

4.1.3. Другие элементы
Данные, принимаемые и отсылаемые конечными элементами, в современной РСУ представлены в форме электрического сигнала. Единственным пневматическим конечным элементом является регулирующий клапан; пневматический привод на регулирующем клапане обеспечивает простоту обслуживания, низкие расходы и малые размеры. В данном случае электрический сигнал посылается на регулирующий клапан, где IP преобразователь изменяет его на пневматический сигнал.
Все электрические информационные сигналы необходимо группировать на панелях между полевыми элементами и контроллерами или блоками обработки.
Для плавного регулирования требуются контроллеры.
Для обработки данных требуются блоки обработки, которые могут принимать как аналоговые, так и цифровые сигналы.
Оператору необходим пульт, чтобы он мог изменять уставки регуляторов и их режимы управления (автоматический, ручной, каскадный, программный, компьютерный и т.д.), а также просматривать данные, поступающие с установки.
На РИС. 2.1 показаны эти элементы.
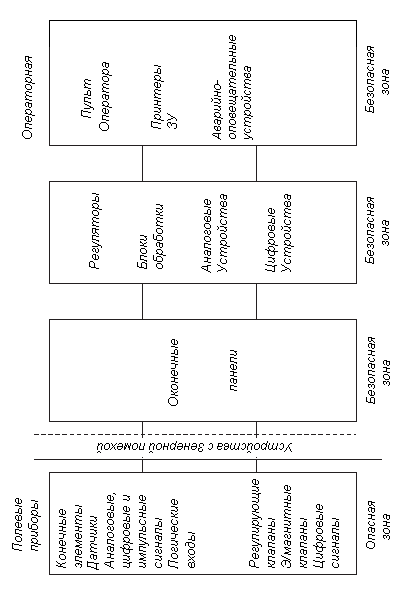
РИС.2.1. Организация распределенного управления
4.1.4. Распределенное управление
На РИС. 2.2 показаны блоки обработки, контроллеры и пульт оператора как электронные блоки, распределенные по техпроцессу.


РИС. 2.2 Распределенное управление
Располагая электронные схемы вокруг микропроцессора, можно создать контроллер, работающий с несколькими контурами управления (обычно от 8 до 10). После того, как память, связанная с микропроцессором сконфигурирована на отдельные контуры управления, связанные с данным контроллером, устройство обслуживает свои контуры, используя последние полученные инструкции.
Эти фактором явилось появление малого компьютера. Компьютер или микропроцессорная система, смонтированные на печатной плате, позволили создать конфигурируемые электронные устройства: контроллеры и блоки обработки. Небольшой размер этих устройств позволил устанавливать их рядом с конечными элементами, сокращая путь прохождения сигнала в пределах опасных зон.
Передача инструкций от оператора на контроллер (например, изменение уставки, режима управления и т.д.) происходит через пульт оператора и проходит по так называемой информационной магистрали (канал связи).
Передача данных по информационной магистрали (ИМ) между пультом оператора и контроллером происходит по одиночному коаксиальному кабелю. Электронные схемы на пульте оператора и контроллере позволяют двум устройствам «общаться» друг с другом.
Конечно, вызывает обеспокоенность возможность обрыва информационной магистрали и, как результат, потери связи. Поэтому для ИМ обычно прокладывают два коаксиальных кабеля: активный, через который проходит связь, и пассивный, через который соединенные устройства прослушивают друг друга. При возникновении проблемы на активном кабеле, производится автоматическое переключение на пассивный. Оператор получает аварийный сигнал о возникшей неисправности, в то время как связь осуществляется через второй кабель.
На ИМ можно подключить и другие устройства – дополнительные контроллеры, блоки обработки и т.д. – при условии, что канал связи не перегружен. На каждом устройстве имеется печатная плата, которая принимает и посылает сигналы связи. Коаксиальный кабель ИМ можно подключить к такой плате через тройниковые соединения, как показано на РИС. 2.
