

3.2.3. Тензометрические датчики
Тензодатчики применяются для измерения величины силы (давления).
Различают резистивные, полупроводниковые и пьезоэлектрические тензометрические датчики. Измерение силы тензодатчиком происходит косвенно - путем измерения деформации калиброванного элемента, вызванной действием данной силы. Для измерения давления его преобразуют в силу и измеряют тензометрическим методом. Тензодатчики также применяют для измерения скоростей потока различных жидкостей и сред (воздуха, газов). Такие измерения производят, используя дифференциальный метод измерения.
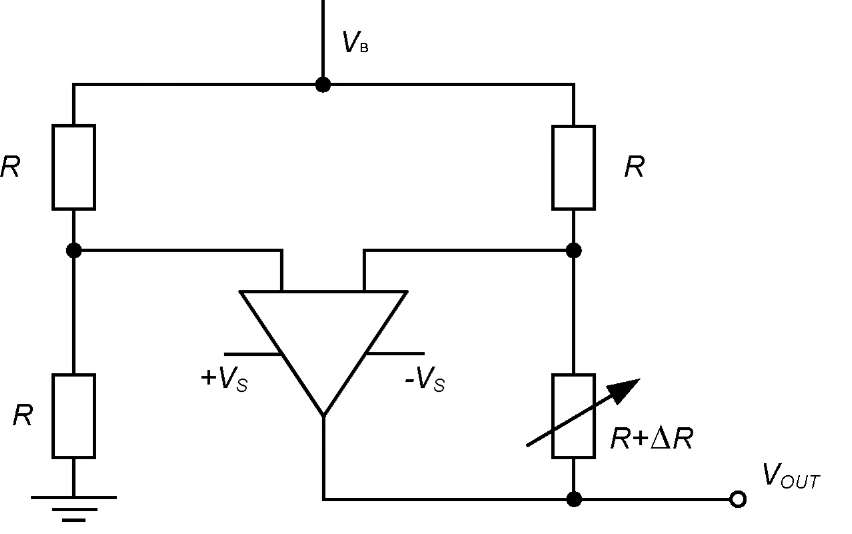

Рис. 2.7. Линеаризация четвертьмостового датчика
В табл. 2.3 приведены направления и техника применения тензодатчиков.
Таблица 2.3 |
|
|
Применение тензодатчиков |
Направление |
Тензодатчик |
Деформация |
Тензодатчик, пьезоэлектрический преобразователь |
Сила |
Элемент нагрузки (динамометр) |
Давление |
Диафрагма преобразует в силу, измеряемую тензодатчиком |
Поток |
Методы измерения дифференциального давления |
Резистивный тензодатчик меняет свои размеры при действии на него силы (сжимается или растягивается), таким образом он изменяет свое сопротивление.
В простейшем случае резистивный тезодатчик представляет собой тен- зопроволочку, натянутую между двумя стойками-контактами (рис. 2.8). Сила, воздействуя на проволочку (площадью сечения А, длиной L, удельным сопротивлением р), вызовет удлинение или сжатие последней, что приведет к пропорциональному увеличению или уменьшению ее сопротивления:

где GF - это тензочувствительность (значение 2.0-4.5 - для металлов, более 150 - для полупроводников).
Значение силы, приложенной к проволочке, определяется величиной AL/L, выражается в единицах относительной деформации (е. о. д.). Таким образом, чем больше тензочувствительность, тем больше величина изменения сопротивления и, следовательно, выше чувствительность датчика.
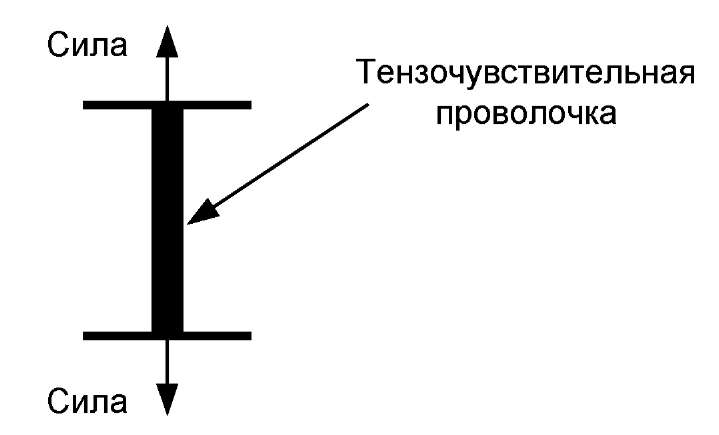
Рис. 2.8. Проволочный тензодатчик
Сравнение металлических и полупроводниковых тензодатчиков
Если проволочку или проводящую тензофольгу закрепить на специальной подвижной пластине или основании, мы получим наклеиваемый тензо- датчик. Такой датчик устанавливается вдоль направления измеряемой силы (рис. 2.9).
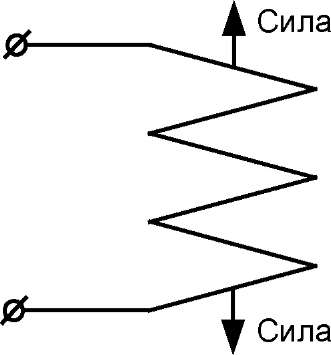
Рис. 2.9. Наклеиваемый проволочный тензодатчик
Наклеиваемые датчики изготовляют из тех же металлов, что и проволочные (константан, нихром, сплав никеля с железом и т. д.). Наибольшее распространение получили фольговые датчики, изготавливаемые методом фототравления.
Таблица 2.4
Параметр |
Металлический тензодатчик |
Полупроводниковый тензодатчик |
Диапазон измерения |
0.1-40,000 |8 |
0.001-3000 |8 |
Тензочувствительность |
2.0-4.5 |
50-200 |
Сопротивление, Ом |
120, 350, 600, ..., 5000 |
1000-5000 |
Допуск резисторов |
0. 1 %-0.2 % |
1-2 % |
Размер, мм |
0.4-150 (стандарт 3-6) |
1-5 |
Проволочные датчики имеют малую поверхность связи с образцом (основанием), что уменьшает токи утечки при высоких температурах и дает большее напряжение изоляции между чувствительным элементом и образцом. Кроме того, фольговые чувствительные элементы имеют большое отношение площади поверхности к площади поперечного сечения (чувствительность) и более стабильны при критических температурах и длительных нагрузках. Большая площадь поверхности и малое поперечное сечение также обеспечивают хороший температурный контакт чувствительного элемента с образцом, что уменьшает саморазогрев датчика.
Полупроводниковые материалы (например, кремний и германий), имеющие пьезорезистивный эффект, используют для изготовления тензодат- чиков большой чувствительности. Однако они трудно поддаются компенсации и имеют нелинейное изменение сопротивления (табл. 2.4).