

Коротков Е.Б,
Информационные устройства и системы.
Ч.3 Локационные системы.
Локационные информационные системы (ЛС) относятся к устройствам бесконтактного действия и реализуют бионическую функцию слуха. Информативным параметром этих систем является модулированная волна различной физической природы, характеристики которой определяются интегральными свойствами среды распространения. В робототехнике и мехатронике ЛС используют для определения координат и скорости объектов в задачах управления и навигации, для обеспечения необходимой траектории движения исполнительного механизма вблизи границы раздела сред, а также в качестве средств безопасности. Отдельной областью их применения является определение свойств среды распространения. Во всех случаях преобразователи ЛС являются датчиками среды. Поскольку и система, и объект находятся в некотором физическом поле, результаты измерения существенно зависят от его свойств. В зависимости от пространственно-временных свойств среды различают потенциальные (например, электростатические) и вихревые (электромагнитные и акустические) поля. Как правило, вихревые поля содержат больше параметров, пригодных для измерения, и поэтому более информативны. Тем не менее иногда (например, при работе на малых расстояниях) целесообразно использовать ЛС, принцип действия которых основан на свойствах потенциальных полей Однако в любом случае необходимые данные получают из переносимой полем информации об объекте.
ЛС подразделяют по трем основным признакам:
по физической природе носителя информации — электромагнитные, акустические, оптические, пневматические, электрические и магнитные;
по способу локации — активные и пассивные;
по типу модулирующей функции — непрерывные и импульсные.
Активные ЛС регистрируют отраженный эхо-сигнал, в то время как пассивные воспринимают собственное излучение объекта. Примером активной ЛС является акустический дальномер, пассивной — вихретоковая система.
Теоретические основы локации
Общие сведении
Движение волны, представляющее собой колебательный процесс распространения возмущения в некоторой среде, происходит с конечной скоростью с и описывается волновым уравнением вида
![]() ,
где u — амплитуда возмущения;
х, у, z — ортогональные
оси координат.
,
где u — амплитуда возмущения;
х, у, z — ортогональные
оси координат.
В волновой теории наиболее известным является частотное уравнение
![]()
Механизм распространения волн в среде связан с явлениями отражения, дифракции, рефракции (искривление луча вследствие преломления), поглощения, рассеяния и различен для разных длин волн. Особенно наглядно это проявляется в области радиочастот, которые широко используются в навигационных системах мобильных роботов. Так, волны сверхдлинного диапазона (А, > 10 км) сравнительно слабо поглощаются земной корой, а на их распространение существенно влияет ионосфера, которая вместе с поверхностью Земли образует сферический волновод. Длинные волны
(к = 1... 10 км), напротив, сильно поглощаются Землей и хорошо ее огибают; это происходит вследствие дифракции и волноводного эффекта, присущего волнам данного диапазона. Средние волны (X = 100... 1000 м) значительно поглощаются ионосферой днем и распространяются только благодаря дифракции (так называемые земные волны). Ночью ионосферные отражения улучшаются, и дальность волн резко возрастает (эти волны получили название пространственных). Что касается коротких волн (X = 10... 100 м), то дифракция у них выражена слабо, однако благодаря ионосферному отражению они могут достигать точки антипода. В диапазоне X = 10... 100 м сильно проявляются дисперсионные свойства ионосферы, а для наиболее коротких волн она и вовсе прозрачна. Ультракороткие волны (X = 1 мм ... 10 м) распространяются практически прямолинейно, а на их дальность влияет затухание колебаний в тропосфере и стратосфере Земли Диапазон ультракоротких волн делят на четыре поддиапазона: метровый, дециметровый, сантиметровый и миллиметровый. Дальность распространения метровых волн достигает 2000 км, сантиметровые волны рассеиваются и поглощаются облаками и туманом, а миллиметровые — газами атмосферы. Так как дальность распространения санти- и миллиметровых волн невелика, то в системах передачи информации этих диапазонов применяют волноводы и другие направляющие устройства.
Под затуханием будем понимать некоторую интегральную характеристику, которая связана с потерей энергии колебаний в среде, приводящей к ослаблению амплитуды сигнала. Затухание сигнала влияет на дальность его распространения. В линейных системах с одной степенью свободы амплитуда и колебаний убывает с расстоянием х по экспоненциальному закону. Теоретически затухание длится бесконечно долго, однако на практике колебательный процесс считают закончившимся, если его амплитуда составляет 1% от начальной, т. е. =0,01, или х = 4,6/ζ.
Зная коэффициент затухания, можно определить глубину проникновения электромагнитных волн в среду. Так, для морской воды коэффициент затухания
ζ.=
![]() —
, где μ,ρ — соответственно магнитная
проницаемость и удельное электросопротивление
морской воды;
—
, где μ,ρ — соответственно магнитная
проницаемость и удельное электросопротивление
морской воды;
![]() —
магнитная постоянная. Глубина
проникновения δ, при которой амплитуда
сигнала уменьшается в с раз, определяется
выражением δ= 1/е. Следовательно, при
частоте электромагнитного сигнала f
= I кГц (λ = 300 м), ρ = 0,25 Ом • м и μ = 1 глубина
проникновения б = 8 км. В металлических
предметах затухание значительно сильнее.
Так, в стали (р ~ 7 -10 Ом • м, 10 ) глубина
—
магнитная постоянная. Глубина
проникновения δ, при которой амплитуда
сигнала уменьшается в с раз, определяется
выражением δ= 1/е. Следовательно, при
частоте электромагнитного сигнала f
= I кГц (λ = 300 м), ρ = 0,25 Ом • м и μ = 1 глубина
проникновения б = 8 км. В металлических
предметах затухание значительно сильнее.
Так, в стали (р ~ 7 -10 Ом • м, 10 ) глубина
проникновения б составляет доли миллиметра.
В инженерных расчетах для определения затухания сигнала также используют интегральный параметр, называемый коэффициентом ослабления где Р пр, Ризл — мощность сигнала на входе приемника и на выходе излучателя соответственно.
Ослабление сигнала зависит от расстояния / между приемником и излучателем (или объектом) и свойств среды. Так, для изотропной среды, когда волна имеет сферическую форму, мощность сигнала на входе приемника
убывает пропорционально I2 . Например, в пассивной ЛС, где волна проходит расстояние до объекта один раз,
Рпр=КослРизл = kрРизл / l2
В активной ЛС (например, в импульсном дальномере) волна дважды проходит путь до объекта, поэтому ослабление сигнала будет в четыре раза больше. Для таких систем дальность определится выражением
/ = сΔt/ 2,
где Δt — время прохождения сигнала от момента излучения до момента приема.
Направленность излучении
Эффективность ЛС в значительной степени определяется надежностью локации (точностью обнаружения сигнала, помехоустойчивостью связи и др.) и дальностью ее распространения. Поэтому при посылке информационных сигналов используют направленные модулированные излучения.
Направленность излучателя (приемника) ЛС — это свойство, заключающееся в наличии некоторой пространственной избирательности, т. е. способности излучать (принимать) волны в одних направлениях в большей степени, чем в других. Направленность преобразователя позволяет увеличить соотношение сигнал/шум как в режиме излучения, так и в режиме приема сигнала.
В режиме излучения направленность определяется интерференцией колебаний, приходящих в данную точку среды от отдельных (малых по сравнению с длиной волны в среде) участков излучателя. Для направленного излучения необходимо выполнение неравенства dхар/λ >> 1, где dхар/λ — параметр, называемый волновым размером излучателя;
dхар — характерный размер излучателя (например, его диаметр).
В режиме приема сигнала направленность вызывается интерференцией электрических напряжений, развиваемых на выходных клеммах отдельных элементов приемника.
В общем случае диаграммы направленности излучателя и приемника ЛС отличаются. Это характерно, например, для оптических ЛС. Если же в системе используются обратимые преобразователи, например в акустических ЛС, то их диаграммы направленности в режимах приема и излучения полагают одинаковыми.
Направленность — важнейшая характеристика локации, обеспечивающая саму возможность свяли. В живой природе она реализуется при фокусировке сигнала вследствие интерференции его составляющих, излучаемых несколькими источниками. У летучей мыши такими источниками являются две ноздри, расстояние между которыми приблизительно соответствует 2А, излучаемого звука Ширина диаграммы направленности излучающего аппарата летучей мыши составляет 30...50°, приемного — 1…50. Указанное обстоятельство обеспечивает высокую разрешающую способность ее локационного аппарата и позволяет различать проволоку толщиной 0,2 мм, натянутую на расстоянии всего 5 мм от плоской отражающей поверхности. Высокая разрешающая способность характерна и для навигациохшой системы дельфина, который обнаруживает шарик диаметром 3 мм на расстоянии 5 м.
Наиболее простая математическая модель, описывающая излучатель, основана на его представлении в виде дискретной или непрерывной совокупности малых по сравнению с длиной волны излучающих элементов, а поле излучателя определяется суммированием сферических волн, создаваемых отдельными элементами. Общие теоретические методы описания направленности излучения основываются на использовании функций Грина, позволяющих учесть геометрические характеристики излучателя и излучаемою сигнала. Однако для преобразователей произвольной формы эти характеристики трудно определить из-за сложности формы поля вблизи излучающей поверхности
Направленность излучателя (приемника) ЛС описывается двумя параметрами- характеристикой направленности и коэффициентом концентрации.
