

1.6Система трн-ад
Регулювання в системі ТРН-АД здійснюється за допомогою зміни напруги на затискачі статора шляхом зміни кута відмикання тиристорів.
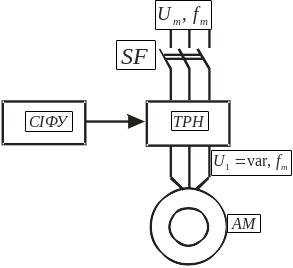
Рис. 1.10 Структурна схема системи ТРН-АД
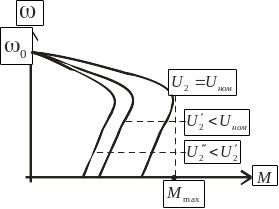
Рис. 1.11 Характеристики системи ТРН-АД
Переваги ЕП по системі ТРН-АД: По первинних затратах на 30-40% дешевше, ніж ЕП з частотним перетворювачем; на 20-50% знижені витрати на тех. обслуговування.
Недоліком ЕП по системі ТРН-АД є низький діапазон регулювання - Д=2:1.
Цей недолік, в деякому ступіні може бути усунутий при використанні АЕП з регульованою ЕРС в обмотці статора, тобто регулюванням не напруги, а ЕРС.
Для асинхронних двигунів з фазним ротором регулювання швидкості може здійснюватися впливом на коло ротору двигуна. При введення додаткового опору в коло ротора (рис. 1.2, рис. 1.4) енергія ковзання розсіюється не в об’ємі двигуна, а в опорах. Цей спосіб регулювання оцінюється як неекономічний. При використанні релейно-контактних схем виключається плавність регулювання швидкості. В даний час керування з введенням додаткових опорів в коло ротора використовується, в основному, для пуску асинхронних двигунів з фазним ротором, а також в кранових електроприводах.
Всі способи регулювання, які основані на зміні ковзання асинхронного двигуна, зв’язані з виділенням енергії ковзання в роторному колі двигуна. В вищерозглянутих способах ця енергія витрачувалась на нагрів обмотки ротора і роторних опорів. Існують системи регулюємого електропривода, в яких енергія ковзання не втрачається в опорах, а використовується корисно – повертається в коло живлення, що робить регулювання в цих системах економічним. До таких систем регулюємого привода відносяться асинхронні вентиляторні каскади і двигуни подвійного живлення.
Контрольні запитання
1. Основні способи регулювання асинхронних двигунів
2. Недоліки частотного регулювання
3. Схема АЕП з АД з реостатним регулюванням
4. Структурна схема система ТРН-АД
5. Недоліки способів регулювання, які основані на зміні ковзання асинхронного двигуна
2Асинхронний електропривод з частотним регулюванням швидкості
2.1Основні закони управління частотою обертання ад
Частота обертання ротора асинхронного двигуна
![]() (2.0)
(2.0)
де:
![]() - частота струму
обмотки ротору
- частота струму
обмотки ротору
![]() -
ковзання
-
ковзання
![]() -
кількість пар полюсів
-
кількість пар полюсів
З цього виразу випливає, що частоту обертання ротора асинхронного двигуна можна регулювати зміною будь - якої із трьох величин:
- ковзання s
- числа полюсів в обмотці статора 2р
-
частоти струму в обмотці статора
![]()
Найсучаснішім методом є частотний. Цей метод заснований на зміні синхронної частоти обертання:
![]() (
2.0)
(
2.0)
Закон управління частотою f1 залежить від характеристики навантаження виробничих механізмів.
Існують чотири основні типи характеристик навантаження виробничих механізмів.
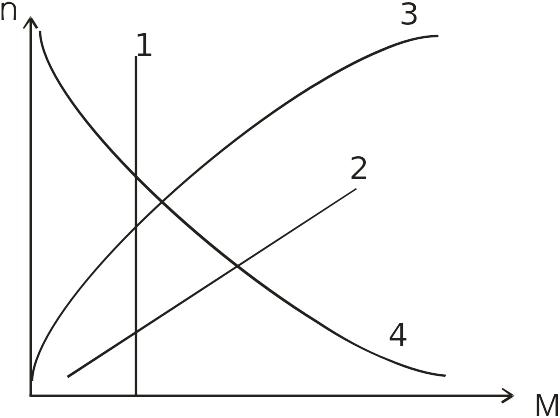
Рис. 2.12 Характеристики навантаження
На цьому малюнку:
1. Характеристика з моментом опору, не залежним від швидкості (пряма 1 ). Таку характеристику мають, наприклад, підйомні крани, лебідки, поршневі насоси при незмінній висоті подачі та ін.
