

2.5 Кінематичні з’єднання
Кінематична пара є дволанковим кінематичним ланцюгом, призначеним для відтворення необхідного відносного руху ланок. Для такого відтворення руху ланок іноді зручніший кінематичний ланцюг, що складається більш, ніж з двох ланок.
Кінематичне з’єднання – це кінематичний ланцюг, що конструктивно замінює в механізмі кінематичну пару. Кінематичне з’єднання може містити декілька ланцюгів і декілька кінематичних пар, але тільки дві ланки можуть бути з’єднані з іншими ланками механізму. Наприклад, у кульковому підшипнику (рисунок 2.18 а) тільки внутрішнє 1 і зовнішнє 2 кільця з’єднані з ланками механізму: валом 5 і з корпусом виробу (на рисунку не показаний). Кульки 3, сепаратор 4 і кільця взаємодіють між собою. Пружинне кільце 6 утримує підшипник від лінійного переміщення вздовж осі у.
Кульковий підшипник, в якому допускаються перекоси осі в певних межах (вони на рисунку 2.18, а показані стрілками), з урахуванням цих перекосів може вважатися еквівалентом трирухомої сферичної
|
а б Рисунок 2.18 – Кульковий підшипник як еквівалент трирухомої сферичної кінематичної пари 1 – внутрішнє кільце шарикопідшипника, 2 – зовнішнє кільце шарикопідшипника, 3 – шарики, 4 – сепаратор, 5 – вал, 6 – пружинне кільце; W – число ступенів вільності відносно нерухомої ланки |
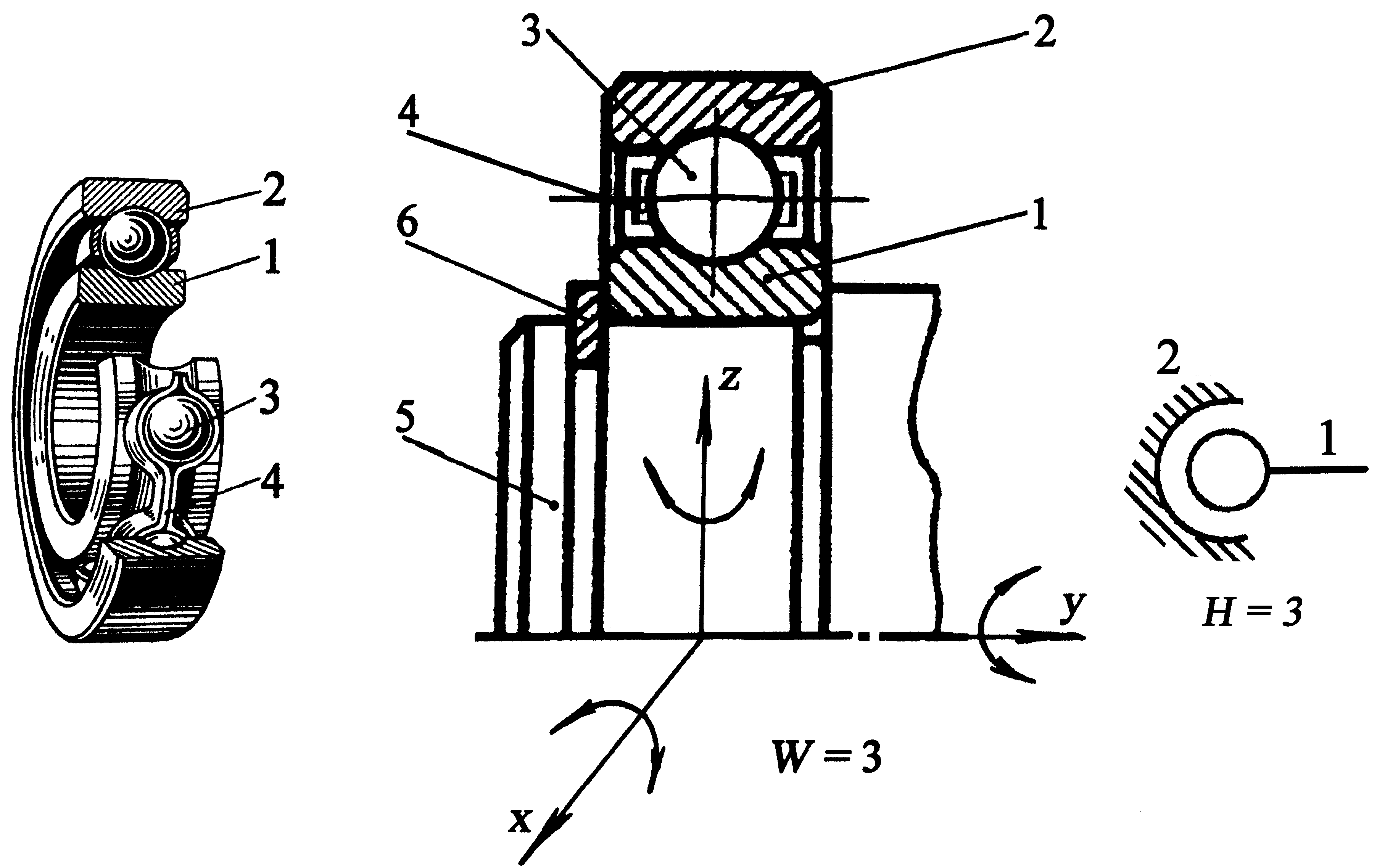
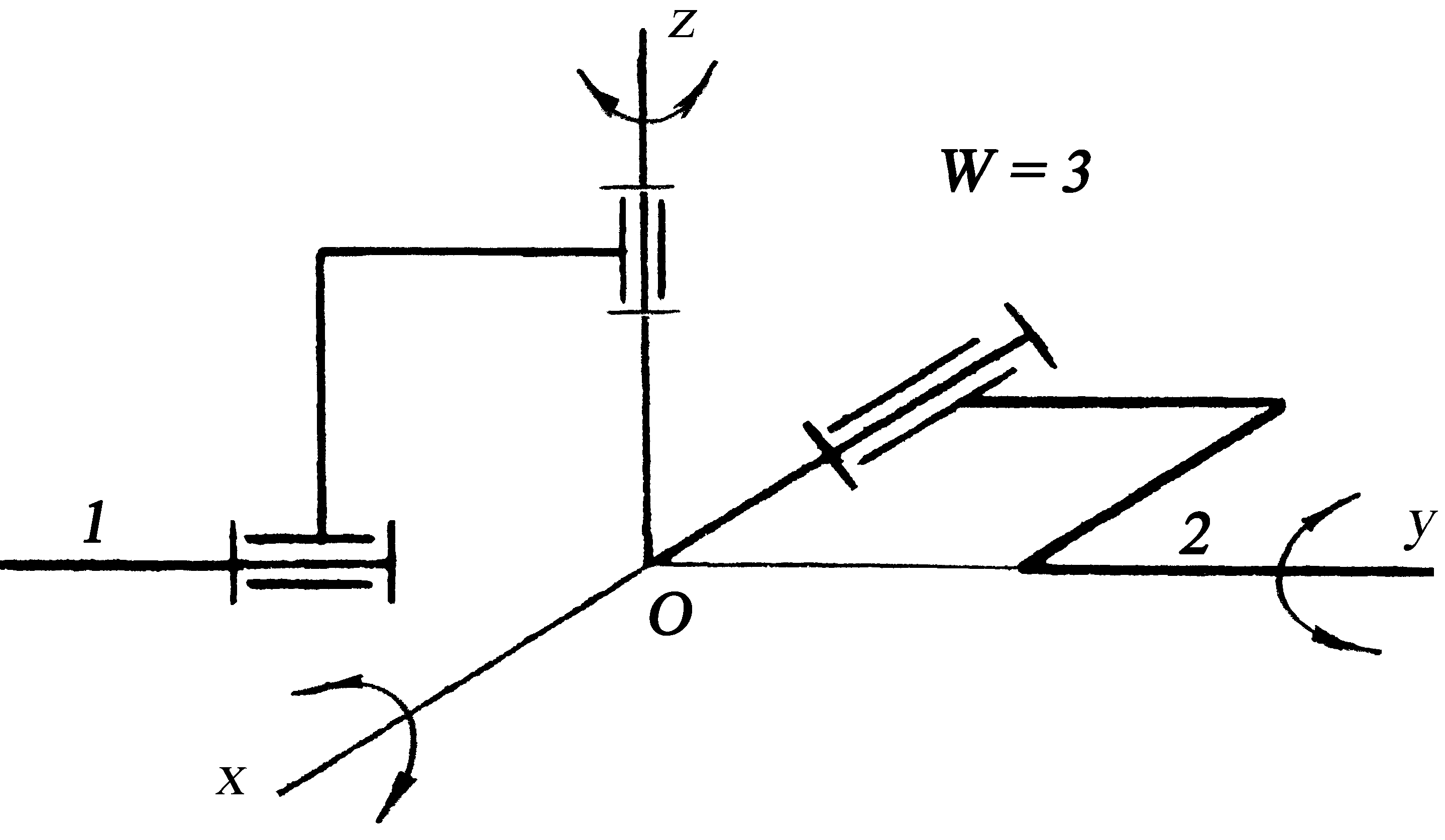
кінематичної пари (рисунок 2.18, б). У деяких механізмах, наприклад, промислових роботах і маніпуляраторах сферичну кінематичну пару, що утворена ланками 1 і 2, замінюють кінематичним з’єднанням з двома додатковими ланками і трьома обертальними парами (рисунок 2.19).