Характеристикой направленности преобразователя называется выражение вида
D(r) = P(r)/Р(r0),
где Р(r), Р(r0)— мощности фиксируемых на одинаковом расстоянии от центра преобразователя сигналов в направлениях, характеризуемых радиус-векторами
г и го соответственно. Обычно радиус-вектор го выбирают таким, чтобы его направление совпадало с направлением максимума излучения или максимума чувствительности. В графическом виде характеристика D(r) представляет собой пространственную или плоскую диаграмму направленности, отображаемую в полярных или декартовых координатах (рис. 5.1, а). Аргументом диаграммы направленности, как правило, является угол 0, отсчитываемый от направления ОА максимального излучения (см. рис. 5.1, а) и зависящий от частоты сигнала. Направление ОА обычно совпадает с одной
из осей преобразователя.

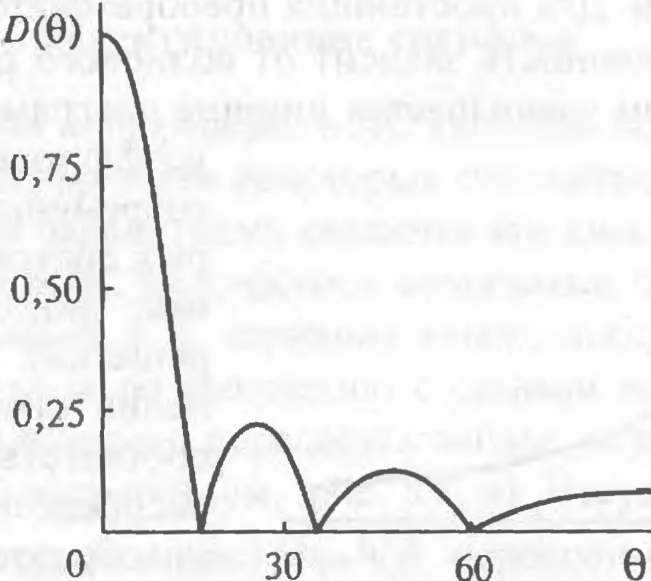
Диаграмма направленности в полярной (а) и в декартовой (б) системах координат (ОА — направление главного максимума, 60707 — угловая ширина главного максимума по уровню 0,707)
Диаграмма направленности характеризуется: главными и добавочными максимумами (лепестками); угловой шириной главного максимума; отношениями амплитуд добавочных максимумов к главному.
Угловую ширину главного максимума определяют двумя способами. В первом она равна углу θ0 между направлениями нулевого излучения, во
втором — углу θ0.707 между направлениями излучения по уровню 0,707,
соответствующему 50 %-ной излучаемой мощности.
Лепестковый характер диаграммы направленности излучателя связан с интерференцией воли, излучаемых отдельными элементами. В главном лепестке диаграммы может сосредоточиваться свыше 90 % всей мощности излучателя. Простейшим излучателем является магнитный диполь — виток провода, диаметр которого мал по сравнению с длиной излучаемой волны. Диаграмма направленности диполя имеет форму гороида. Направленности реальных преобразователей в горизонтальной и вертикальной плоскостях обычно различаются. Так, в радиолокационных системах сантиметрового диапазона диаграмма узкая в горизонтальной плоскости и широкая в вертикальной.
Коэффициент концентрации, или коэффициент направленного действия
АГад характеризует меру концентрации излучаемой энергии вдоль некоторого направления (обычно направления главного максимума диаграммы направленности) определяется выражением вида
Кнд=Рmax /P
где Ртах — мощность сигнала в направлении главного максимума на некотором расстоянии l от излучателя; Р — мощность сигнала гипотетического «ненаправленного» излучателя на том же расстоянии. Под ненаправленным понимается излучатель с диаграммой направленности в
форме шара. Для простейших преобразователей ЛС (диполей) Кнд = 1,5.
Направленность зависит от волнового размера d xар/λ - излучателя. С его увеличением уменьшается ширина диаграммы направленности и возрастает
коэффициент концентрации. В современных ЛС, преобразователи которых состоят из большого числа элементарных диполей (так называемые антенные решетки), существует возможность управления диаграммой направленности путем соответствующего амплитудно-фазового распределения излучения по поверхности преобразователя. Так, уменьшая мощность излучения Р(х) отдельных диполей от центра излучающей поверхности к ее краю, можно расширить главный максимум диаграммы направленности и уменьшить добавочные максимумы. Если же увеличивать мощность излучения Р(х) диполей к краю излучающей поверхности, можно сформировать более острую диаграмму направленности. Изменяя фазу излучения отдельных диполей, можно поворачивать главный максимум диаграммы направленности, т. е. осуществлять сканирование среды излучения.
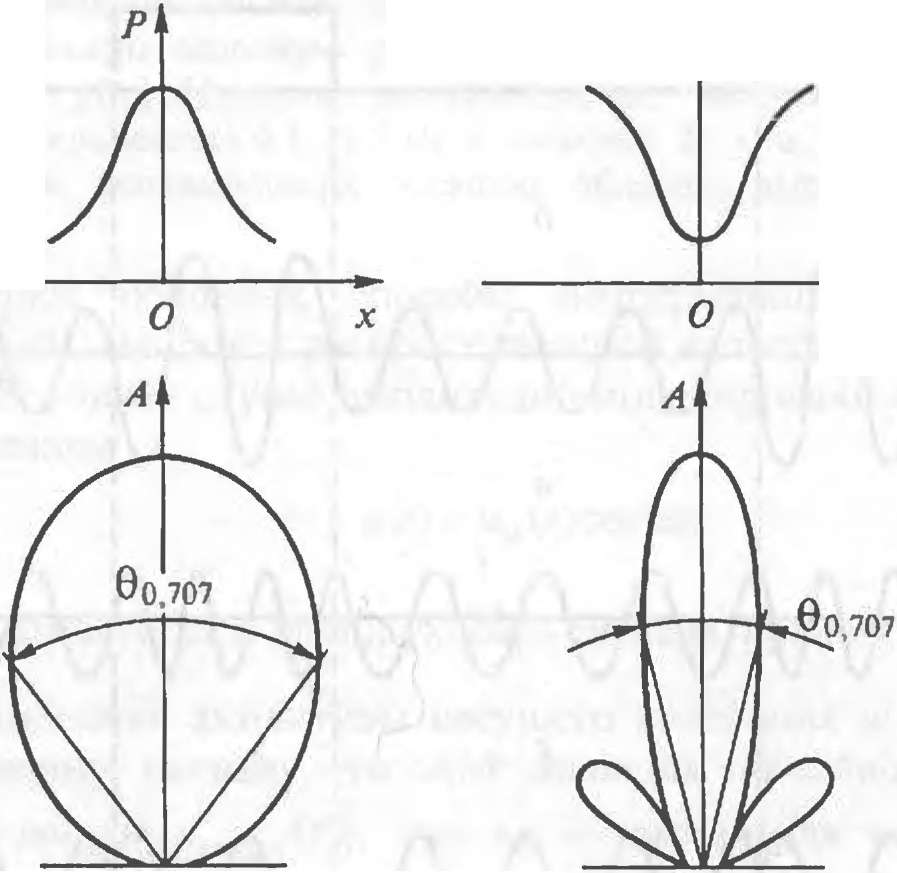
Зависимость вида диаграммы направленности от амплитудного распределения мощности
Модуляция и детектирование сигналов
Основным принципом передачи информации в ЛС является модуляция — изменение по заданному закону во времени некоторых параметров, характеризующих сигнал. Обычно такими параметрами являются его амплитуда, частота и фаза. Так как информация в ЛС переносится волновыми процессами, то имеет место модуляция колебаний, т. е. вариация какого-либо параметра периодических колебаний, медленная по сравнению с самими колебаниями. Колебание, с помощью которого передается сигнал, называется несущим, а его частота f— несущей частотой. Несущее колебание имеет более высокую частоту, чем частота fм переносимого (модулирующею) сигнала, которая называется модулирующей частотой. При описании модуляции обычно используют понятие круговой частоты ω=2πf. В дальнейшем для краткости со также будем называть несущей частотой, а ωм — частотой модулирующею сигнала.
