообертові обертальні рухи.

Рис. 2. Схема пневмопривода робота РФ-202М
На рис. 2 показана пневматична схема приводу робота. Стисле повітря через вхідний штуцер 1, замочний вентиль 2, влаговыдділювач 3, регулятор тиску 4, маслоразпилювач 6 по воздуховодам (трубкам) поступає до розподільних пристроїв 7. Всі ці елементи об'єднані в один блок – блок підготовки стислого повітря. Розподільники направляють стисле повітря в пневмоциліндри.
Влагоотделітель видаляє з повітря вологу. За допомогою регулятора тиску виробляється настройка (уручну) тиску стислого повітря, що поступає в пневмоциліндри. Маслораспилітель насищає повітря маслом (1…2 краплі на 1м3 повітря), необхідним для мастила елементів, що труться, в пневмоциліндрах. Контроль тиску стислого повітря, що поступає в пневмоциліндри, здійснюється візуально по манометру 5.
Блок підготовки стислого повітря виконується автономно і встановлюється поблизу маніпулятора.
Розподільники стислого повітря 7 клапанного типу з електроуправлінням здійснюють відкриття або закриття доступу стислого повітря в робочі порожнини пневмоциліндров. На кожен рух в роботі встановлений автономний електроклапан. Всі вони розміщуються в підставі маніпулятора.
У даній схемі кожен електроклапан забезпечений дроселем на виході, регульованим поворотом регулювального гвинта. Дроселем можна змінювати витрату повітря на вході і виході з пневмоциліндров, а значить, і швидкість виконання кожного руху.
Гальмування пневмоциліндров при підході до кінцевого положення, щоб не було ударів, здійснюється автоматично за рахунок того, що дроселює стислого повітря на вході і виході з пневмоциліндров.
Поворот руки робота навколо її осі походить від пневмодвигуна 8 (рис.2), висунення руки – від пневмоциліндра двосторонньої дії 9, закриття захват від пневмоциліндра односторонньої дії 10 через важелі, під'їм колони – від пневмоциліндра 11, поворот колони – від двох пневмоциліндров 12.
Система управління робота РФ-202М циклова і конструктивно оформлена у вигляді ящика з відкидною кришкою. На відкидній кришці розміщений пульт управління роботом.
Пристрій управління може працювати в двох режимах: у режимі навчання (ручний режим) і в автоматичному режимі.
У ручному режимі оператор виробляє переміщення захватного пристрою маніпулятора за допомогою кнопок на пульті управління окремо по кожному ступеню рухливості.
У автоматичному режимі відробіток всієї програми виробляється без втручання оператора.
Пульт управління призначений для управління рухомими ланками маніпулятора, (з метою перевірки працездатності робота) і набору програм в пристрій для подальшого виконання технологічних задач, що запам'ятовує.
На лівій стороні пульта розміщені кнопки управління рухом лівої і правої руки робота. Біля кожної кнопки намальоване символічне позначення. Розшифруємо ці позначення:
![]() – висунення і втягування руки;
– висунення і втягування руки;
![]() – поворот
колони за годинниковою стрілкою і проти;
– поворот
колони за годинниковою стрілкою і проти;
![]() – обертання
руки навколо осі за годинниковою стрілкою
і проти;
– обертання
руки навколо осі за годинниковою стрілкою
і проти;
![]() – закриття
і відкриття захват;
– закриття
і відкриття захват;
![]() – під'їм
і опускання колони.
– під'їм
і опускання колони.
Внизу пульта розміщені кнопки управління таймером, використовуваним для завдання часу витримки захват після виконання будь-якого руху: "СКИДАННЯ" – переводить таймер в нульовий стан.
![]() – кожне
одноразове натиснення кнопки задає час
витримки 0,5 секунди.
– кожне
одноразове натиснення кнопки задає час
витримки 0,5 секунди.
У правій частині панелі розташовані органи управління, використовувані в режимі навчання (записи програми):
![]() – початок
програми;
– початок
програми;
![]() – кінець
програми
– кінець
програми
![]() – запис;
– запис;
СТИРАННЯ – призначено для очищення пристрою, що запам'ятовує;
ВКЛ. ІНДИКАЦІЇ – служить для індикації стану таймера і режимів роботи;
![]() – режим
навчання (ручний режим);
– режим
навчання (ручний режим);
![]() – автоматичний
режим;
– автоматичний
режим;
КОМАНДИ 1,2,…,7 – призначені для управління технологічним устаткуванням.
Пристрій робота, що запам'ятовує, призначений для запису, зберігання і вибірки програм. У пристрої, що запам'ятовує, може зберігатися до дев'яти програм. На горизонтальній панелі системи управління розташовані перемикач, індикатор номера програми і кнопка "КОНТР. БАТ." (контроль батареї), натисненням якої перевіряється наявність автономного живлення у пристрою, що запам'ятовує.
