

3.4Регулювання швидкості аеп з пч з кв
В АЕП
з перетворювачем частоти та регулюючим
випрямлячем регулювання швидкості
![]() здійснюється в широкому діапазоні, при
цьому забезпечується достатньо високі
показники якості. Регулювання чачтоти
здійснюється в широкому діапазоні, при
цьому забезпечується достатньо високі
показники якості. Регулювання чачтоти
![]() здійснюється впливом на АІ
з допомогою БКІ
при одночасному впливові на КВ
за допомогою БКВ
відповідно з законом регулювання. При
цьому можливе двозонне регулювання.
Але для механізмів з Mc=const
, та для механізмів з лінійно зростаючою
механічною характеристикою регулювання
вверх обмежено тим що для цього необхідно
одночасно з збільшенням частоти відносно
здійснюється впливом на АІ
з допомогою БКІ
при одночасному впливові на КВ
за допомогою БКВ
відповідно з законом регулювання. При
цьому можливе двозонне регулювання.
Але для механізмів з Mc=const
, та для механізмів з лінійно зростаючою
механічною характеристикою регулювання
вверх обмежено тим що для цього необхідно
одночасно з збільшенням частоти відносно
![]() збільшити напругу, у результаті чого
може трапитися пробій ізоляції.
Регулювання
вверх застосовується значно рідше ніж
в діапазоні вниз і в незначних межах.
збільшити напругу, у результаті чого
може трапитися пробій ізоляції.
Регулювання
вверх застосовується значно рідше ніж
в діапазоні вниз і в незначних межах.
В загальному випадку сімейство механічних характеристик буде мати вигляд:
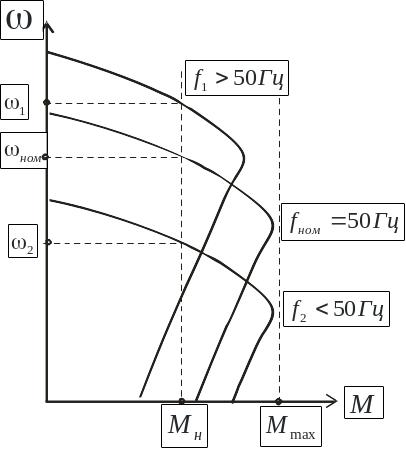
Рис. 3.23 Механічні характеристики АЕП з ПЧ з КВ
Показники якості регулювання :
- Стабільність при частотному регулюванні є високою тому що характеристики в робочій частині мають однакову жорсткість.
- Плавність практично не обмежена.
- Висока економність,
але при глибокому регулюванню вниз від
основної частоти при якому потрібно
значно зменшити кут керування
![]() випрямляча при цьому коефіцієнт
потужності приводу в цілому може
здаватися дуже низьким.
випрямляча при цьому коефіцієнт
потужності приводу в цілому може
здаватися дуже низьким.
- Регулювання в основному здійснюється при Мс-const на валу двигуна.
- Направлення двозонне застосовується регулювання вниз .
- Діапазон регулювання Д=100:1.
3.4.1Пуск в аеп з пч з кв
Пуск починається
при зніженій напрузі та при мінімальній
частоті, що відповідно забезпечує
відсутність кидка струму чи мінімізацію
струму і одночасно великі пускові
моменти. При цьому інвертор працює в
великими періодами комутації силових
ключів, а КВ
з кутом керування
![]() .
Енергетична ефективність пуску в такій
системі зменшується за рахунок того
що на початку пуску привод споживає
велику кількість реактивної складової.
.
Енергетична ефективність пуску в такій
системі зменшується за рахунок того
що на початку пуску привод споживає
велику кількість реактивної складової.
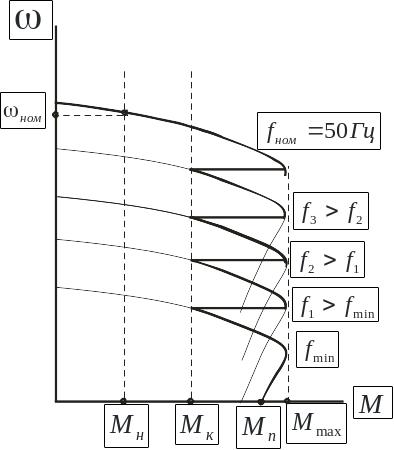
Рис. 3.24 Діаграма пуску в АЕП з ПЧ з КВ
3.4.2Гальмування в аеп с пч с кв
Переваги цієї системи: можливість гальмування в рекуперативному режимі, що зв’язано з наявністю в структурі УВ, якій має двосторонню провідність, що дозволяє рекуператувати електричну енергію в мережу. При цьому процес рекуперативного гальмування реалізується наступним чином: в момент початку гальмування частота і напруга по відношенню до номінального зменшується. При цьому стрибок частота та напруга достатні для того, щоб робоча точка змістилася в другий квадрант. Наступні скачки зменшення частоти та напруги повинні бути такими що в процесі всього гальмування робоча точка не виходила за межі другого квадранту.
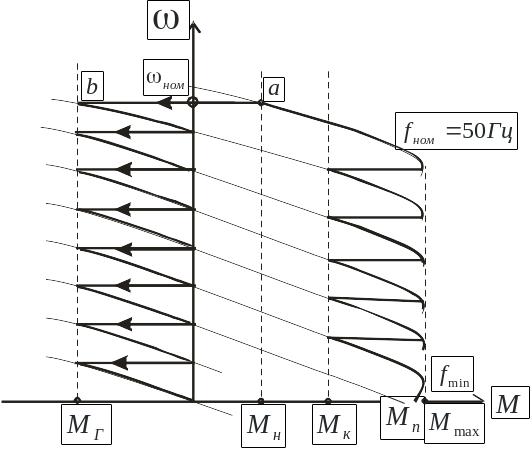
Рис. 3.25 Діаграма гальмування в АЕП з ПЧ з КВ
3.4.3Гальмування противмиканням (гп)
Для ГП в розглянутій схемі достатньо, щоб робота вихідного блока була тільки в режимі інвертування, а вхідного - тільки в режимі випрямляння. Для реалізації цього способу, який заключається в простеженні чергування фаз на виході інвертора необхідно наявність контактора. Безконтактним способом змінити чергування фаз неможливо. Разом в енергетичною неефективністю є друга негативна властивість – відсутність швидкодії гальмування.