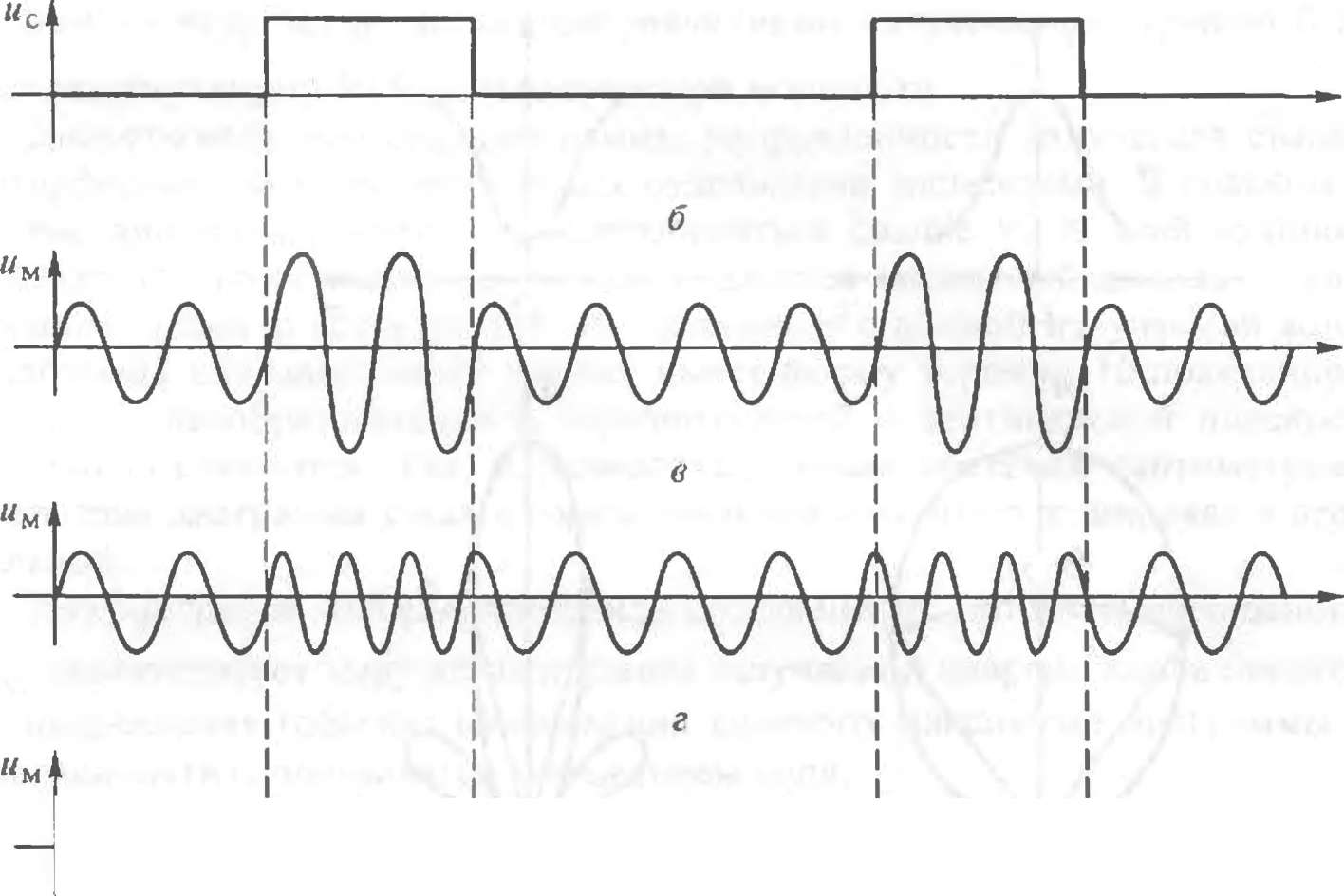
Модулированные колебания:
а — несущее колебание; б — модулирующий сигнал; в — б — амилитудно-, частотно- и фазово-модулированное колебание соответственно и разделяют непрерывную и импульсную модуляции. В первом случае модулирующий сигнал изменяет амплитуду, частоту или фазу несущего колебания, во втором — кроме указанных имеет место также вариация ширины импульсов, а также импульсно-кодовая модуляция. При любом способе непрерывной модуляции скорость изменения амплитуды, частоты или фазы должна быть достаточно мала, чтобы за один период несущего колебания Т = 1/f = 2π/ω модулирующий сигнал почти не менялся. Обычно круговую частоту несущего колебания (несущую частоту) выбирают из условия
ω >5ωм . При импульсной модуляции вместо круговой частоты используют
термин частоты следования импульсов ω, которая в соответствии с теоремой Шеннона должна быть по крайней мере вдвое выше максимальной частоты модулирующего сигнала: ωн >2ωм .
Сложение сигналов с близкими частотами вызывает биение, которое можно рассматривать и как модуляцию.
В живой природе при локации используется как непрерывная, так и импульсная модуляция. Первая характерна для летучих мышей, вторая — для дельфинов и наземных млекопитающих. В обоих случаях имеет место частотная модуляция, причем закон изменения частоты довольно сложен и определяется конкретной задачей. Так, летучая мышь в обычных условиях в течение 40 .. 100 мс излучает ультразвуковые сигналы постоянной частоты 70...80 кГц, но в конце подачи сигнала эта частота за 1...5 мс линейно убывает до 45...60 кГц. Локационные сигналы дельфинов имеют существенно меньшую длительность (0,04...0,1 мс), но более широкий спектр (30.,. 150 кГц). Наземные млекопитающие, например землеройки, излучают импульсы длительностью 0,1...3,5 мс и частотой 20 кГц. Слуховая (приемная) система животных, использующих локацию, обладает выраженными резонансными свойствами.
Рассмотрим основные способы непрерывной модуляции сигналов. Наиболее распространенной является амплитудная модуляция (АМ). В общем случае амплитудно-модулированный сигнал определяется выражением
u(t)=um(t)cosωt
где um — амплитуда модулирующего сигнала.
Если изменение амплитуды несущего колебания и u(t) пропорционально модулирующему сигналу, то АМ является линейной. В этом случае
U(t)=u0(1+mum(t)/uмmax(t)), где u0— амплитуда несущего колебания, m — глубина модуляции, характеризующая степень изменения амплитуды:
M=(ummax – ummin )/(ummax +ummin )
0<m<1, ummax, ummin - максимальная и минимальная амплитуды модулирующего
сигнала соответственно.
В простейшем случае, когда модулирующий сигнал является гармоническим:
U(t)=u0(1+mcosωmt)cos(ωt+φ),
где φ — начальная фаза несущего колебания.
Для определения спектра амплитудно-модулированного сигнала величиной φ можно пренебречь. Следовательно, при т = 1 мощность каждого спутника составляет лишь 25 % от мощности несущего колебания. Чем больше глубина модуляции, тем больше мощность, переносимая спутниками, т. е. лучше отношение сигнал/шум. Однако на практике т = 0,6...0,8, поскольку при т > 0,8 резко возрастают искажения при детектировании амплитудно-модулированного сигнала. Ширина спектра До при АМ определяется как разность между наибольшей (верхней) и наименьшей (нижней) частотами спектра и в рассматриваемом случае равна 2ωм
Амплитудно-модулированный сигнал (а) и его спектр (б)
В общем случае модулирующий сигнал um(t) имеет более сложный
спектр: спутник состоит уже не из одночастотного сигнала, а из набора сигналов разных частот, образующих по обе стороны от несущей две полосы боковых частот. Если АМ линейная, то нижняя (левая) полоса боковых частот в точности повторяет форму модулирующего сигнала, а верхняя (правая) является ее зеркальным отражением (см. пунктирные линии на рис. 5.5, б). Анализ спектра сигнала свидетельствует, что полезную информацию можно восстановить по любой боковой полосе. Для этого в схемах детектирования подавляют несущую частоту и одну из боковых.
Достоинством АМ является простота решений и малая ширина спектра сигнала, составляющая десятки килогерц при передаче звукового и десятки мегагерц при передаче телевизионного сигнала. В то же время передача амплитудно-модулированного сигнала требует значительных энергетических затрат, причем мощность полезного сигнала зависит от глубины модуляции. Так, при мощности несущего колебания 500 Вт мощность каждого спутника даже при т = 1 не превышает 125 Вт, а поскольку для уменьшения искажений т < 0,8, следовательно, доля полезного сигнала еще меньше.
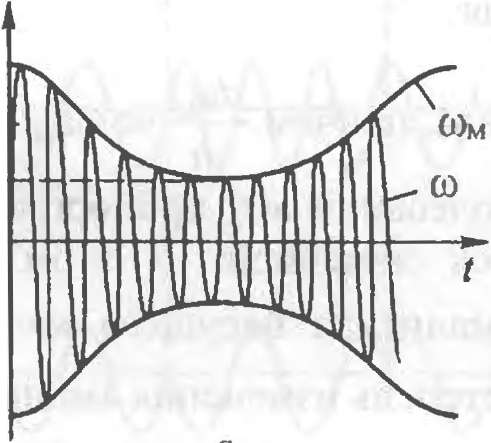
При частотной модуляции (ЧМ) модулирующий сигнал um(t) изменяет мгновенные значения частоты со, не влияя на амплитуду колебаний. Характерным примером является известный скрипичный прием вибрато, когда качание пальца на струне изменяет ее длину и тем самым высоту звука. Чаще всего используют линейную ЧМ, при которой изменение несущей частоты пропорционально амплитуде модулирующего сигнала.
В простейшем случае модуляции гармоническим сигналом um(t)= ummax(t)cosmt несущая частота со изменяется по закону
ω(t)=ω0+Δωcosωmt
Здесь представляет собой амплитуду отклонения несущей частоты со от начальной ω0, а cosωmt определяет форму модулирующего сигнала. Параметр Δω, называемый девиацией частоты, не зависит от частоты сигнала и соответствует глубине модуляции при АМ.