|
Рисунок 2.19 – Кінематичне з’єднання як еквівалент трирухомої сферичної кінематичної пари |
На рисунку 2.20,а наведено кінематичне з’єднання, що еквівалентне трирухомій площинній кінематичній парі (рисунок 2.20,б).
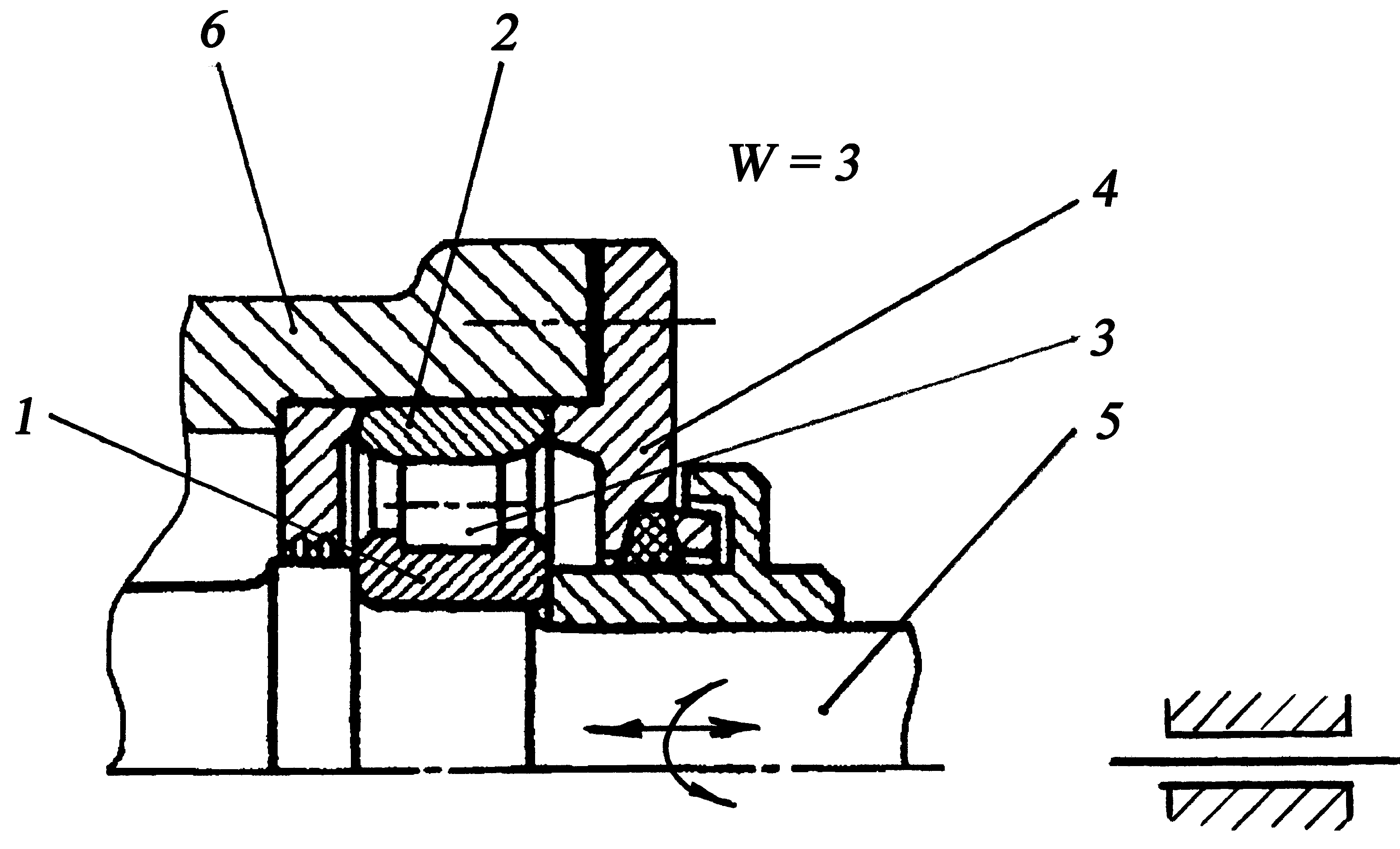
Роликовий підшипник (рисунок 2.21,а) еквівалентний дворухомій циліндричній парі (рисунок 2.21,б). Внутрішнє кільце 1 роликопідшипника з’єднується з валом 5, зовнішнє кільце 2 з корпусом 6 виробу. Кільця 1, 2 і ролик 3 взаємодіють між собою. Кришка 4 утримує зовнішнє кільце 2 роликопідшипника від осьового переміщення.