2. Характеристика з моментом опору лінійно залежним від швидкості (пряма 2). Така залежність властива, наприклад, приводу генератора постійного струму з незалежним збудженням, що працює на постійне навантаження.
3. Характеристика з нелінійним зростанням моменту (крива 3). Типовими прикладами тут можуть служити характеристики вентиляторів, відцентрових насосів, грибних гвинтів. Для цих механізмів момент Мс залежить від квадрата кутової швидкості n.
4. Характеристика з нелінійно спадаючим моментом опору (крива 4). Наприклад, у механізмів головного руху деяких металорізальних верстатів момент Мс змінюється обернено пропорційно n, а потужність, споживана механізмом, залишається постійною.
Щоб регулювати частоту обертання АД, необхідно змінювати частоту струму статору .
З курсу електричних машин відомо, що магнітний потік Ф наводить в обмотці ротору ЕРС:
![]() (
2.0)
(
2.0)
де:
![]() -
частота ЕРС у роторі при ковзанні s
-
частота ЕРС у роторі при ковзанні s
![]() - кількість витків
фази обмотки ротору
- кількість витків
фази обмотки ротору
![]() - обмотковий
коефіцієнт (для спрощення можна вважити
, що
- обмотковий
коефіцієнт (для спрощення можна вважити
, що
![]()
![]() - магнітний потік
- магнітний потік
Струм обмотки ротора визначається згідно Г – подібної схеми заміщення приведеного АД:
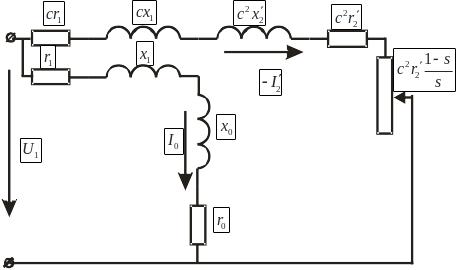
Рис. 2.13. Г-подібна схема заміщення АД

![]() (
2.0)
(
2.0)
![]() - фазна напруга
обмотки статору
- фазна напруга
обмотки статору
![]() - фазний струм
обмотки статору
- фазний струм
обмотки статору
![]() - активний опір
обмотки статору
- активний опір
обмотки статору
![]() - індуктивний опір
обмотки статору
- індуктивний опір
обмотки статору
![]() - струм намагнічування
- струм намагнічування
![]() - активний опір
кола намагнічування
- активний опір
кола намагнічування
![]() - індуктивний опір
кола намагнічування
- індуктивний опір
кола намагнічування
![]() - приведений
індуктивний опір обмотки ротору
- приведений
індуктивний опір обмотки ротору
![]() - приведений
активний опір обмотки ротору
- приведений
активний опір обмотки ротору
![]() - еквівалент
навантаження АД
- еквівалент
навантаження АД
![]() - приведений струм
обмотки ротору
- приведений струм
обмотки ротору
![]() за умов ідеального
холостого ходу. Для АД з
за умов ідеального
холостого ходу. Для АД з
![]() с=1.02-1.05, тобто можна прийняти с=1
с=1.02-1.05, тобто можна прийняти с=1
Електромагнітний момент ротору створюється за рахунок взаємодії струму ротору й магнітного поля статору.
Можна визначити електромагнітний момент ротору наступним чином:
![]() (
2.0)
(
2.0)
де
![]() - кутова синхронна швидкість обертання.
- кутова синхронна швидкість обертання.
Тоді:
![]() (
2.0)
(
2.0)
Остаточно, с урахуванням (9.4)
 (
2.0)
(
2.0)
Ця формула відома як рівняння Клоса.