Ширина спектра Дсо частотно-модулированного сигнала определяется значением индекса ЧМ: β= Δω / ωm .При малых р ширина спектра практически не зависит от его значения и равна 2 ωm .В этом случае частотно-модулированный сигнал, как и амплитудно-модулированный, состоит из колебания с несущей частотой ω0 и двух спутников с частотами ω0 - ωm и ω0 + ωm,
т. е. при малых β спектры амплитудно- и частотно-модулированных сигналов одинаковы. Однако, как правило, β»1, и, следовательно, спектр
частотно-модулированного сигнала значительно шире, чем амплитудно-модулированного.
В большинстве случаев модулирующий сигнал не является гармоническим, а представляет собой набор частот. Для примера рассмотрим передачу частотно-модулированных сигналов звукового диапазона 20 Гц ... 20 кГц на несущей частоте 50 МГц. Пусть при увеличении амплитуды модулирующего сигнала в диапазоне от 0 до 1 В несущая частота будет изменяться от 49,9
до 50,1 МГц, т. е. девиация частоты = 0,2 МГц. Для верхней частоты передаваемого сигнала, равной 20 кГц, индекс Р = 10 и ширина спектра составит 440 кГц. (Для нижней частоты сигнала при тех же условиях р = 10 .) Поскольку (3 имеет различные значения при изменении частоты модулирующего сигнала, в настоящее время принят стандарт, в соответствии с которым индекс ЧМ вычисляют по формуле
βmax= Δωmax / ωmmax . Например, при передаче звука в телевизионном стандарте максимальная девиация несущей частоты звукового сопровождения Д(0тах = ^0 кГц, а
максимальная модулирующая частота сомпш = 15 кГц, при этом (Зтах = 3,33.
Амплитуда колебания несущей частоты при ЧМ в отличие от АМ зависит от амплитуды им модулирующего сигнала и при некоторых значениях индекса (3 обращается в нуль. Поскольку ширина спектра частотно-модулированного сигнала намного больше, чем амплитудно-модулированного, ЧМ используют в диапазоне метровых волн, соответствующем частотам от 50 МГц и выше.
Основным достоинством ЧМ является высокая помехоустойчивость. Обусловлено это главным образом тем, что амплитуда частотно- модулированного сигнала постоянна и, следовательно, аддитивные помехи на нее не влияют. Кроме того, вследствие постоянства амплитуды частотно- модулированного сигнала его мощность изменяется незначительно. Еще одним достоинством ЧМ является наличие дополнительных линий в спектре сигнала, что повышает надежность связи.
Фазовой модуляцией (ФМ) называется способ модуляции, при котором фаза колебания с несущей частотой изменяется в зависимости от амплитуды ым модулирующего сигнала. Модулированный сигнал при ФМ колебания с
несущей частотой ω0 гармоническим
сигналом
![]() /
имеет вид
/
имеет вид
![]()
где
![]() — индекс ФМ, характеризующий максимальное
отклонение фазы модулированного сигнала
от фазы исходного.
— индекс ФМ, характеризующий максимальное
отклонение фазы модулированного сигнала
от фазы исходного.
Несущая частота при ФМ, как и при ЧМ, непостоянна и определяется согласно выражению
![]()
Девиация частоты
![]() при ФМ зависит от частоты модулирующего
сигнала
при ФМ зависит от частоты модулирующего
сигнала
![]() .
Если модулирующий сигнал мм гармонический,
то спектры фазово- и частотно-модулированного
сигналов практически одинаковы.
.
Если модулирующий сигнал мм гармонический,
то спектры фазово- и частотно-модулированного
сигналов практически одинаковы.
В противном случае законы изменения
фазы и частоты сигнала оказываются
различными. Для ФМ с небольшим индексом
![]() спектр
боковых частот практически такой
же, как и при АМ.
спектр
боковых частот практически такой
же, как и при АМ.
Проведенный обзор способов непрерывной
модуляции позволяет сделать вывод,
что качественное различие существует
лишь между АМ, с одной стороны, и ЧМ или
ФМ — с другой. Для всякого закона
изменения частоты всегда может бьпь
указан эквивалентный закон изменения
фазы. В отличие от АМ глубина ЧМ и ФМ,
характеризуемая соответственно
индексами (![]() ,
не изменяет средней мощности модулированного
сигнала, в то время как ширина спектра
этого сигнала увеличивается с возрастанием
глубины модуляции.
,
не изменяет средней мощности модулированного
сигнала, в то время как ширина спектра
этого сигнала увеличивается с возрастанием
глубины модуляции.
В ЛС наряду с непрерывной модуляцией
широко применяют импульсную модуляцию
(ИМ) сигналов. В этом случае переносчиком
сигнала служит последовательность
импульсов, каждый из которых обычно
представляет собой цуг колебаний с
высокой несущей частотой, Данная
последовательность используется в
схемах ИМ, где параметры импульсов
модулируются сигналом. Частота
посылок импульсов, называемая частотой
дискретизации
![]() ,
определяется спектром передаваемого
сигнала и должна по крайней мере в 2—3
раза превышать верхнюю частоту спектра
модулирующего сигнала. В этом случае
возможна демодуляция сигнала, т. е.
выделение необходимой информации из
импульсно-модулированного сигнала.
Так, для разборчивого воспроизведения
речевых сообщений достаточно передавать
спектр частот 0,1 — 3 кГц, что требует
обеспечения частоты дискретизации 8...
10 кГц. По сравнению с гармоническими
колебаниями импульсы характеризуются
большим числом параметров, поэтому
видов ИМ значительно больше. Кроме
амплитуды, частоты и фазы различают
длительность (или ширину) импульсов
т и их скважность Использование импульсов
с большой
,
определяется спектром передаваемого
сигнала и должна по крайней мере в 2—3
раза превышать верхнюю частоту спектра
модулирующего сигнала. В этом случае
возможна демодуляция сигнала, т. е.
выделение необходимой информации из
импульсно-модулированного сигнала.
Так, для разборчивого воспроизведения
речевых сообщений достаточно передавать
спектр частот 0,1 — 3 кГц, что требует
обеспечения частоты дискретизации 8...
10 кГц. По сравнению с гармоническими
колебаниями импульсы характеризуются
большим числом параметров, поэтому
видов ИМ значительно больше. Кроме
амплитуды, частоты и фазы различают
длительность (или ширину) импульсов
т и их скважность Использование импульсов
с большой
скважностью позволяет в рамках одного частотного канала (т. е. при одной и той же частоте дискретизации) сформировать несколько информационных каналов. Например, если в рассмотренном выше случае ограничить длительность импульса значением 1 мке, т. е. при частоте дискретизации 10 кГц обеспечить скважность, равную 100, то можно сформировать несколько десятков каналов передачи речевых сообщений. Этот подход, получивший название временной селекции, характерен для многоканальных систем связи. Обычно в ЛС применяют модуляцию импульсами прямоугольной или
колоколообразной формы с
![]() .
.
Наибольшее распространение получили амплитудно-, частотно-, широт- но- и фазово-импульсный, а также импульсно-кодовый способы модуляции сигналов.
Вид сигнала на выходе излучателя ЛС дан на рисунке. При фазово-импульсной модуляции импульсы, имеющие постоянную амплитуду и длительность, смещаются относительно некоторых фиксированных моментов времени в сторону опережения или отставания на временные интервалы, пропорциональные мгновенным значениям передаваемого сигнала. Вид сигнала на входе приемника ЛС после прохождения через среду распространения показан на рис. 5.7, д, а тот же сигнал после фильтрации и детектироваиия — на рис. 5.7, е. Помехоустойчивость ЛС возрастает при использовании фазово- и кодово-импульсной модуляции сигналов. Последняя приобретает особое значение в связи с активным развитием систем цифровой связи. К недостаткам ИМ по сравнению с непрерывной можно отнести большую ширину спектра сигнала и сложность технической реализации.
Для восстановления информации из модулированных сигналов применяют схемы демодуляции. Рассмотрим демодуляцию амплитудно-моду- лированного и частотно-модулированного сигналов В первом случае используют методы амплитудного детектирования, во втором — частотной демодуляции.
Основными элементами амплитудного детектора (рис 5.8, а) являются
усилитель
![]() ,
диод
,
диод
![]() и фильтр низкой частоты, построенный
на основе
и фильтр низкой частоты, построенный
на основе
RC-контура. Эмиттерный
повторитель
![]() служит для снижения выходного
служит для снижения выходного
сопротивления схемы. Подадим на вход
усилителя
![]() амплитудно-модулированный
сигнал вида
амплитудно-модулированный
сигнал вида
![]() ,
,
где Uо — амплитуда
напряжения модулирующего сигнала.
Обозначая
![]() и полагая φ = 0, получаем
и полагая φ = 0, получаем
![]()
Если соотношение элементов фильтра
удовлетворяет условию
![]()
![]() ,
то на выходе схемы имеем
,
то на выходе схемы имеем
![]()
где — динамическая чувствительность
схемы
![]()
Постоянную составляющую детектируемого напряжения устраняем
с помощью фильтра верхних частот на конденсаторе С. Графическая иллюстрация работы детектора представлена на рис. 5.8, б.
Одной из схем частотной демодуляции является частотный дискриминатор (детектор наклона), принцип работы которого основан на пропорциональном изменении амплитуды напряжения на колебательном контуре с элементами R, L и С при вариациях мгновенных значений частоты модулированных колебаний.