Соединения представляют собой потенциальную проблему для ИМ, поэтому необходимо обеспечить управление таким образом, чтобы ИМ одновременно использовало только одно устройство. Поэтому информационную магистраль необходимо оснастить контроллером связи, который будет как регулировать процесс передачи данных, так и проверять целостность данных. Мы рассмотрим информационную магистраль более подробно на следующем занятии.
ПРЕИМУЩЕСТВА РСУ
Контроллеры и блоки обработки расположены на территории установки настолько близко к своим конечным элементам, насколько позволяют границы опасных зон, пути прохождения сигнала короткие, целостность данных сохраняется.
Данные от регуляторов и блоков обработки передаются через два коаксиальных кабеля. Таким образом, в операторную необходимо проводить только два кабеля вместо прежней системы, для которой требовалась передача всех технологических переменных и выходных сигналов.
Простота установки дополнительного оборудования. Дополнительные контроллеры, блоки обработки или другие устройства можно подключить к ИМ в любое время, с определенными ограничениями.
Легкость пуско-наладки. Небольшие блоки оборудования можно запускать в эксплуатацию по отдельности, подключая их к ИМ и пульту оператора до окончания сборки всей установки.
Преимущества дает и централизованное управление с наблюдением и контролем всех параметров установки с единого пульта оператора.
НЕДОСТАТКИ РСУ
Стоимость установки РСУ может быть необоснованно высокой для небольших производственных установок.
Программные требования конфигурации системы должны быть индивидуально настроены под установку. Для конфигурации может потребоваться большое количество человеко-часов.
Введение централизованного управления РСУ в ситуации, когда знания оператора ограничены только работой простого контура управления, может потребовать переобучение операторов и обслуживающего персонала.
На РИС. 2.3 показана общая схема распределенной системы управления.
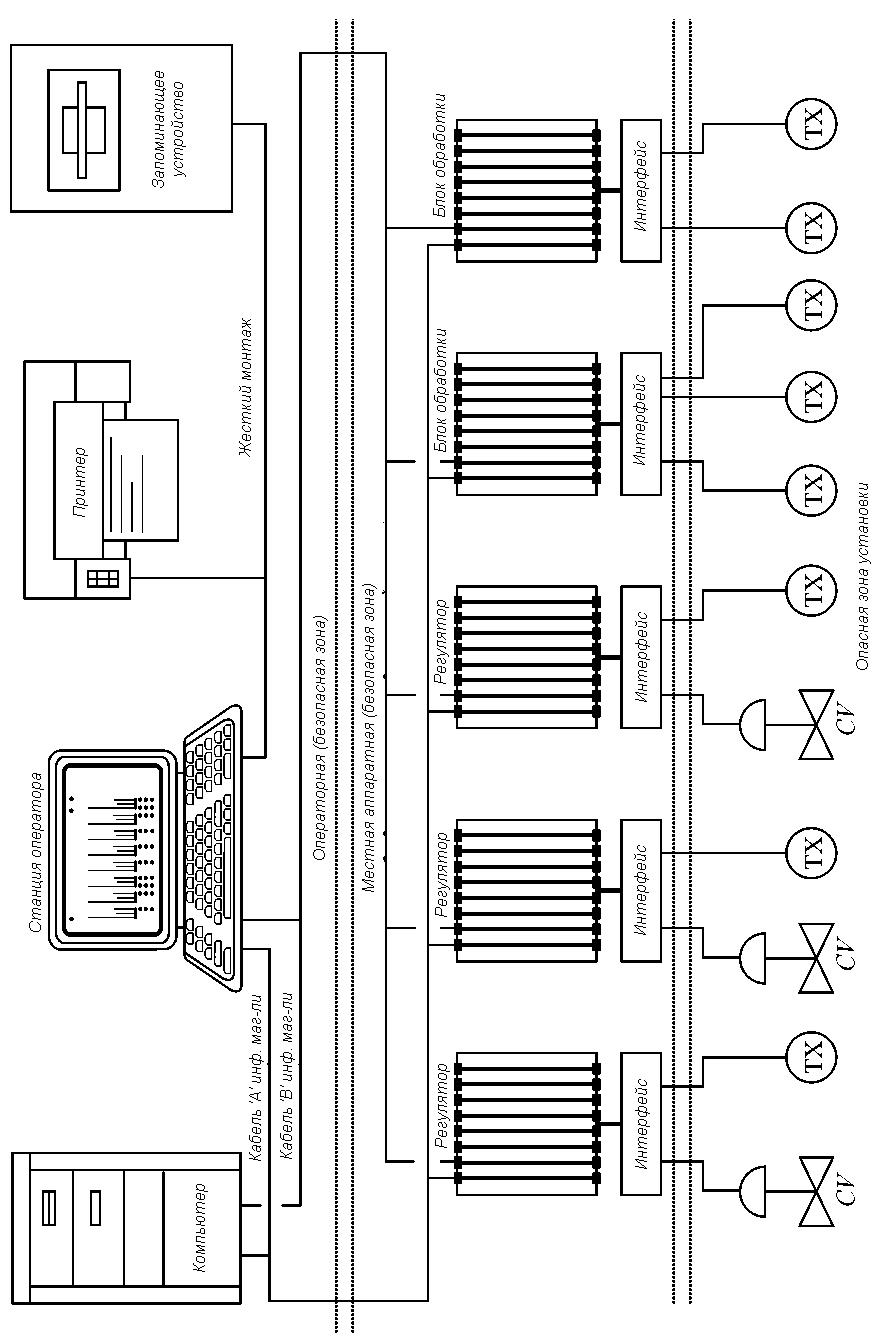
РИС. 2.3 Схема расположения оборудования РСУ
В центре управления (операторной), расположенной в безопасной зоне предприятия, находится пульт (или станция) оператора с устройством визуальной индикации (дисплеем) и клавиатурой. Оператор может:
наблюдать техпроцессы установки
получать информацию о технологических переменных, определяя их по индивидуальному обозначению
