

Лекция №20 Программируемые логические контроллеры.
Основная задача АСУ ТП – это выполнение алгоритмов автоматизированного управления технологическим процессом. Очевидно, что система должна иметь специальный интерфейс подключения к самому процессу для сбора необходимых параметров и передачи управляющих воздействий. Таким связующим звеном и является ввод/вывод (IO). К подсистеме ввода/вывода подключаются как датчики, измеряющие необходимые параметры технологического процесса, так и исполнительные механизмы, с помощью которых система управления может вносить корректировки в ход процесса.
На рисунке 11.1 приведена упрощенная схема узла ввода/вывода.

Рис. 11.1. Узел распределенного ввода/вывода (Distributed IO)
Узел ввода/вывод состоит из 3 главных компонентов:
• Задней базовой панели, бейсплейта (Baseplate). Ее не видно на рисунке;
• Модулей ввода/вывода (IO modules);
• Интерфейсного модуля (Interface Module).
На базовую панель в специальные слоты устанавливаются модули ввода/вывода и интерфейсный модуль. Количество слотов под установку модулей ввода/вывода может быть разным, но, как правило, четное количество. Чаще всего крайний левый слот предназначен для установки только интерфейсного модуля. Запитывается узел от внешнего блока питания с выходным напряжением 24 V DC. Внутри базовой панели проходят две шины: одна служит для подачи питания на установленные модули; другая - для информационного обмена между модулями.
На рисунке 11.2 фото узла ввода/вывода модели 2500 производства компании Eurotherm.
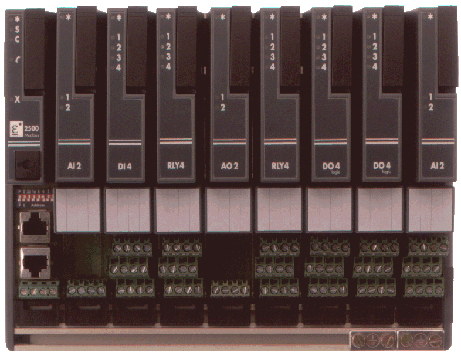
Рис 11.2. Узел распределенного ввода/вывода IO2500.
На базовой панели расположено 8 модулей ввода/вывода и один интерфейсный модуль в данном случае с интерфейсом Profibus DP.
Станция ввода/вывода серии ET200M производства Siemens изображена на рисунке 11.3.