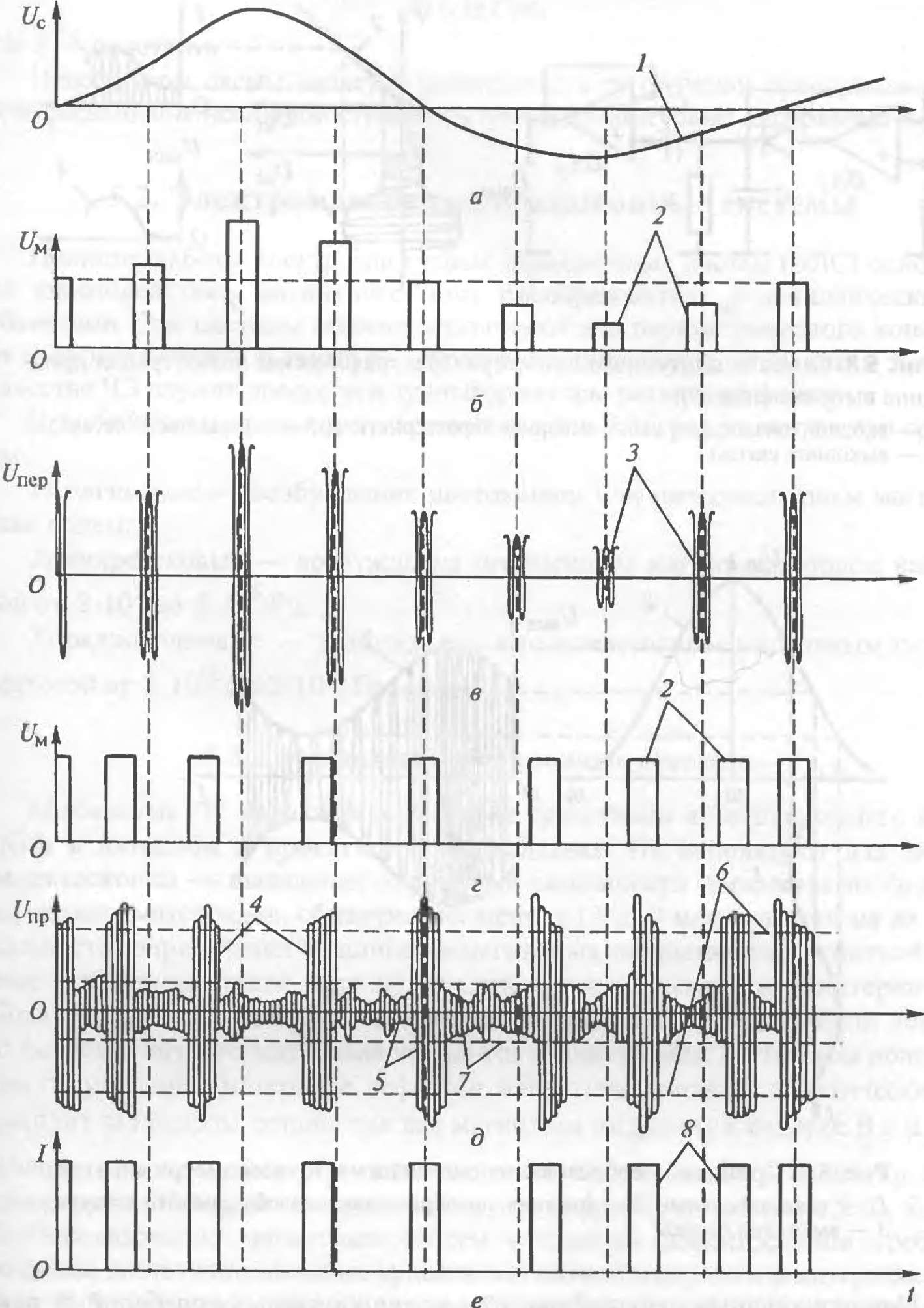
Примеры амнлитудно- (а—в) и фазово-импульсной (г—е) модуляции сигнала:
/ — модулирующий сигнал; 2 — модулированный сигнал, 3 — импульсы на выходе излучателя, 4 — импульсы на входе приемника; 5 — шум; 6,7 — верхний и нижний пороги ограничения амплитуды сигнала; 8 — импульсы после ограничения и фильтрации
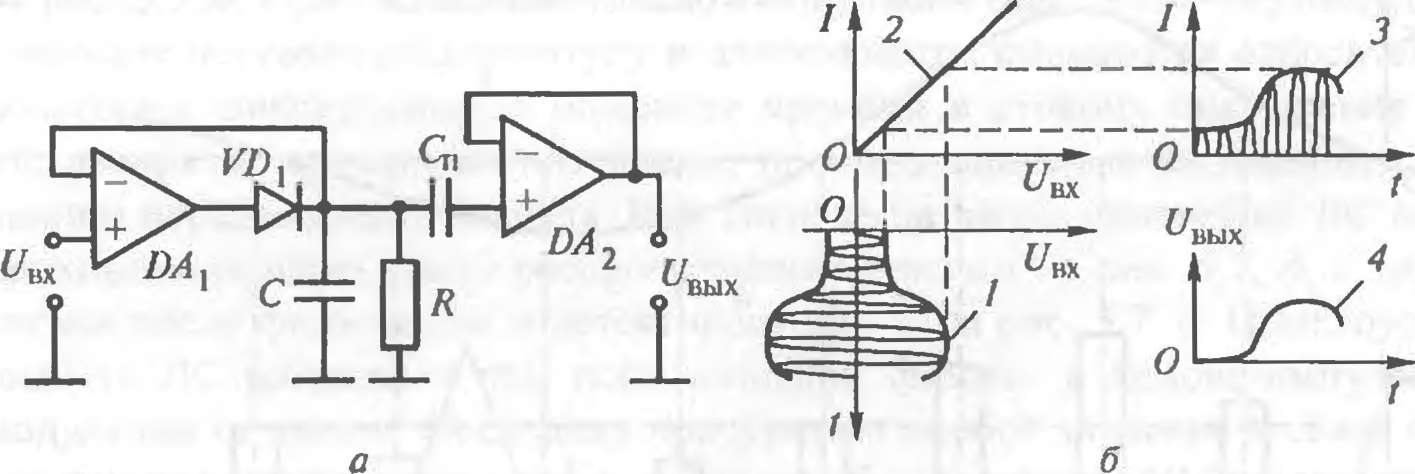
Схема амплитудного детектора (а) и графическая иллюстрация принципа выпрямления (б):
/ — входной сигнал, 2 — вольг-амперная характеристика; 3 — сигнал после детектора; 4 — выходной сигнал
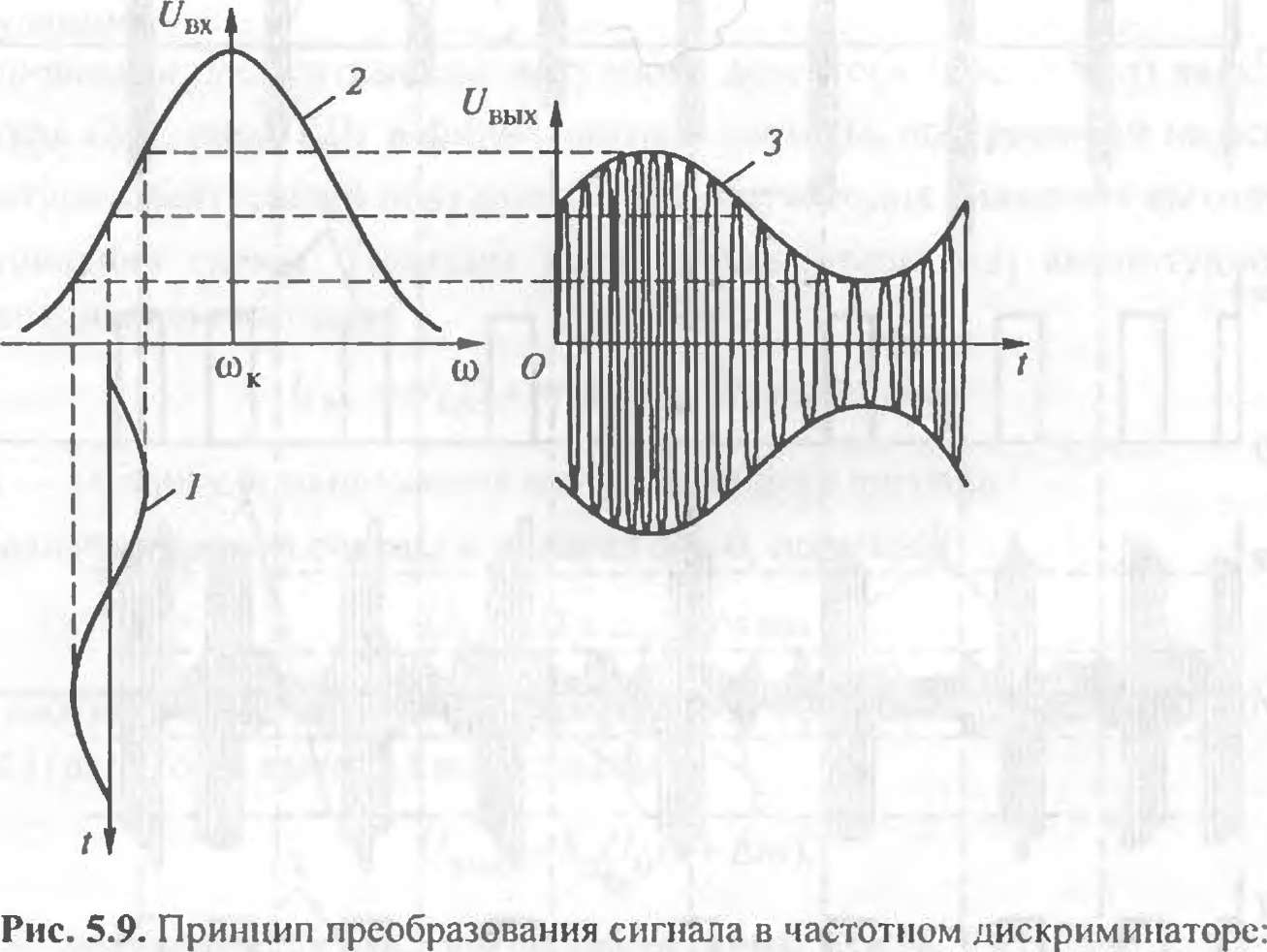
У — входной сигнал; 2 — функция преобразования колебательного контура; 3 — выходной сигнал
При отклонениях несущей частоты модулированных колебаний от резонансной частоты сок контура изменяется амплитуда выходного сигнала
С/ВЬ1Х, причем влияние модулированных колебаний тем слабее, чем острее резонансная кривая (рис. 5.9). Резонансные свойства контура зависят от его добротности 0, определяемой выражением
![]()
где к — константа.
