

1.8.4.1. Микросхемы статических озу
Схемы, в которых в качестве запоминающей ячейки используется триггер, называются статическими ОЗУ, информация в микросхеме сохраняется все время, пока к ней подключено питание.
В микросхемах ОЗУ присутствуют две операции: операция записи и операция чтения. Для записи и чтения информации можно использовать различные шины данных, но чаще используется одна и та же шина данных. Это позволяет экономить выводы микросхем, подключаемых к этой шине, и легко осуществлять коммутацию сигналов между различными устройствами. Микросхемы статической ОЗУ могут быть с одноразрядной и многоразрядной организацией, пример микросхемы с многоразрядной организацией приведен на рис. 8.8.
Работа микросхемы осуществляется в соответствии с таблицей истинности табл. 8.1). Функционирование микросхемы во времени показано на временной диаграмме записи (рис. 8.9).
Таблица 8.1
ш |
WR/RD |
A |
DI |
DO |
Режим работы |
1 |
X |
X |
X |
Z |
Хранение |
0 |
0 |
A |
DI |
X |
Запись |
0 |
1 |
A |
X |
DO |
Считывание |

Рассмотрим работу микросхемы в режиме записи. Сначала на адресные входы подается адресный код ячейки (1), затем на входах данных устанавливаются значения записываемых данных (2). На стробирующем входе WR /RD устанавливается низкий уровень, соответствующий режиму записи (3). Сигнал выбора микросхемы переходит в активное состояние (4). Через период времени, достаточный для записи данных, сигнал выбора микросхемы и стробирующий вход переходят в пассивное состояние (5, 6), и состояние шин адреса и данных может измениться (7, 8).
Статические ОЗУ отличаются высоким быстродействием, но при этом имеют относительно невысокую емкость. Их применяют для построения микроконтроллерных схем.
1.8.4.2. Микросхемы динамических озу
Микросхемы памяти, в которых основой запоминающего элемента памяти служит конденсатор небольшой емкости, называются динамическими ОЗУ. Данные хранятся в виде зарядов емкостей МОП-структур. Такой элемент памяти намного меньше триггерного, используемого в статических ОЗУ, что обусловливает высокую интеграцию динамических ОЗУ.
Ядро (прямоугольную матрицу) микросхемы динамической памяти состоит из множества ячеек, каждая из которых хранит всего один бит информации. На физическом уровне ячейки объединяются в прямоугольную матрицу, горизонтальные линейки которой называются строками (ROW), а вертикальные - столбцами (Column) или страницами (Page).
Л инейки
представляют собой обыкновенные
проводники, на пересечении которых
находится элемент памяти - несложное
устройство, состоящее из одного
транзистора и одного конденсатора (рис.
8.10).
инейки
представляют собой обыкновенные
проводники, на пересечении которых
находится элемент памяти - несложное
устройство, состоящее из одного
транзистора и одного конденсатора (рис.
8.10).
Конденсатору отводится роль непосредственного хранителя информации. Отсутствие заряда на обкладках соответствует логическому нулю, а его наличие - логической единице. Транзистор же играет роль «ключа», удерживающего конденсатор от разряда. В спокойном состоянии транзистор закрыт, но стоит подать на соответствующую строку матрицы электрический сигнал, как через некоторое время (конкретное время зависит от конструктивных особенностей и качества изготовления микросхемы) он откроется, соединяя обкладку конденсатора с соответствующим ей столбцом.