Рис. 11.3. Узел распределенного ввода/вывода ET200M.
На базовой панели установлено 6 модулей ввода/вывода, один интерфейсный модуль и блок питания (слева направо).
Типы модулей
Как видно из рисунка 11.1, к модулям ввода/вывода с помощью электрических кабелей подключаются датчики и исполнительные механизмы. В зависимости от того, служит ли модуль для ввода сигналов с датчиков в систему управления или выводит управляющие сигналы на исполнительные устройства, модули осуществляют, соответственно, аналого-цифровое или цифро-аналоговое преобразование.
Модули ввода/вывода:
• Модули аналогового ввода (AI, analogue input). Они принимают от датчиков, подключенных к его входам, электрические сигналы унифицированного диапазона, например: 0-20 или 4-20 mA (токовый сигнал); 0-10 V или 0-5 V (потенциальный сигнал); миливольтовый сигнал от термопар (TC); сигнал от термосопротивлений (RTD).
Допустим, у нас есть датчик давления с диапазоном измерений 0-6 бар и токовым выходом 4-20 mA. Датчик измеряет давление P, которое в данный момент равно 3 бар. Так как датчик линейно преобразует значение измеряемого давления в токовый сигнал, то на выходе датчика будет:
I вых = 4 + 3/6*(20-4) = 12 mA;
Вход модуля AI, настроенный на те же диапазоны (4-20 mA и 0-6 бар), принимает сигнал 12 mA и делает обратное преобразование:
P = 6*(12-4)/16 = 3 бар.
Соответствие диапазона электрического сигнала между входом модуля и выходом подключенного к нему датчика обязательно для корректной работы системы.
• Модули дискретного ввода (DI, discrete input). Принимают от датчиков дискретный электрический сигнал, который может иметь только два значения: или 0 или 24 V (в редких случаях 0 или 220 V). Вход модуля DI также может реагировать на замыкание/размыкание контакта в подключенной к нему цепи. К DI обычно подключают датчики контактного типа, кнопки ручного управления, статусные сигналы от систем сигнализации, приводов, позиционирующих устройств и т.д.
Допустим, у нас есть насос. Когда он не работает, его статусный (выходной) контакт разомкнут. Соответствующий дискретный вход модуля DI находится в состоянии “0”. Как только насос запустили, его статусный контакт замыкается, и напряжение 24 V идет на клеммы входа DI. Модуль, почуяв напряжение на дискретном входе, переводит его в состояние “1”.
• Модули дискретного вывода (DO, discrete output). В зависимости от внутреннего логического состояния выхода (“1” или “0”) возбуждает на клеммах дискретного выхода или снимает с них напряжение 24 V. Есть вариант, когда модуль в зависимости от логического состояния выхода просто замыкает или размыкает внутренний контакт (модуль релейного типа).
Модули DO могут управлять приводами, отсечными клапанами, зажигать светосигнальные лампочки, включать звуковую сигнализацию и т.д.
• Модули аналогового вывода (АО, analogue output). Действуют как AI, только в обратном направлении.
Допустим, у нас есть регулирующий клапан с управляющим входом 4-20 mA. Мы хотим открыть его наполовину (т.е. на 50%). Выход АO, к которому подключен вход клапана, генерирует ток I вых:
I вых = 4 + (20-4)*0.5 = 12 mA;
Клапан, почуяв на своем входе ток 12 mA, переходит на 50% открытия.
Соответствие диапазона электрического сигнала между выходом модуля и входом подключенного к нему исполнительного механизма обязательно.
Модуль ввода/вывода также характеризуются канальностью – числом входов/выходов, а следовательно, и количеством сигнальных цепей, которые к нему можно подключить. Например, модуль AI4 – это четырехканальный модуль аналогового ввода. К нему можно подключить 4 датчика. DI16 – шестьнадцатиканальный модуль дискретного ввода. К нему можно подключить 16 статусных сигналов с какого-нибудь агрегата.
В современных системах расположение модулей ввода/вывода на бейсплейте строго не регламентировано, и их можно устанавливать в произвольном порядке. Однако один или несколько слотов, как правило, зарезервированы под установку интерфейсного модуля. Иногда на бейсплейте возможна установка сразу двух интерфейсных модулей, работающих параллельно. Это делается для повышения отказоустойчивости системы ввода/вывода.
Одним их жестких требований, предъявляемых к современным подсистемам ввода/вывода, – это возможность “горячей” замены модулей без отключения питания (функция hot swap).
Коммуникация между контроллером и подсистемой ввода/вывода
Такая коммуникация возможна благодаря интерфейсному модулю, поддерживающему один из принятых коммуникационных протоколов. Обмен данными осуществляется по специальным цифровым шинам, таким как: Profibus DP, Modbus RTU, Modbus +, CAN, DeviceNet, ControNet и т.д. Вообще, насчитывается более 50 стандартов промышленных шин.
Коммуникационная шина работает по принципу ведущий-ведомый (master-slave). Только ведущее устройство на шине может инициировать обмен данными. Ведомые устройства пассивно прослушивают все данные, идущие по шине, и только в случае получения запроса от ведущего устройства отправляют обратно ответ. Каждое устройство на шине имеет свой уникальный сетевой адрес, необходимый для однозначной идентификации. Узлы ввода/вывода, как правило, являются ведомыми устройствами, в то время как контроллеры – ведущими.
На рисунке 11.4 показана цифровая шина, объединяющая один контроллер (в виде телевизора) и четыре узла ввода/вывода.
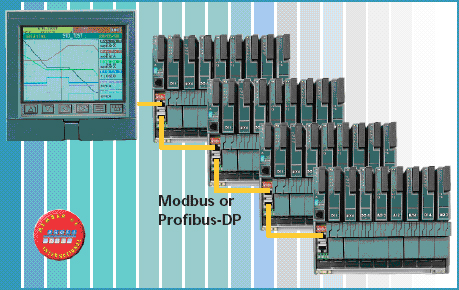
Рис. 11.4. Шина ввода/вывода
Разберем пример 1. Контроллер с адресом 1 хочет считать показание датчика давления в котле. Он знает, что этот датчик подключен к бейсплейту (узлу) с сетевым адресом 5, модулю AI в слоте 6, каналу (входу) 12. Он формирует запрос к ведомому устройству (узлу ввода/вывода) следующего содержания:
![]()
Узел 5, прослушивая все запросы на шине, узнает тот, что адресован ему. Он считывает показания датчика давления и формирует в ответ следующее сообщение:
![]()
Контроллер, получив ответ от ведомого устройства, сканирует поле “данные c датчика” и начинает математическую обработку.
Пример 2. Пусть после обработки данных с датчика контроллер решил, что надо открыть выпускной клапан на 50%. Клапан подключен к узлу ввода/вывода 7, модулю AO в слоте 3, каналу 2. Контроллер формирует команду следующего содержания:
![]()
Узел 7, прослушивая шину, натыкается на команду, адресованную ему. Он записывает значение уставки 50% в регистр, соответствующий слоту 3, каналу 2. Сразу же модуль АО формирует на выходе 2 нужный электрический сигнал и выдает его клапану на исполнение. Далее узел 7 высылает обратно контроллеру подтверждение успешного выполнения команды.
![]()
Контроллер получает ответ от узла 7 и считает, что команда выполнена.
Это всего лишь упрощенная схема взаимодействия контроллера с узлами ввода/вывода. В реальных АСУ ТП, наряду с рассмотренными выше, используется множество диагностических, управляющих и сервисных сообщений. Хотя сам принцип “запрос-ответ” (“команда-подтверждение”), реализованный в большинстве полевых протоколов, остается неизменным.
На рисунке 11.5 представлен ПЛК серии ControlLogix производства Rockwell Automation. Как видно, контроллерные модули и ввод/вывод располагаются на одном бейсплейте. Общение меду ними происходит по внутренней шине данных, встроенной в базовую панель.
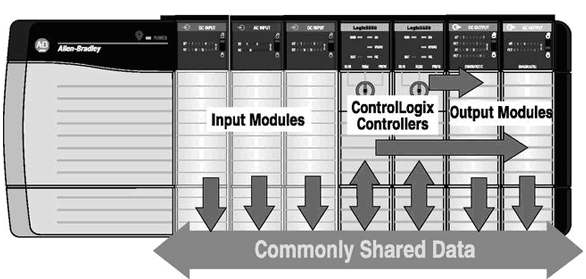
Рис. 11.5. ПЛК ControlLogix производства Rockwell Automation
Лекция №21
Технические средства приема, преобразования и передачи измерительной и командной информации по каналам связи, устройства связи с объектом управления, системы передачи данных, интерфейсы САиУ.
Функциональное назначение средств приема, преобразования и передачи информации по каналам связи в АСУ ТП состоит в приеме унифицированных сигналов от измерительных преобразователей, кодировании (шифровании) их для передачи по каналам связи и дешифрования в форму, удобную для обработки в управляющих устройствах.
Состав средств связи, преобразования и передачи информации по каналам связи зависит от топологии технологического объекта управления. В зависимости от того, является ли ТОУ территориально разнесенным или сосредоточенным, используются различные составы средств связи, преобразования и передачи информации по каналам связи.
Устройством связи с объектом в системах телемеханики и АСУТП обычно называют электронный блок, работающий автономно или в составе промышленного компьютера или контроллера, предназначенный для преобразования в цифровую форму первичных электрических сигналов от датчиков и преобразователей, непосредственно связанных с контролируемым объектом.
Примером простейшего блока УСО является блок для ввода дискретных сигналов, получаемых от переключателей, механически связанных с объектом. Более сложными являются блоки УСО для измерений аналоговых значений (токов и напряжений), которые поступают с нормирующих электрических преобразователей физических величин. Существуют специализированные блоки УСО, например, блок для оцифровки показаний термометра на основе термопары.
Блоки УСО обычно работают под управлением контроллера или компьютера и передают ему оцифрованные значения для дальнейшей обработки или передачи в систему сбора данных.
Блоки УСО обеспечивают также вывод управляющих воздействий на объект, например, УСО с набором контактных реле, по команде замыкающих цепи управления электродвигателем.
Модули или блоки УСО часто применяют в универсальных контроллерах, позволяющих обеспечить требуемое количество измерений за счет набора модулей УСО нужного типа и в нужном количестве.
Человекомашинный интерфейс
Под определение «человекомашинный интерфейс» (Human-Machine Interface) подпадают такие классы продуктов, как интерактивные операторские дисплеи, тонкие клиенты, панельные компьютеры, специализированные рабочие станции и др.
Одним из основных элементов ЧМИ явлются мнемосхемы.
Мнемосхема – интерактивная визуализация технологического процесса, позволяющая отслеживать состояние ТП и управлять им в реальном времени с монитора компьютера.