Враховуючі, що
параметри АД є постійними й припускаючи,
що ковзання також є постійним![]() ,
отримуємо:
,
отримуємо:
![]() (
2.0)
(
2.0)
де К – деякій коефіцієнт, незмінний при постійному ковзанні. Таким чином, обертаючий момент АД, частота струму обмотки статору й напруга обмотки статору є взаємозалежними. Ця залежність була доведена М. П. Костенко у 1925 р. й має вигляд:
 (
2.0)
(
2.0)
де:
![]() - момент АД при
напрузі
- момент АД при
напрузі
![]() й частоті
й частоті
![]()
![]() - момент АД при
напрузі
- момент АД при
напрузі
![]() й частоті
й частоті
![]()
Слід також враховувати наступне:
На частотах біля 50 Гц можна нехтувати активним опором обмотки статору й вважати, що опір обмотки статору є тільки індуктивним, тобто виконується залежність:
![]()
![]()
Й, відповідно:
![]() (
2.0)
(
2.0)
де L – індуктивність обмоток АД
Відповідно:
 (
2.0)
(
2.0)
Тобто для стабілізації моменту при підвищенні частоти слід пропорційно підвищувати напругу
Але при підвищенні
частоти за номінальну
![]() не можна підвищувати напругу, тому що
обмотка статору АД розрахована на
номінальну фазну напругу (наприклад -
220В), а на малих частотах не можна нехтувати
активним опором обмотки статору,
необхідно компенсувати зменшення струму
статору (й, відповідно, моменту!) від
наявності активного опору обмотки
статору (так звана IR
- компенсація),
тобто необхідно збільшити напругу.
Залежність напруги обмотки статору від
частоти має бути наступною:
не можна підвищувати напругу, тому що
обмотка статору АД розрахована на
номінальну фазну напругу (наприклад -
220В), а на малих частотах не можна нехтувати
активним опором обмотки статору,
необхідно компенсувати зменшення струму
статору (й, відповідно, моменту!) від
наявності активного опору обмотки
статору (так звана IR
- компенсація),
тобто необхідно збільшити напругу.
Залежність напруги обмотки статору від
частоти має бути наступною:
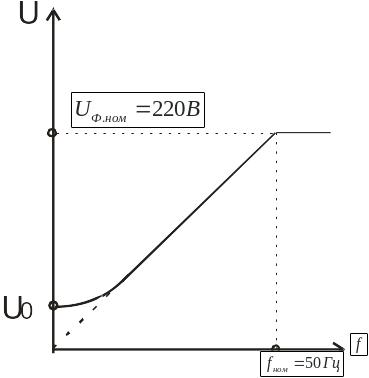
Рис. 2.14 Залежність напруги обмотки статору від частоти
При постійному моменті навантаження (Mс=const) напруга на статорі повинна регулюватися пропорційно частоті:
![]() (
2.0)
(
2.0)
Рис. 2.15 Пропорційний закон керування
Для вентиляторного моменту навантаження напруга на статорі повинна регулюватися за формулою:
![]() (
2.0)
(
2.0)

Рис. 2.16 Закон керування при вентиляторному моменті навантаження
При цьому потужність двигуна збільшується при зростанні частоти обертання:
![]() (
2.0)
(
2.0)
де:
 (
2.0)
(
2.0)
Тобто:
![]() (
2.0)
(
2.0)
Якщо ж регулювання здійснюється за умови сталості потужності двигуна (Рем= М1=const), то напругу треба змінювати відповідно до квадратичного закону:
 (
2.0)
(
2.0)
або
![]() (
2.0)
(
2.0)
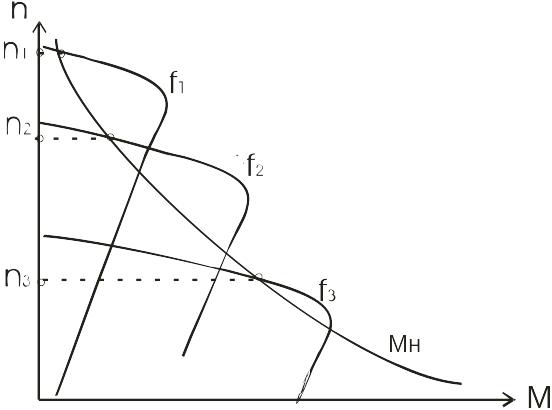
Рис. 2.17 Квадратичний закон керування
При цьому потужність двигуна є постійною і не залежить від частоти обертання.
Частотне регулювання двигунів дозволяє плавно змінювати частоту обертання в широкому діапазоні без зайвих втрат потужності на регулювання.