

4.5. Бесперебойное автоматическое управление (бау)
В современной распределенной системе управления, управляющей технологической установкой с одного пульта оператора, базовые и усовершенствованные контроллеры обрабатывают большой объем данных, связанных с процессом. При отказе одного из этих устройств и отсутствии средств резервирования вся установка может остановиться. Чтобы избежать такой ситуации, используется система Бесперебойного Автоматического Управления (БАУ).
4.5.1.Необходимость резервирования
Два основных блока на ИМ – это базовый и усовершенствованный контроллеры. Базовый контроллер может одновременно управлять 8 контурами, а усовершенствованная версия может работать с 16 контурами, программами последовательности, логическими блоками, а также аналоговыми и цифровыми данными. В случае отказа этих устройств по любой причине, для поддержания непрерывности процесса обязательно наличие резервного устройства, который примет на себя управление без прерывания техпроцесса.
С этой целью предусмотрено БЕСПЕРЕБОЙНОЕ АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ (БАУ) процессом при отказе контроллера на ИМ, запасной или РЕЗЕРВНЫЙ КОНТРОЛЛЕР (RC) вместе с БЛОКОМ УПРАВЛЕНИЯ РЕЗЕРВНЫМ КОНТРОЛЛЕРОМ (RCD), для принятия управления. Один резервный контроллер может с помощью своего блока управления следить за 8 контроллерами на магистрали. При отказе одного из них, блок управления резервным контроллером даст указание резервному контроллеру заменить неисправное устройство и выполнять его функции.
Операциям, выполняемым в каждом контроллере, подключенному к RC и RCD, необходимо назначить приоритет. Приоритеты можно настроить в RCD таким образом, чтобы при отказе одного блока контроллера резервный контроллер принимал на себя его функции. При отказе следующего контроллера, перед окончанием ремонта первого неисправного блока, RCD может определить, какой неисправный блок можно заменить резервным контроллером согласно назначенному приоритету. Таким образом обеспечивается постоянная работа даже при отказе более одного устройства.
Необходимо отметить, что при существующей надежности электронных узлов, печатных плат, интегральных схем и т.д., вероятность отказа второго устройства до окончания ремонта первого чрезвычайно мала.
Р ИС.
7.1 Бесперебойное
автоматическое управление (БАУ)
ИС.
7.1 Бесперебойное
автоматическое управление (БАУ)
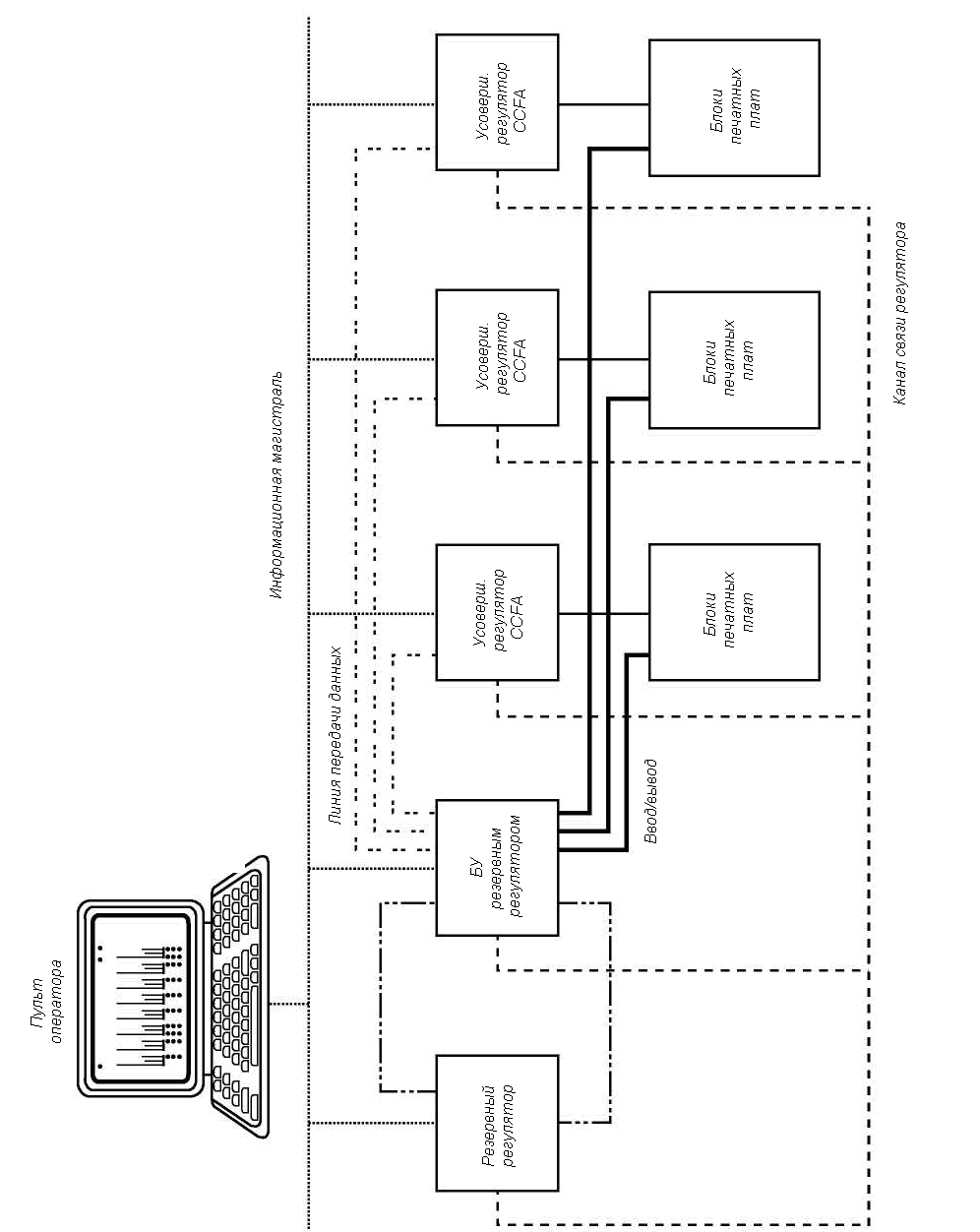
На РИС. 7.1 в схематичной форме показан общий план системы БАУ с тремя усовершенствованными контроллерами одним резервным контроллером и блоком управления (БУ) резервного контроллера. Этот же принцип аналогичен и для базовых контроллеров. Однако у базовых контроллеров резервируются только их 8 регулирующих контуров. У усовершенствованных контроллеров, кроме этого, резервируются и связанные с ними блоки плат PCFA.
Резервный контроллер и его БУ подключаются к ИМ через кабели 'A' и 'B', так же как основные контроллеры.
Если усовершенствованные контроллеры соединены между собой каналом связи для взаимного обмена информации или программами, такие же кабели необходимо подключить и к резервному контроллеру через специальную плату. При необходимости, приняв на себя функции неисправного блока, резервный контроллер будет иметь доступ через канал связи к другим контроллерам. Канал связи подключается и к RCD.
В общий блок плат (CCFA) каждого резервируемого контроллера устанавливается специальная плата БАУ, которая имеет проводное соединение с БУ резервного контроллера. Плата БАУ позволяет передавать данные из ОЗУ с батарейной памятью контроллера на ОЗУ RCD и на RC.
Блоки PCFA контроллеров имеют линии шины ввода-вывода, подключенные к RCD так, чтобы эти блоки были доступны для RCD и RC в случае необходимости резервирования.