Порядок виконання роботи
1. Познайомитися з конструкцією маніпулятора робота.
2. Вивчити призначення кнопок на пульті управління.
3. Включити систему управління і виробити пробні рухи маніпулятора по всіх ступенях рухливості.
Звіт про роботу
1. Мета роботи.
2. Призначення промислового робота РФ-202М
3. Структурно-кінематична схема робота РФ-202М.
4. Схема пневмопривода робота з вказівкою всіх елементів.
5. Технічна характеристика робота.
Лабораторна робота 3
Дослідження конструкції та функціональних можливостей промислового робота МП-11
Мета роботи: вивчити конструкцію промислового робота (ПР) ПР „МП-11”.
2.1 Основні теоретичні відомості
2.1.1 Призначення і складові частини
Промисловий робот „МП-11” призначений для виконання операцій транспортування й орієнтації деталей при автоматизації технологічних процесів і складається з дворукого маніпулятора з чотирма ступенями рухливості і пристрою циклового програмного керування (ЕЦПП-6030). Загальний вигляд ПР “МП-11” подано на рисунку 1.1, а його технічна характеристика у таблиці 3.1.
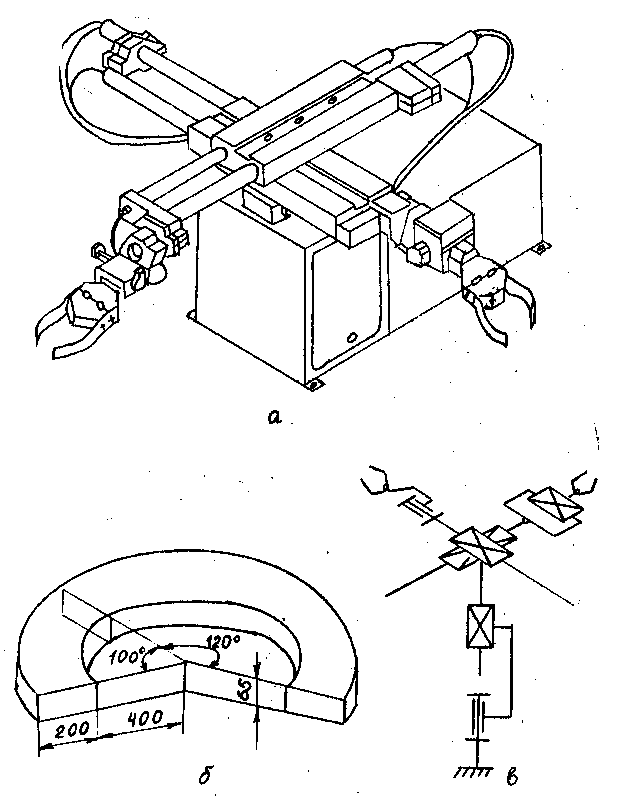
а - загальний вигляд; б - форма зони обслуговування;
в - структурно - компонувальна схема
Рисунок 2.1 - Промисловий робот „МП-11”
Таблиця 2.1 - Технічна характеристика ПР „МП-11”
Параметр |
Розмір |
Номінальна вантажопідйомність, кг |
0,5 х 2 |
Максимальна розмір горизонтального переміщення, мм |
200 |
Максимальний кут повороту в горизонтальній площині, град |
120 |
Максимальний розмір вертикального переміщення, мм |
65 |
Максимальна величина зсуву, мм |
25 |
Максимальний кут повороту схопу навколо подовжньої осі, град |
180 |
Максимальна абсолютна точність позиціювання, мм |
0,1 |
Час, с: висування рук (максимальне) повороту рук в горизонтальній площини вертикального переміщення зрушення схопу повороту (ротації) схопу стиску (розтиснення) схопу |
0,8 0,85 0,5 0,35 0,4 0,35 |
Кут між руками, град |
20..100 |
Робочий тиск пневмосистеми, мПа |
0,4..0,5 |
Тип системи управління |
Цикловий |
Кількість команд управління маніпулятором |
12 |
Кількість технологічних команд |
6 |
Кількість ланок маніпулятора, керованих за: шляховим принципом шляховим і тимчасовим принципом |
4 2 |
Кількість програмувальних витримок часу |
1 |
Діапазон регулювання програмувальної затримки, с |
0..0,7 |
Кількість кадрів у програмі |
30 |
Напруга живлення частотою 50 Гц, Вольт |
220+ 22 −33 |
Потрібна потужність, кВт |
0,2 |
Габарити, мм |
990 х 990 х 445 |
Маса, кг |
70 |