

4.4.4.Метод конфигурирования
Чтобы провести конфигурирование (т.е. ввести данные для 4 конфигурационных слов), на экране пульта оператора необходимо вызывать соответствующий слот контроллера. Для этого в меню экрана выбирается Режим Конфигурирования (Configuration Mode), вводятся данные для выбора необходимого слота (т.е. номер ИМ, контроллера и номер слота), после чего появляется экран настройки.
Данные можно ввести с клавиатуры пульта, по 4 конфигурационных слова для каждого слота.
После завершения ввода данных для слота нажатие клавиши ENTER загружает данные в ОЗУ контроллера. В процессе настройки контроллер должен быть отключен.
4.4.5.Диагностика
Для правильного выполнения контроллером всех конфигурационных команд устройство имеет функцию встроенной диагностики. Каждые 15 секунд ЦП проводит диагностику контроллера, чтоб проверить способность устройства правильно выполнять все команды, содержащиеся в его ПЗУ. При неудачном прохождении диагностики устройство отключается.
Диагностика также проверяет возможности ЦП по исполнению команд, содержащихся в его ПЗУ. Конфигурационные слова, вводимые инженером КИПиА, сообщают контроллеру, какие команды необходимо использовать для каждого слота. После чего они загружаются в ОЗУ устройства.
4.4.6.Алгоритмы
Первые две цифры Конфигурационного слова №1 определяют алгоритм, используемый для настраиваемого слота. Многие алгоритмы понятны по своему названию; тем не менее, мы приведем описание 22 наиболее распространенных алгоритмов вместе с выходным уравнением. При этом используются следующие термины:
К=Коэффициент усиления
Т1=Время повторения (в минутах на повторение).
Т 2=Время дифференцирования (в минутах).
1/a=скорость дифференцирования = 8
s=оператор Лапласа
R=Коэффициент пропорциональности
В=Отклонение
X=вход X на слот (обычно LSP)
Yc=сконфигурированный вход Y на слот от RV.
DAS или DLA
Этот алгоритм применяется в случаях, когда слот используется в качестве Системы Сбора Данных (DAS) или Регистрации Данных с Аварийными Сигналами (DLA).
ПИД
Этот алгоритм используется для обычного ПИД-регулятора, где X = PV, Y= LSP и

ПИД ПРОПОРЦ.
В данном случае алгоритм представляет собой

где в режиме AUTO: Y = LSP, X = PV.
режиме CASC: Y = R(Yc) + B, X = PV.
В режиме CASC настроенный вход Y (Yc) имеет коэффициент пропорциональности и отклонение, подаваемые на вход.
ПИД АВТО ПРОПОРЦ.
Здесь регулирующее уравнение имеет следующий вид:

где в режиме AUTO: Y = LSP, X = PV.
в режиме CASC: Y = R(Yc) + B, X = PV.
На сконфигурированный вход Y (Yс) подается заданное оператором смещение. В любом режиме, за исключением CASC, коэффициент пропорциональности рассчитывается автоматически при заданном смещении. В режиме CASC оператор может изменять коэффициент пропорциональности.
ПИД АВТО ОТКЛОНЕНИЕ
Данное регулирующее уравнение имеет форму:

где в режиме AUTO: Y = LSP, X = PV.
в режиме CASC: Y = R(Yc) + B, X = PV.
На Yc подается коэффициент пропорциональности и смещение. В любом режиме, за исключением CASC, коэффициент смещения рассчитывается автоматически при поддержании заданного коэффициента пропорциональности. В режиме CASC, оператор может изменять смещение.
ПИД ПЦУ
Алгоритм представлен следующей формулой:

где в режиме AUTO: Y = LSP, X = PV.
в режиме CASC: Y = Yc(RV), X = PV
в режиме PROG: OUTt (5) = настройка ПЦУ.
Это позволяет компьютеру на ИМ блокировать слот и задать выходной сигнал (S), тем самым обеспечивая ПЦУ.
ПИД МДУ
Регулирующее уравнение:

где в режиме AUTO: Y = LSP, X = PV.
в режиме CASC: Y = Yc
в режиме PROG: Y = CSC
Это позволяет компьютеру на ИМ вводить SP на вход Y этого слота, тем самым обеспечивая МДУ.
ПИД КВАДР. ОШИБКА ПРИ УСИЛЕНИИ
Алгоритм в этом случае является следующим:

