

С учётом (14) выражение (13) приобретает вид
 .
(15)
.
(15)
Суммируя (7), (8), (10), (12) и (15), получаем
 .
(16)
.
(16)
Приравнивая
выражения (6) и (16), находим выражение для
искомой величены –
![]() ;
подставляя в найденное выражение все
числовые значения заданных величин,
получаем значение
;
подставляя в найденное выражение все
числовые значения заданных величин,
получаем значение
 .
.
 .
.
Задача д 5
Применение принципа Даламбера к определению реакций связей
Данная
задача на применение к изучению движения
системы принципа Даламбера. То есть,
если к каждой точке движущейся механической
системы приложить соответствующую силу
инерции, то действующие на систему силы
и силы инерции уравновесятся. При этом
в зависимости от характера движения
тела систему сил инерции можно заменить
или главным вектором сил инерции
![]() =
m
=
m
![]() ,
или главным моментом сил инерции
относительно оси вращения
,
или главным моментом сил инерции
относительно оси вращения
![]() =
JZ
=
JZ
![]() ,
или обоими инерционными факторами
вместе, где: m
-масса тела;
-ускорение
его центра масс;
,
или обоими инерционными факторами
вместе, где: m
-масса тела;
-ускорение
его центра масс;
![]() - момент инерции тела относительно оси
вращения Z;
- угловое ускорение тела.
- момент инерции тела относительно оси
вращения Z;
- угловое ускорение тела.
Необходимо отметить, что линия действия силы в общем случае не проходит через точку С ( см. пример Д5).
Пример
Определить реакции подпятника А и подшипника В вала, вращающего с постоянной угловой скоростью вокруг вертикальной оси У, если m 1-масса однородного стержня К N=2l, m2 - масса груза, закрепленного на конце невесомого стержня l , и углы, которые составляют стержни с осью вала. При этом АК=КЕ=ЕД=ДВ=а.
Решение
1.Изображаем ( с учетом заданных углов ) вал и прикрепленные к нему стержни в точках К и Е, а также груз закрепленный в точке М ( рис. Д5).
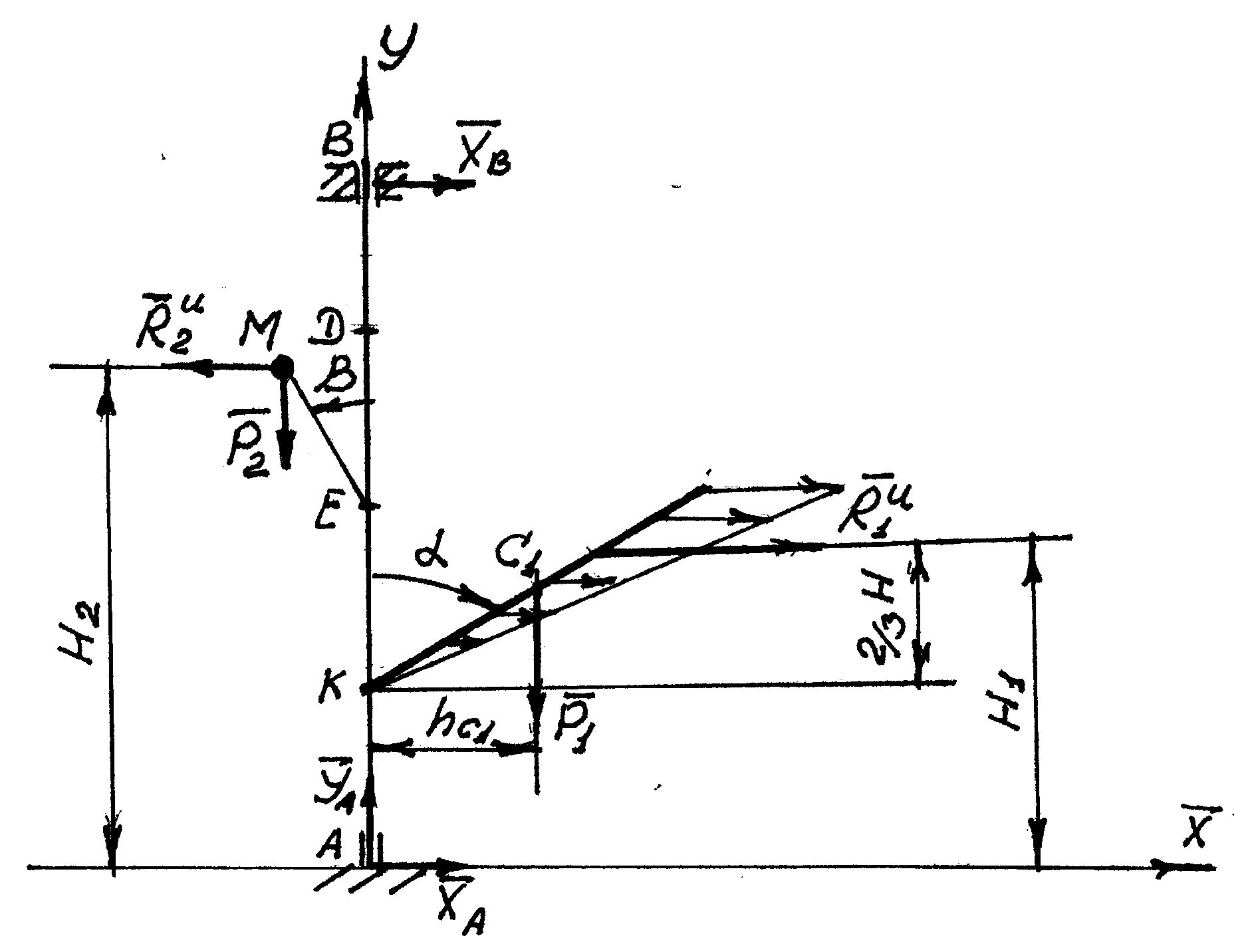
Рис. Д5
2.
