

1.2.4. Порты
Порты ввода/вывода играют роль посредника между микроЭВМ и внешними устройствами. Как и ячейки памяти, порты имеют адрес, что позволяет иметь множество портов в составе одной микроЭВМ. Роль портов могут выполнять микросхемы буферных регистров, микросхема программируемого параллельного интерфейса (ППИ) и др. О них вы подробно узнаете далее.
1.3. Формирование сигналов на системной магистрали
1.3.1. Основные управляющие сигналы
Адресация - только часть процесса управления памятью и внешним устройством (ВУ). Кроме адресов требуются стробы чтения и записи (RD и WR), задающие направление обмена, сигналы разрешения работы CS.
В системном интерфейсе используется система из четырех сигналов: сигнала чтения из памяти MEMR , записи в память MEMW , чтения из ВУ IOr и записи во ВУ IOW.
Все эти сигналы имеют активный низкий уровень и представляют собой отрицательный импульс (рис. 3.1).

1.3.2. Чтение данных из памяти
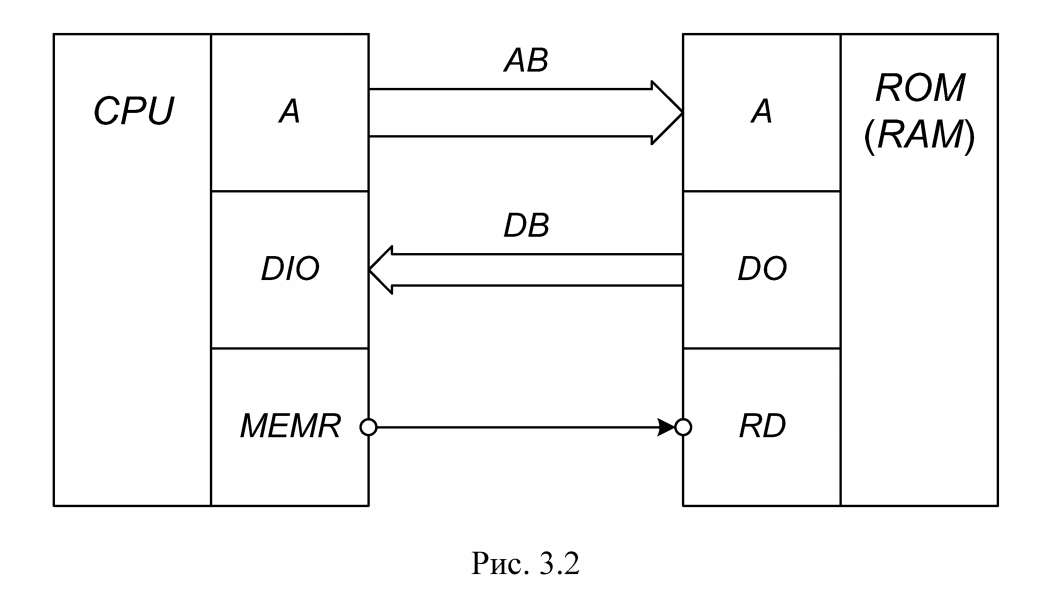
Упрощенная схема чтения данных из памяти микропроцессором показана на рис. 3.2. На рис. 3.3 показаны временные диаграммы чтения данных из памяти МП.
Поскольку каждая шина состоит из множества проводников, то в тех случаях, когда конкретное состояние каждого проводника не имеет значения, для всей шины рисуют одну временную диаграмму. Две параллельные линии означают при этом, что некоторые проводники передают сигнал высокого уровня, а некоторые - низкого. Если состояние шины стабильно, то линии идут параллельно друг другу. Изменение состояния шины показывается скрещивающимися линиями (например, событие 1).
Поясним, что же происходит в каждой из точек на временной диаграмме чтения данных из памяти (рис. 3.3).
Событие 1 - микропроцессор выставляет на AB адрес нужной ячейки.
Событие 2 - с некоторым запаздыванием вырабатывается отрицательный импульс чтения из памяти.
Событие 3 - память дешифрирует адрес ячейки и выставляет ее содержимое на DB.
Событие 4 - импульс чтения заканчивается (возвращается в пассивное состояние). Длительность импульса должна быть достаточной, чтобы память успела выставить на DB содержимое адресованной ячейки, а микропроцессор их считать.
События 5, 6 - состояние шин D и A может вновь изменится.

1.3.3. Запись данных в память
Упрощенная схема записи данных в память микропроцессором показана на рис. 3.4. На рис. 3.5 показаны временные диаграммы записи данных в память МП.
Последовательность сигналов при записи в память (рис. 3.5) немного иная, в отличие от режима чтения:
События 1, 2 - МП выставляет на AB адрес нужной ячейки, одновременно (или с некоторой задержкой) МП выставляет на DB данные подлежащие записи.

Событие 3 - МП вырабатывает отрицательный импульс записи. Событие 4 - через задержку, достаточную для надежной записи в память, импульс записи в память прекращается.
События 5, 6 - состояние шин D и A может вновь изменится.
1.3.4. Чтение данных из порта ввода
Упрощенная схема чтения данных из внешнего устройства микропроцессором через порт ввода показана на рис. 3.6.

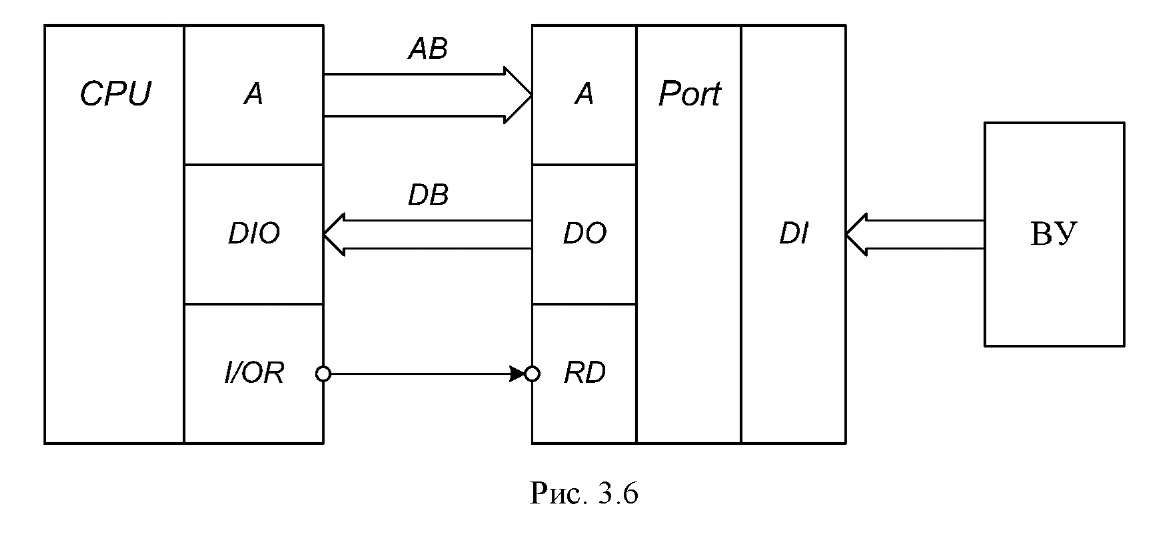
Временные диаграммы чтения данных из порта ввода (рис. 3.7) те же, что и для чтения данных из памяти рис. 3.3), с той лишь разницей, что управляющий сигнал чтения из порта обозначается как IOR. По этой причине разъяснение событий не приводится.