![]()
где
и в режиме AUTO: Y = LSP
в режиме CASC: Y = Yc
Нормальное ПИД действие происходит в режиме AUTO.
В режиме CASC коэффициент усиления К умножается на индекс нормировки от 1 до 0, рассчитываемый как абсолютное значение ошибки (X- Y в процентах), деленное на 100.
ПИД КВАДР. ОШИБКА ИНТЕГИРОВАНИЯ
Здесь уравнение следующее:

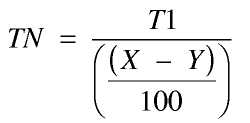
где
и в режиме AUTO: Y = LSP в
режиме CASC: Y = Yc
нормальный ПИД-выход в режиме AUTO.
Режим CASC использует вход Yc в качестве уставки, а значение используемой константы время сброса рассчитывается от T1, деленного на индекс нормировки от 0 до 1. Данный индекс рассчитывается как абсолютное значение ошибки (X- Y в процентах), деленное на 100.
ПИД ПАУЗА
В этом случае алгоритм следующий:

и OUT (S) = 0 для низкого отклонения PV от SP,
когда (X-Y)< DEVLO
и OUT OS) = ПИД регулирующее действие для (X-Y)> DEVHI где DEVHI = высокое отклонение PV от SP.
DEVLO = низкое отклонение PV от SP.
ОПЕРЕЖЕНИЕ И ЗАПАЗДЫВАНИЕ
На выходе контроллера имеем следующее:

T2 = Константа времени ОПЕРЕЖЕНИЯ,
и отношение T2/T1 ограничено 16.
ВЫБОР СИГНАЛА С НАИВЫСШИМ ЗНАЧЕНИЕМ
Здесь контроллер обеспечивает следующее:
OUT (S) = Входной сигнал с наивысшим значением
Данный алгоритм можно сконфигурировать для 8 входных сигналов, из которых на выход проходит сигнал с наивысшим значением. Несконфигурированные входы игнорируются.
ВЫБОР СИГНАЛА С НАИНИЗШИМ ЗНАЧЕНИЕМ
Здесь контроллер обеспечивает следующее:
OUT (S)= Входной сигнал с самым низким значением
Данный алгоритм можно сконфигурировать для 8 входных сигналов, из которых на выход проходит сигнал с самым низким значением. Несконфигурированные входы игнорируются.
ПЕРЕКЛЮЧЕНИЕ
Здесь выход контроллера определяется следующим образом:
OUT (S) = X в режиме AUTO или OUT (S) = Y в режиме CASC
Выходной сигнал совпадает с одним из входов (X или Y) в зависимости от выбранного режима.
СУММИРОВАНИЕ
В данном случае имеем регулирующее уравнение:
OUT (S) = K1(X) + KA(Y) = K2
где K1 = X коэффициент масштабирования
KA = Y коэффициент масштабирования
K = смещение
Выходной сигнал прямо пропорционален сумме двух входных сигналов X и Y с учетом смещения.
УМНОЖЕНИЕ
Регулируемый выходной сигнал представлен в форме:

K2 = смещение
Выходной сигнал прямо пропорционален произведению двух входных сигналов X и Y с учетом смещения.
ДЕЛЕНИЕ
В этом случае на выходе контроллера получается следующее:

K2 = смещение
Выходной сигнал прямо пропорционален частному двух входных сигналов X и Y с учетом смещения.
КВАДРАТНЫЙ КОРЕНЬ
Данное уравнение имеет форму:
![]()
K2 = смещение
Выходной сигнал равен квадратному корню суммы входных сигналов X и Y, с учетом смещения.
ДВОЙНОЙ КВАДРАТНЫЙ КОРЕНЬ
В этом случае выходной сигнал:
![]()
где KA = коэффициент масштабирования
K2 = смещение
Выходной сигнал равен квадратному корню произведения входов X и Y, с учетом смещения.
СУММА КВАДРАТНЫХ КОРНЕЙ
Выходной сигнал контроллера:
![]()
где KA = коэффициент масштабирования Y
K1 = коэффициент масштабирования X
K2 = смещение
Выходной сигнал равен сумме квадратных корней входных сигналов X и Y с учетом смещения.
ВЫБОР БОЛЬШЕГО ЗНАЧЕНИЯ
В этом случае:
OUT (S) = X, если X > Y
или OUT (S) = Y, если Y > X
ВЫБОР МЕНЬШЕГО ЗНАЧЕНИЯ
В этом случае:
OUT (S) = X, если X < Y
или OUT (S) = Y, если Y < X