|
а б Рисунок 2.20 Кінематичне з’єднання (а), що еквівалентне трирухомій площинній кінематичній парі (б) |
|
а б Рисунок 2.21 – Роликовий підшипник (а) – еквівалент дворухомій циліндричній кінематичній парі (б) |

На рисунку 2.22,а наведене кінематичне з’єднання, що еквівалентне сферичній парі з пальцем (рисунок 2.22,б).
|
а б Рисунок 1.22 – Кінематичне з’єднання (а), що еквівалентне сферичній кінематичній парі з пальцем (б) |

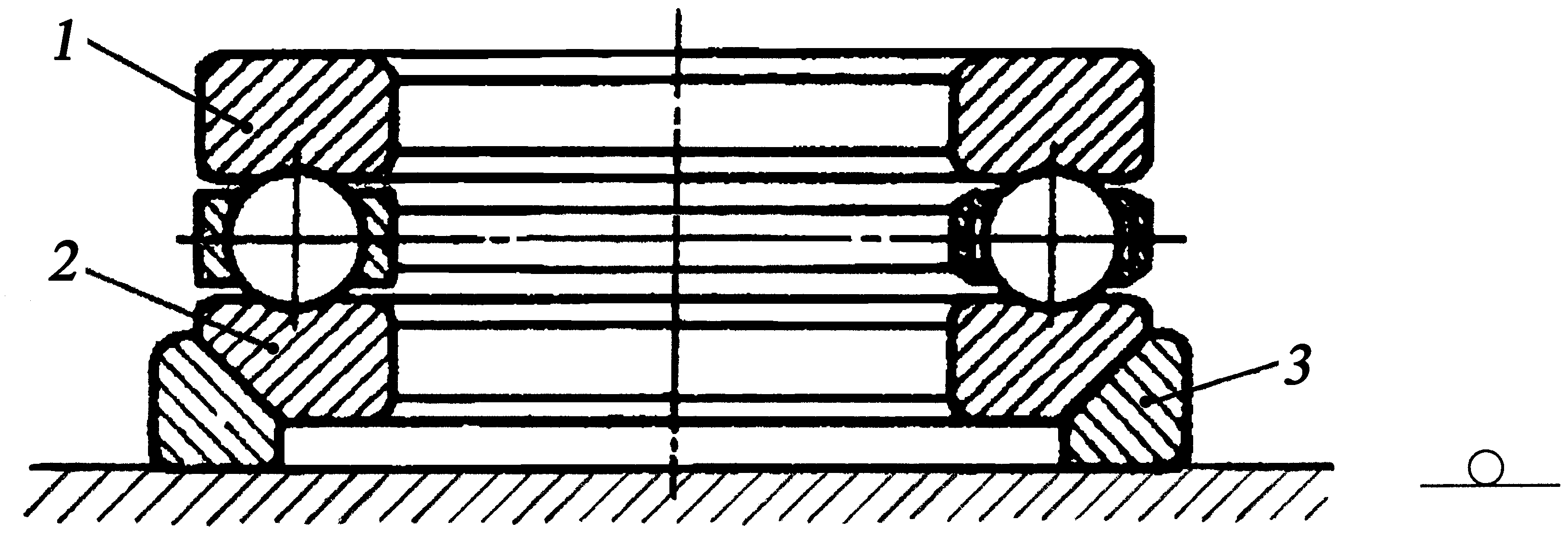
Упорний підшипник 1 (рисунок 2.23,а), що встановлений сферичною основою 2 на конусній поверхні ланки 3 , еквівалентний п’ятирухомій кінематичній парі (рисунок 2.23,б).
|
а б Рисунок 2.23 – Упорний підшипник (а)– еквівалент п’ятирухомій кінематичній парі (б) |
Застосування кінематичних з’єднань замість кінематичних пар дозволяє зменшити витрати на тертя, спростити технологію виготовлення, збільшити несучу здатність і реально здійснити застосування кінематичних пар III і IV класів.