Недостатком схемы является нелинейность ее функции преобразования. Для уменьшения нелинейности используют двухконтурные дискриминаторы.
5.2. Электромагнитные локационные системы
Принцип работы электромагнитных локационных систем (ЭЛС) основан на взаимодействии магнитного поля преобразователя с металлическими объектами. Эти системы обычно используют для параметрического контроля и дефектоскопии, а также для измерения расстояний, вибраций и т. п. В качестве ЧЭ служат дроссели и трансформаторы различной формы.
В зависимости от частоты магнитного поля ЭЛС разделяют на три группы:
магнитные — возбуждение постоянным или низкочастотным магнитным полем;
вихретоковые — возбуждение переменным магнитным полем частотой от 2 • 102 до 5 106Гц;
радиоволновые — возбуждение высокочастотным магнитным нолем
частотой от
![]() .
.
5.2.1. Магнитные локационные системы
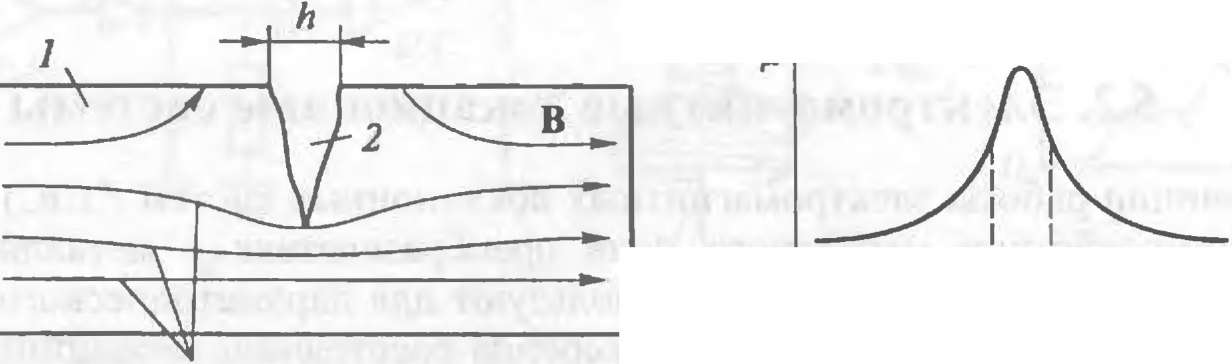
Магнитные ЛС являются основными средствами неразрушающего контроля в литейном и прокатном производствах. Их используют для задач дефектоскопии — выявления нарушений сплошности предметов из ферромагнитных материалов, обнаружения мелких (3...10 мкм) трещин на их поверхности, определения толщины немагнитных покрытий на магнитной основе и толщины стенок изделий из магнитных и немагнитных материалов. Принцип магнитной дефектоскопии иллюстрирует рис. 5.10, а. Если деталь из ферромагнитного материала находится в однородном магнитном поле, то при отсутствии в материале дефектов магнитный поток Ф практически не выходит за пределы детали, так как магнитная индукция в воздухе В в р. раз
меньше, чем в металле. Следовательно, магнитное сопротивление трещины шириной к будет намного выше, чем ферромагнетика (рис. 5.10, б).
Использование магнитных систем в задачах дефектоскопии требует создания достаточно высоких уровней магнитной индукции в материале детали. Поэтому определяющее значение приобретают собствешю магнитные характеристики материала, для оценки которых используют такие параметры, как остаточная индукция #осх, намагниченность Е и магнитная восприимчивость <;. Намагниченность представляет собой векторную величину, характеризующую состояние материала при воздействии на него магнитного поля напряженностью Н:
где Мц — магнитный момент единицы объема V тела.
Рис. 5.10. Распределение магнитного поля (а) и изменение магнитного сопротивления (б) в области дефекта: 1 — деталь; 2 — трещина; 3 — магнитные линии
Индукцию в намагниченном материале определяют ио формуле
В =
![]()
Магнитная восприимчивость ζ характеризует
способность материала намагничиваться
в магнитном поле и ζ=
![]() .
Для всех металлов ζ зависит от магнитной
проницаемости
.
Для всех металлов ζ зависит от магнитной
проницаемости
![]() причем для диамагнетиков
причем для диамагнетиков
![]() ,
а для парамагнетиков
,
а для парамагнетиков
![]() .
Поскольку в обоих случаях |1 не зависит
от напряженности магнитного поля и мало
отличается от единицы, значения магнитной
восприимчивости для диа- и парамагнетиков
весьма малы:
.
Поскольку в обоих случаях |1 не зависит
от напряженности магнитного поля и мало
отличается от единицы, значения магнитной
восприимчивости для диа- и парамагнетиков
весьма малы:
![]() соответственно.
Магнитные дефектоскопы позволяют
обнаруживать подповерхностные трещины
и раковины на глубине до 20 мм.
соответственно.
Магнитные дефектоскопы позволяют
обнаруживать подповерхностные трещины
и раковины на глубине до 20 мм.
Магнитные ЛС применяют также для измерения зазоров в магнитных цепях. В системах этого типа используют как индуктивные, так и индукционные датчики. В первых вариация магнитного сопротивления зазора вызывает изменение индуктивности катушки, во вторых — ЭДС индукции. В простейших магнитных системах катушка внешним источником питания не возбуждается; при этом выходной сигнал возникает только при движении объекта относительно датчика. На этом принципе построены магнитные головки разных типов, использующиеся в системах магнитной записи сигналов. Для повышения эффективности магнитных головок их сердечник выполняют из материала с большой магнитной проницаемостью (феррита, пермаллоя и др.). В системах измерения зазоров или малых расстояний головка содержит две катушки — первичную и вторичную, при этом первая является катушкой возбуждения и питается от внешнего источника напряжения, а вторая — сигнальной.