Рис. 1.4. Примеры мнемосхем используемых на производствах.

Рис. 1.5. Примеры мнемосхем разработанных студентами.
Средой разработки мнемосхем могут служить SCADA-системы.
SCADA-система (Supervisory Control And Data Acquisition) – система диспетчерского управления и сбора данных. Специальное программное обеспечение, решающее задачи ввода-вывода информации в системе АСУ ТП, отслеживание аварийных и предаварийных ситуаций, обработки и представление на пульт оператора графической информации о процессе, поддержки отчетов о выполнении технологического процесса.
SCADA-система это программный комплекс, позволяющий визуализировать технологический процесс и управлять им в реальном времени с монитора компьютера.
SCADA-системы применяются везде, где требуется оперативный контроль параметров, хода производства с возможностью немедленно реагировать на события технологического процесса либо автоматически в соответствие с заданным алгоритмом, либо вручную действиями оператора.
Примеры SCADA-систем:
Trace mode 6
T RACE
MODE®
- это интегрированная информационная
система для управления промышленным
производством в реальном времени,
объединяющая в едином целом продукты
для автоматизации технологических
процессов и бизнес-процессов.
RACE
MODE®
- это интегрированная информационная
система для управления промышленным
производством в реальном времени,
объединяющая в едином целом продукты
для автоматизации технологических
процессов и бизнес-процессов.
«КРУГ – 2000» - российская разработка для управления производством в едином информационном пространстве.

SIMATIC WinCC предназначен для решения обширного комплекса задач человеко-машинного интерфейса: от разработки проекта отдельно взятой панели оператора до разработки мощных систем человеко-машинного интерфейса с архитектурой клиент/сервер.

InTouch – мощный человеко-машинный интерфейс (HMI) для промышленной автоматизации, управления технологическими процессами и диспетчерского контроля. В России SCADA активно применяется для создания DCS (распределенных систем управления) и других АСУ.