получать информацию о выходных сигналах на техпроцесс, определяя их по индивидуальному обозначению
обращаться к точкам через контроллеры для настройки уставок, режимов управления, выходов и т.д.
получать статистическую информацию с носителей данных и просматривать ее на дисплее в различных формах, при необходимости выводить на принтер
связываться по сети с внешним компьютером для проведения статистического анализа или генерирования отчетов о производстве.
Станция управления (станция оператора), как правило, оборудована запоминающим устройством (жесткий диск, дискеты, стример и т.д.) и принтерами для вывода информации на бумажный носитель.
Станция управления и внешняя ЭВМ показаны соединенными между собой двумя коаксиальными кабелями, активным и пассивным резервным (обозначены как кабель 'A' и кабель 'B'). Кабели ИМ идут от операторной в разных направлениях до шкафов электронного оборудования, расположенных на территории предприятия, для поддержания целостности системы в случае обрыва кабеля.
Шкафы электронного оборудования содержат в себе печатные платы, из которых составлены блоки:
контроллеров: каждый с возможностью управления от 8 до 10 контурами. Каждому контуру управления предоставляется своя область памяти в памяти контроллера, но все они обслуживаются одним микропроцессором на одной из печатных плат
обработки: содержат печатные платы, которые служат для обработки аналоговых или цифровых данных.
Шкафы электронного оборудования (контроллеры или блоки обработки) не являются искробезопасными. Поэтому их следует размещать в безопасной зоне предприятия, но как можно ближе к их конечным элементам. На нефтеперерабатывающем заводе, химическом комплексе или морской платформе, где существуют опасные зоны, для установки таких шкафов сооружаются специальные укрытия, которые защищают оборудование от воздействия вредных газов, или немедленно отключают подачу электроэнергии в случае газового выброса.
Конечные элементы (датчики и регулирующие клапаны) располагаются непосредственно в области техпроцесса, в опасной зоне, если такая существует.
Все кабели от конечных элементов приходят в безопасную зону. Здесь они заводятся через барьеры Зенера на оконечные панели, расположенные рядом с контроллерами или блоками обработки.
Введение данных в контроллеры или блоки обработки от оконечных панелей производится с помощью многожильного кабеля, обычно 50-ти жильного, с использованием стандартных разъемов.