Пример использования индукционной
головки наведения для управления
подвижным мобильным средством приведен
на рис. 5.11, а. Головка включена в состав
навигационной системы транспортной
тележки, перемещающейся внутри цеха
вдоль уложенных под полом металлических
шин. Катушка возбуждения создает
высокочастотное электромагнитное поле,
которое на поверхности металлической
шины наводит соответствующее магнитное
поле, под действием которого во вторичных
(сигнальных) катушках генерируются
переменные напряжения. Обмотки катушек
соединены дифференциально, в результате
чего их суммарный сигнал (![]() соответствует разности напряжений в
каждой катушке. Угловое рассогласование
а вызывает на выходе фазочувствителыюго
выпрямителя сигнал
соответствует разности напряжений в
каждой катушке. Угловое рассогласование
а вызывает на выходе фазочувствителыюго
выпрямителя сигнал
![]() ,
амплитуда которого пропорциональна
напряжению
,
амплитуда которого пропорциональна
напряжению
![]() ,
а знак соответствует
,
а знак соответствует
фазе а (рис. 5.11, б). В некоторой зоне
измерения при
![]() < ±40° достигается линейность функции
преобразования головки наведения
< ±40° достигается линейность функции
преобразования головки наведения
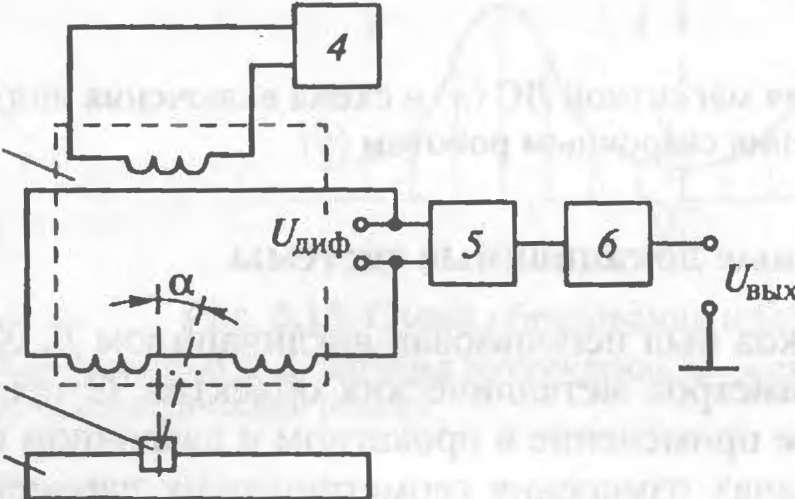
. Схема индукционной головки наведения (а) и се функция преобразования (б):
1 — поверхность пола, 2 — металлическая шина, 3 —датчик, 4 — генератор; 5 — приемник, 6 — фазочувст витсльный выпрямитель
В робототехнике магнитные ЛС с индуктивными датчиками широко используют для определения расстояния до металлического объекта. На рис 5.12 представлена функция преобразования и схема включения индуктивного датчика в контур управления сварочным роботом. Выходные сигналы поступают в регулятор привода, который перемещает исполнительный орган (сварочную головку) по соответствующей оси до тех пор, пока не будет достигнуто требуемое расстояние /раб между электродом и поверхностью заготовки. Это расстояние, определяемое эмпирически, составляет в среднем 6; 4 и 3 мм для черных металлов, алюминия и меди соответственно. Погрешность позиционирования головки при отслеживании траектории равна ± 0,4 мм.
К достоинствам магнитных ЛС можно отнести простоту конструкций, большую глубину зоны контроля, высокую надежность (на показания датчика практически не влияют климатические факторы и загрязнение поверхности), к недостаткам — низкую разрешающую способность и нелинейность функции преобразования
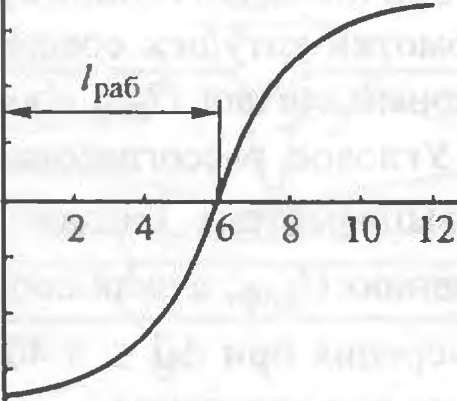
Функция преобразования магнитной ЛС (а) и схема включения индуктивного датчика в контур управления сварочным роботом (б)
Вихретоковые локационные системы
Впервые датчик вихревых токов был использован англичанином Д. Хыо- зом в 1879 г. для сравнения параметров металлических объектов. С тех пор вихретоковые ЛС нашли широкое применение в прокатном и сварочном производствах, на транспорте, в задачах измерения геометрических параметров быстропротекающих процессов движения и др. Системы этого типа работают в условиях активного воздействия внешней среды (при значительных перепадах температур и влажности, в агрессивных средах и т. д.).
Работа вихретоковой ЛС основана на
взаимодействии внешнего магнитного
поля с электромагнитным полем вихревых
(замкнутых) токов, наводимых возбуждающей
катушкой в любом электропроводящем
объекте1. Синусоидальный или импульсный
ток, действующий в катушке возбуждения
датчика, создает электромагнитное поле,
которое вызывает вихревые токи в
материале объекта. Электромагнитное
поле этих токов воздействует на
сигнальную катушку, наводя в ней ЭДС.
В простейших схемах (без сигнальной
катушки) вихревые токи воздействуют
непосредственно на катушку возбуждения.
Сила / вихревых токов, возбужденных в
изделии, определяется уравнением
Максвелла
![]() и
зависит от частоты тока обмотки
возбуждения, материала объекта (его
удельного электросопротивления р и
магнитной проницаемости μ), а также
расстояний между катушками и объектом.
Принцип формирования вихревых токов
в материале был открыт в 1825 г Д. Араго и
развит впоследствии его учеником Л.
Фуко.
и
зависит от частоты тока обмотки
возбуждения, материала объекта (его
удельного электросопротивления р и
магнитной проницаемости μ), а также
расстояний между катушками и объектом.
Принцип формирования вихревых токов
в материале был открыт в 1825 г Д. Араго и
развит впоследствии его учеником Л.
Фуко.
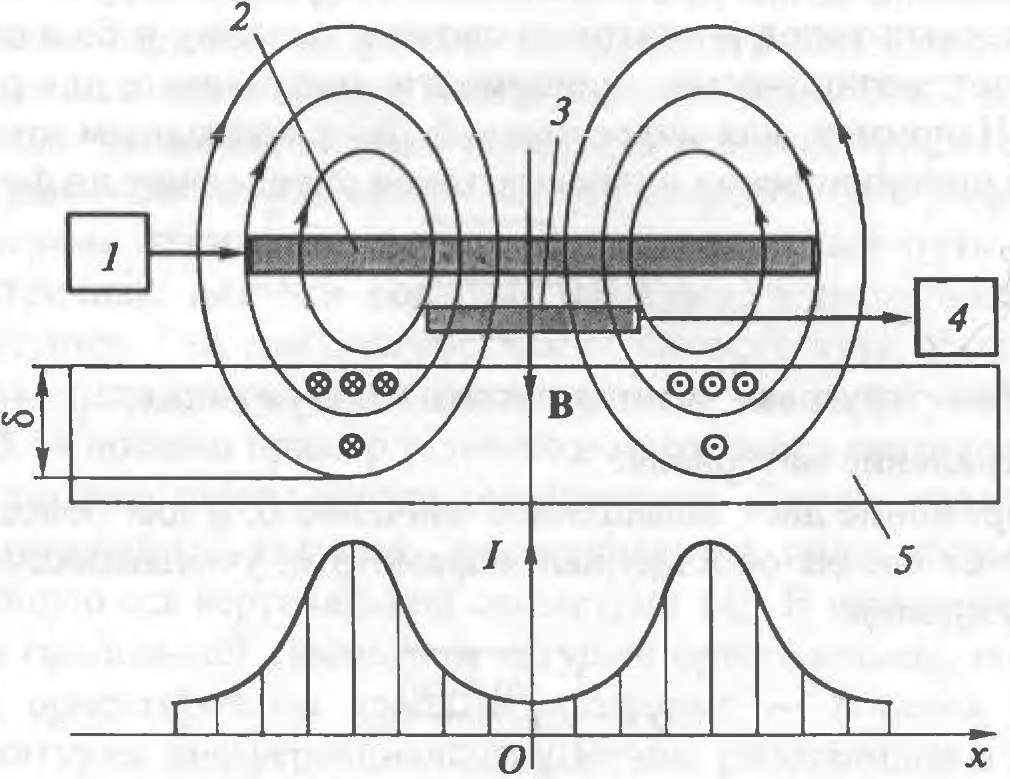
Схема образования и эпюра вихревых токов
контроля, что требует устранения постоянной составляющей, обусловленной катушкой возбуждения. При ортогональном же расположении катушек ток в сигнальной катушке наводится только вихревыми токами, однако и уровень выходного сигнала при этом будет ниже, чем в первом и втором случаях.
Расчет вихревых токов достаточно сложен,
поэтому в большинстве случаев
используют эмпирические зависимости,
полученные для разных частных случаев.
Например, для вихретоковой ЛС с накладным
преобразователем глубину 8 проникновения
вихревых токов определяют по формуле![]()
где![]() круговая частота тока возбуждения; р —
удельное
круговая частота тока возбуждения; р —
удельное
электросопротивление материала.
Данное выражение дает завышенное значение 5, и для более точных измерений в расчет вводят обобщенный параметр учитывающий диаметр (I катушки возбуждения:
![]()
Следовательно,
![]()
Значение δ глубины проникновения вихревых токов тем ближе к реальному, чем больше параметр г), например диаметр катушки возбуждения. При работе в диапазоне частот 0,1... 10 кГц для большинства металлов 5 < 0,5...5 мм и уменьшается с увеличением частоты.
В дефектоскопии с помощью вихревых токов удается обнаружить трещины наружного и внутреннего зале1ания длиной 1...2 мм и глубиной 0,1...0,3 мм, раковины с глубиной залегания до 6 мм, неметаллические включения. Вихретоковые ЛС позволяют измерять толщину покрытий в диапазоне 0,001.. 1,0 мм. Для увеличения глубины проникновения вихревых токов применяют специальные меры. Например, создавая в материале магнитное насыщение (уменьшая его магнитную проницаемость), увеличивают глубину проникновения вихревых токов до 10 мм.