Для определения искомых реакций
рассмотрим движение заданной механической
системы и применим принцип Даламбера.
Проведем вращающиеся вместе с валом
координатные оси АXУ
так, чтобы стержни лежали в плоскости
XУ
и изобразим действующие на систему
силы: активные силы - силы тяжести
![]() 1
= m1
1
= m1![]() ,
1=
m2
,
1=
m2
![]() и реакции связей - составляющие реакции
подпятника
и реакции связей - составляющие реакции
подпятника
![]() А,
А,![]() А
и реакцию цилиндрического подшипника
В
.
А
и реакцию цилиндрического подшипника
В
.
Согласно принципу Даламбера присоединим к этим силам силы инерции элементов однородного стержня и груза, считая его материальной точкой.
Так
как вал вращается с постоянной угловой
скоростью, то элементы стержня имеют
только нормальные ускорения
![]() nk,
направленные к оси вращения и численно
nk,
направленные к оси вращения и численно
![]() = 2hk,
где hk
- расстояния элементов от оси вращения.
Тогда силы инерции будут направлены от
оси вращения и численно
= 2hk,
где hk
- расстояния элементов от оси вращения.
Тогда силы инерции будут направлены от
оси вращения и численно
![]() = mk
= mk
![]() ,
где m
k
- масса элемента. Так как все
пропорциональны hk
,то эпюры параллельных сил инерции
стержня 1 образуют треугольник.
,
где m
k
- масса элемента. Так как все
пропорциональны hk
,то эпюры параллельных сил инерции
стержня 1 образуют треугольник.
Заменим
полученную для стержня систему
параллельных сил ее равнодействующей,
равной главному вектору этих сил, то
есть
![]() =
=![]() ,
здесь m1
- масса стержня 1,
,
здесь m1
- масса стержня 1,
![]() -
ускорение его центра масс.
-
ускорение его центра масс.
Сила
инерции груза, принимаемого за точечную
массу М, должна быть направлена в сторону,
противоположную ее ускорению и численно
будет равна
![]() =
=![]() .
Ускорения центров масс стержня 1 и груза
равны:
=
.
Ускорения центров масс стержня 1 и груза
равны:
=
![]() hc1,
hc1,![]() =
=![]() h2,
где
h2,
где
![]() - расстояния от центра масс стержня и
от груза до оси вращения и равны
hс1
=
- расстояния от центра масс стержня и
от груза до оси вращения и равны
hс1
=![]() sin
,
h2
=
sin
,
sin
,
h2
=
sin
,
Тогда
по модулю
=
m1![]() sin ,
= m2
sin
,
sin ,
= m2
sin
,
Линия
действия равнодействующей
![]() пройдет через центр тяжести соответствующей
эпюры сил инерции, то есть на расстояние
пройдет через центр тяжести соответствующей
эпюры сил инерции, то есть на расстояние
![]() H
от вершины треугольника К, где H
= 2
cos
.
H
от вершины треугольника К, где H
= 2
cos
.
Согласно принципу Даламбера приложенные внешние силы (активные реакции связей) и силы инерции образуют уравновешенную систему сил.
Все эти силы лежат в одной плоскости, поэтому можно составить три уравнения равновесия:
![]() кх
= 0; ХА
+ ХВ +
= 0;
кх
= 0; ХА
+ ХВ +
= 0;
kx = 0; УА Р1 Р2 = 0;
![]() А(
А(![]() k)
= 0; ХВ
4a
Р1hс1
+ Р2
h2
H1
+
H2
= 0,
k)
= 0; ХВ
4a
Р1hс1
+ Р2
h2
H1
+
H2
= 0,
где H1, H2 - плечи сил , относительно точки А, равные H1 = а+ H,
H2 = 2а + cos .
Полученная система трех уравнений равновесия включает в себя три неизвестные реакции XА, XВ ,YА, значения которых можно найти, подставив соответствующие величины (см. выше) и решив эту систему уравнений.