

Міністерство освіти і науки, молоді та спорту України
ЖИТОМИРСЬКИЙ ТЕХНОЛОГІЧНИЙ КОЛЕДЖ
В.С. Конишев
МЕТОДИЧНА РОЗРОБКА
Системи автоматизованого електроприводу з асинхронними двигунами
Житомир
2013р.
1Електропривод з двигунами змінного струму
1.1Завдання управління електроприводом:
Найбільш часто зустрічаємим видом завдань управління є задача безпосереднього регулювання швидкості обертання ЕП. Крім того, є спеціально регульовані приводи, які виконують завдання регулювання електромагнітного моменту, потужності, прискорення, регулювання положення ротора, регулювання якого-небудь технологічного параметра. Крім того є завдання стабілізації, стеження, позиціонування, забезпечення інваріантності (полягає у забезпеченні незалежності або слабкої залежності від неконтрольованих збурень), забезпеченні автономності (забезпечення незалежності якого параметра об'єкта від інших параметрів.
Синтез управління ЕП зводиться до знаходження достатньо обумовленої моделі ЕП, яка в даний час являє собою в більшості випадків систему рівнянь за другим законом Кірхгофа електромагнітних кіл ЕД і СП для еквівалентної двофазної машини, а також системи рівнянь Ньютона для механічних кіл ЕП.
Основна проблема при створенні моделі ЕП:
- Врахування насичення магнітного кола двигуна;
- Врахування пружних механічних зв'язків;
- Врахування нелінійних зв'язків.
1.2 Класифікація способів регулювання асинхронного двигуна
Розглянемо можливі способи регулювання швидкості асинхронних двигунів (рис 1.1). Як відомо, швидкість двигуна визначається двома параметрами: швидкістю обертання електромагнітного поля статора і ковзанням s:
![]() (
1.0)
(
1.0)
Виходячи з (1.1)
принципово можливі два способи регулювання
швидкості: регулювання швидкості
обертання поля статора і регулювання
ковзання при постійній величині
![]() .
.
Швидкість обертання поля статора визначається двома параметрами: частотою напруги обмотки статора, та числом пар полюсів двигуна. У відповідності з цим можливі два способи регулювання швидкості: зміною частоти напруги живлення за допомогою перетворювача частоти, що включаються в коло статора двигуна (частотне регулювання), і шляхом зміни числа пар полюсів двигуна.
Регулювання ковзання двигуна при постійній швидкості обертання поля статора для короткозамкнутих асинхронних двигунів можливе шляхом зміни величини напруги статора при постійній частоті цієї напруги. Для асинхронних двигунів з фазним ротором, крім того, можливі ще два способи: введення в коло ротора додаткових опорів (реостатне регулювання) і введення в коло ротора додаткової регулюючої ЕРС (асинхронний вентильний каскад і двигун подвійного живлення).
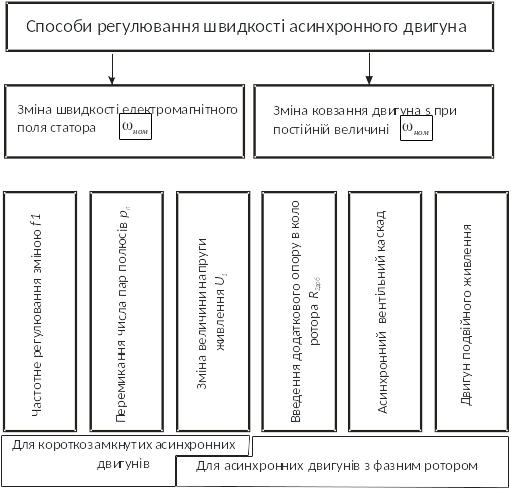
Рис. 1.1 Класифікація способів регулювання асинхронних двигунів
1.3Оцінка способів регулювання асинхронного двигуна
В даний час завдяки розвитку силової перетворювальної техніки створені і серійно випускаються різні види напівпровідникових перетворювачів частоти, що означає випереджувальний розвиток і широке застосування частотно-регулюючого асинхронного електропривода. Основними перевагами цієї системи регулюючого електропривода є:
- плавність регулювання і висока жорсткість механічних характеристик, що дозволяють регулювати швидкість в широкому діапазоні;
- економічність регулювання, що визначається тим, що двигун працює з малими величинами абсолютного ковзання і втрати в двигуні не перевищують номінальних.
Недоліками частотного регулювання є складність і висока коштовність (особливо для приводів великої потужності) перетворювачів частоти і складність реалізації в більшості схем режиму рекуперативного гальмування.
Регулювання швидкості зміною кількості пар полюсів асинхронного двигуна дозволяє отримувати декілька (від 2 до 4) робочих швидкостей, тобто плавне регулювання швидкості і формування перехідних процесів при цьому способі неможливо. Тому даний спосіб має визначенні області застосування, але не може розглядатись, як основа для побудови систем регулюючого електропривода.
Регулювання швидкості асинхронного двигуна зміною величини напруги живлення при постійній ( стандартної) його частоти для асинхронних двигунів з короткозамкнутим ротором має цілком обмежене застосування, внаслідок того, що регулювання швидкості тут спряжено з втратами енергії ковзання, що виділяються в роторі двигуна і ведуть до його перегріву. Отримані при цьому способі механічні характеристики не рекомендовані для якісного регулювання. Діапазон регулювання не перевищує 1,5:1; більш глибоке регулювання швидкості можна допускати тільки короткочасно. Виходячи з даної оцінки, регулювання зміни величини напруги живлення застосовується, головним чином, тільки для забезпечення плавного пуску нерегулюємих асинхронних електроприводів чи для короткочасного зниження швидкості. Іноді цей спосіб регулювання використовується для регулювання швидкості насосів і вентиляторів ( механізмів з вентиляторним характером навантаження) невеликої потужності (до 15 кВт), однак і в цьому випадку необхідно збільшення встановленої потужності двигуна.