Особенностью вихретоковых ЛС является их многопараметричность, так как ЭДС преобразователя зависит от разных характеристик объекта контроля и окружающей среды, неявно влияющих на выходной сигнал. Это обстоятельство определяет как достоинства, так и недостатки таких систем. Существенным недостатком всех многокомпонентных вихретоковых датчиков является высокий коэффициент влияния информационных каналов (Л'у ~ 12. .20 %). Для
компенсации интегрального влияния внешних факторов, вызывающих дополнительную погрешность системы, в ее состав включают компенсационную катушку, на которую действуют те же факторы, что и на рабочие катушки, кроме непосредственно измеряемого параметра. Суммируя сигналы с катушек с помощью дифференциального усилителя (см. 2.3) можно существенно уменьшить дополнительную погрешность.
В задачах многопараметрического контроля, когда приходится измерять сразу несколько параметров, удобно использовать многокомпонентные вих- ретоковые датчики, получившие название матричных. ЭЛС, построенные на базе матричных датчиков, широко используют для контроля геометрических параметров движущихся узкопрофильных поверхностей с разрывами и уступами. Примерами таких объектов являются рельсовый путь и контактный провод. Матричные датчики содержат не одну, а несколько (матриц) сигнальных катушек. Так, для диагностики рельсового пути обычно применяют четыре-шесть, а для контроля состояния провода — две катушки.
На рис. 5.14 показан пример установки матричного вихретокового датчика накладного топа на шасси вагона-дефектоскопа. Датчик представляет собой несколько идентичных катушек, намотанных на прямоугольный каркас и имеющих общую ось вертикальной симметрии Ог. В горизонтальной плоскости хОу оси продольной симметрии катушек ортогональны, поэтому некоторые из них ориентированы вдоль, а некоторые — поперек рельса. Схема включения катушек дифференциальная. Датчик, работающий в диапазоне частот 0,1... 1,0 МГц, располагают непосредственно под вагоном на фиксированном расстоянии над контролируемым рельсом. На рис. 5.14, а контролируемые параметры пути обозначены так: Ах, АН — смещение оси рельса в боковом и вертикальном направлении соответственно; Дг, Ду — изменение высоты и зазор в стыке рельсов. На рис. 5.14, б показан боковой износ рельса Аг.
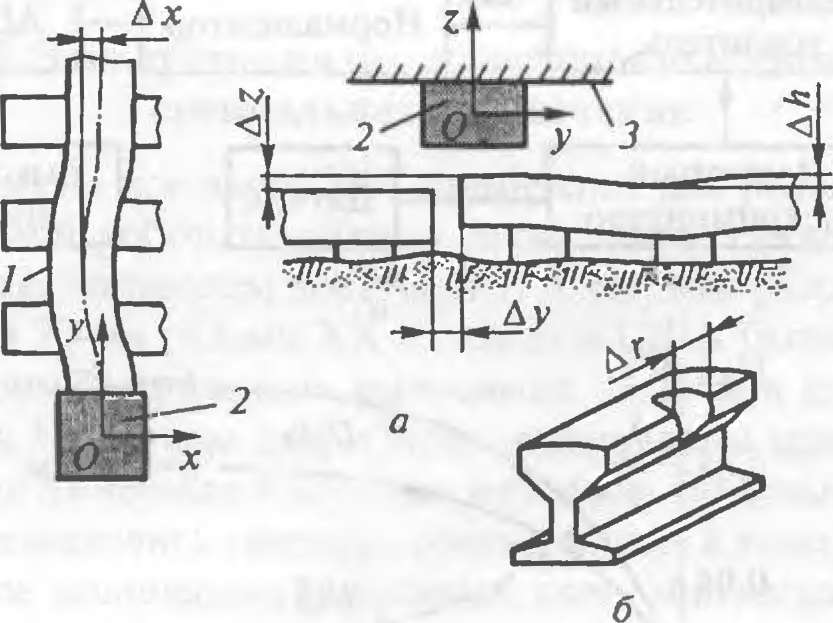
Схема установки матричного вихретокового датчика «Спектр» (с) и боковой износ рельса (б): / — рельсовая колея; 2 — датчик; 3 — вагон-дефектоскоп
В матричных датчиках осуществляется разделение измеряемых факторов. Например, кагушки, у которых в плоскости хОу оси продольной симметрии перпендикулярны оси рельса, наиболее чувствительны к изменению параметров Дг, Ду и АН, а катушки, у которых эти оси параллельны оси рельса — к па- раметрам Ах и Аг. Рассмотренная система установлена в передвижной лаборатории комплексной диагностики пути, способной проводить контроль при скорости движения вагона по железнодорожной магистрали до 80 км/ч
Другой распространенной областью применения вихретоковых ЛС является сварочное производство, где их используют для слежения за сварочным швом. Многокомпонентный вихретоковый датчик измеряет параметры взаимного положения свариваемых деталей и сварочной головки: расстояние от центра датчика до объектов сварки или линии шва, ширину шва и др.
Важной областью применения вихретоковых ЛС является также нераз- рушающий контроль изделий металлургической промышленности. Поскольку структурное состояние металлов влияет на их электрические и магнитные свойства, оказывается возможным контролировать не только сплошность материала, но и его химический состав, а также качество термической обработки и состояние поверхностного слоя после механической обработки. Схема такой системы для автоматизации процесса контроля сплошности отливок и се функции преобразования представлены на рис. 5.15. Система включает несколько разнотипных вихретоковых датчиков, что позволяет детерминировать различные дефекты: длину I и толщину И наружных царапин, глубину 6 залегания трещин и т. д. Выходным сигналом датчика является изменяющаяся частота генерации, которая с помощью частотного дискриминатора преобразуется в аналоговый амплитудный сигнал Цпых, пропорциональный измеряемому параметру. Заметим, что функции преобразования данной системы нелинейны (см. рис. 5.15, б). Для их линеаризации в схеме используется нормализатор.
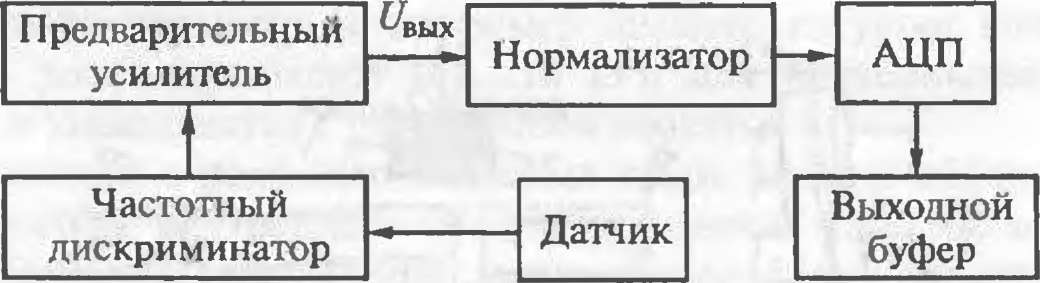
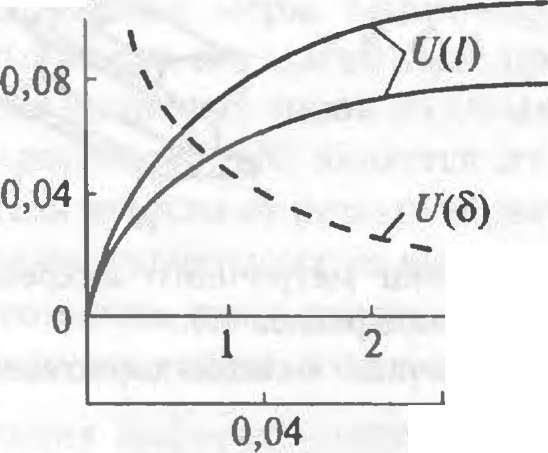
Схема вихретоковой системы для контроля качества отливок (а) и ее функции преобразования (б)
Модель |
Измеряемый параметр |
Диапазон измерений |
е, % |
/в, кГц |
Р, Вт |
Размеры, мм |
т, кг |
|||
а |
/ |
Ь |
И |
|||||||
дсм- |
Глубина |
2 мм |
5 |
1000 |
10 |
— |
230 |
270 |
150 |
2,7 |
0,1/1 |
залегания |
|
|
|
|
|
|
|
|
|
(Россия) |
трещины |
|
|
|
|
|
|
|
|
|
ВМ-10Н |
Шерохова |
0,3 мм |
3 |
100 |
0,1 |
— |
160 |
110 |
50 |
0,5 |
(Россия) |
тость |
|
|
|
|
|
|
|
|
|
|
поверхности |
|
|
|
|
|
|
|
|
|
|
Вибрации |
0,02...20 Гц |
2 |
100 |
» |
- |
160 |
110 |
50 |
0.5 |
Т(} -403 |
Расстояние |
1... 13 мм |
5 |
20 |
Н.д. |
20 |
65 |
|
„ |
0.25 |
(Швейца |
до |
|
|
|
|
|
|
|
|
|
рия) |
объекта |
|
|
|
|
|
|
|
|
|
МТП-01 |
Толщина |
0,2... 10 мм |
5 |
Н.д. |
0,4 |
— |
220 |
130 |
150 |
1,5 |
(Россия) |
покрытия |
|
|
|
|
|
|
|
|
|
Основные параметры вихретоковых ЛС
К достоинствам вихретоковых ЛС можно отнести надежность, простоту конструкций и высокую разрешающую способность; к недостаткам — нелинейность функции преобразования, низкую точность измерений, сравнительно малую глубину зоны контроля.