

4.2.Передача данных
В распределенной системе управления образующие ее блоки распределены по территории предприятия. Все эти блоки обмениваются данными между собой, а также с внешними ЭВМ или пультом оператора. Многие РСУ используют систему Информационной Магистрали (Data Highway), в которых данные передаются по коаксиальным кабелям.
4.2.1.Информационная магистраль
Все блоки РСУ соединены вместе каналом передачи данных. Обычно для этого используется коаксиальный кабель, подключенный к каждому блоку, по которому происходит прием и отсылка данных. Некоторые производители называют такой коаксиальный кабель Информационной Магистралью (Data Highway).
ИМ прокладывается в парах (т.е. двойной кабель: один - активный, второй -резервный), чтобы обеспечить резервирование и целостность данных. При повреждении активного кабеля производится немедленное переключение на резервный. Для обеспечения целостности передаваемых данных два кабеля прокладываются по различным маршрутам.
Обычно данные ИМ состоят из 31-битных информационных сообщений, передающиеся по кабелю с частотой 250 кГц.
4.2.2. Формат данных
31-битные данные состоят из одиночных или множественных слов, передающихся как асинхронные последовательные данные со скоростью 250 кб/с (250 тысяч бит/сек). Если битовый интервал составляет 4 мкс (4 микросекунды), интервал одиночного слова равен 124 мкс. Между словами оставляется промежуток около 5-6 бит. На РИС. 3.1 показан формат информационного слова.
КОМАНДНЫЕ СЛОВА

ИНФОРМАЦИОННЫЕ СЛОВА
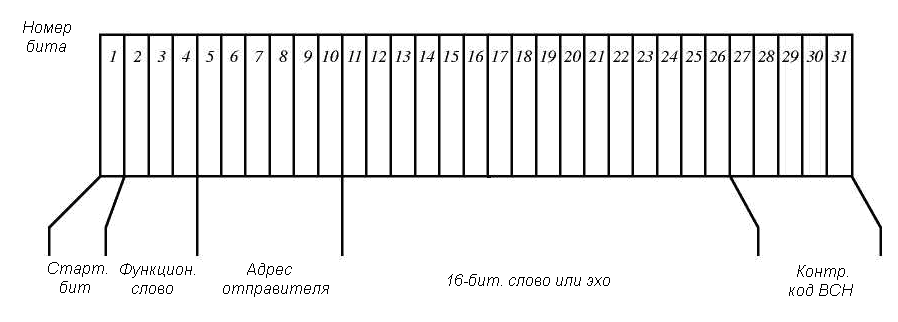
РИС. 3.1
БИТ 1 всегда используется в качестве асинхронного 'стартового’ бита и отсылается источником данных в начале передачи. БИТЫ 27-31 всегда содержат в себе 5-разрядный двоичный шестнадцатеричный (BCH) контрольный код (будет объяснен позже).
БИТЫ 2-4 образуют командное слово для приемника данных, например:
БИТЫ 2 3 4 КОМАНДА
1 1 1 = ЧТЕНИЕ с принимающего модуля
0 1 1 = ЗАПИСЬ в принимающий модуль
1 1 0 = ОПРОС модулей, хотят ли они
использовать ИМ.
1 0 0 = РАЗРЕШЕНИЕ для устройства на
использование ИМ.
1 0 1 = БЛОК данных в принимающий блок
0 0 1 = СЛОВО данных в принимающий блок
0 0 0 = ЗАНЯТ, модуль занят другой задачей
Слова могут быть двух видов: командные или информационные.
4.2.3. Командные слова
В формате командного слова биты 5-10 содержат ИМ-адрес модуля, который генерирует слово, эти шесть бит вводятся передающим модулем.
Биты 11-16 содержат ИМ-адрес принимающего модуля (т.е. адрес назначения), для которого предназначено сообщение. Биты 17-26 содержат адрес базы данных в принимающем модуле. Например, если принимающий модуль является контроллером, согласно своей настройке, он может иметь 8 слотов управления, и блоку необходимо знать, какому слоту адресуется сообщение. Данная информация представлена в битах 17-26.
Команда «Чтение»
Эта команда используется для доступа к информации базы данных модуля ИМ, которому дается указание подключиться к указанной ячейке памяти и передать полученную информацию на адрес Источника Команды. Пример: оператор запрашивает отображение состояния технологической переменной на дисплее пульта. Пульт оператора посылает команду «чтение» на контроллер (или блок обработки) с указанием считать статус информационной точки (т.е. технологической переменной) из памяти и передать ее на станцию оператора.
Команда «Запись»
Данная команда служит для записи данных в базу данных принимающего модуля. Она предупреждает принимающий блок о том, что за ней следует слово (или блок) данных. Пример: оператор проводит изменение уставки на пульте оператора, который в свою очередь посылает команду «запись» на контроллер, сообщая ему, что за ней следует слово (или блок) данных, которое необходимо записать в определенную ячейку памяти (определяется битами 17-26 в сообщении).