Чтение ячейки деструктивно по своей природе, поскольку конденсатор в процессе считывания его заряда разряжается. Во избежание потери информации считанную строку приходится тут же перезаписывать вновь (построчная регенерация). В зависимости от конструктивных особенностей эту операцию выполняет либо контроллер памяти, либо сама микросхема памяти. Практически все современные микросхемы принадлежат к последней категории. Помимо этого именно операция чтения определяет быстродействие динамического ОЗУ.
Ввиду микроскопических размеров ячейки ОЗУ, а следовательно и емкости конденсатора, записанная на нем информация хранится крайне недолго - буквально сотые, а то и тысячные доли секунды. Причина тому - саморазряд конденсатора из-за наличия токов утечки. Для борьбы с потерей информации прибегают к регенерации памяти - периодическому считыванию ячеек с последующей перезаписью. При считывании информация не выставляется на шину данных, весь процесс проходит внутри микросхемы.
М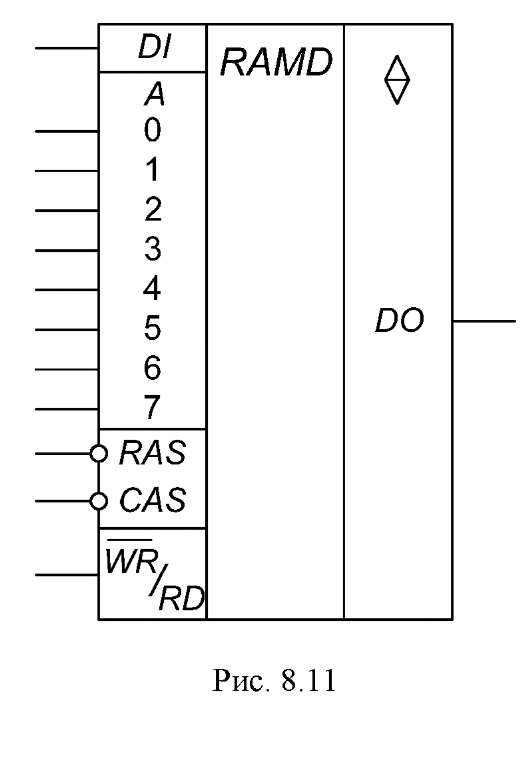 икросхемы
динамической памяти одноразрядные.
Пример конкретной микросхемы приведен
на рис.
8.11.
Как уже отмечалось выше, количество
ячеек в этих микросхемах значительно
больше, чем в других микросхемах
памяти.
Эта особенность всех микросхем памяти
объясняется мультиплексированием шины
адреса. Адрес делится на два подадре-
са, один из которых адрес строки, а другой
- адрес столбца матрицы запоминающих
элементов. Адреса подаются поочередно
на одни и те же выводы микросхемы. Подача
адреса сопровождается стробирующими
сигналами:
икросхемы
динамической памяти одноразрядные.
Пример конкретной микросхемы приведен
на рис.
8.11.
Как уже отмечалось выше, количество
ячеек в этих микросхемах значительно
больше, чем в других микросхемах
памяти.
Эта особенность всех микросхем памяти
объясняется мультиплексированием шины
адреса. Адрес делится на два подадре-
са, один из которых адрес строки, а другой
- адрес столбца матрицы запоминающих
элементов. Адреса подаются поочередно
на одни и те же выводы микросхемы. Подача
адреса сопровождается стробирующими
сигналами:
Таблица 8.2
RAS |
CAS |
WR/RD |
A |
DI |
DO |
Режим работы |
1 |
X |
X |
X |
X |
Z |
Хранение |
0 |
1 |
X |
A |
X |
Z |
Регенерация |
0 |
0 |
0 |
A |
DI |
Z |
Запись |
0 |
0 |
1 |
A |
X |
DO |
Считывание |

На рис. 8.12 показаны временные диаграммы записи в динамическую ОЗУ (рис. 8.12, а) и процесса регенерации (рис. 8.12, б).
Запись данных в динамических ОЗУ осуществляется в следующей последовательности: на шину адреса выставляется адрес строки (1) и фиксируется стробирующим сигналом RAS (2). С некоторой задержкой выставляется адрес столбца (3) и на вход CAS (6) - активный уровень. На шину данных и вход WR/RD сигналы подаются в той же последовательности, что и в микросхемах статических ОЗУ. Функцию сигнала CS в динамических ОЗУ выполняет сигнал RAS.
В процессе регенерации участвуют только адреса строк и стробирую- щий сигнал. Сначала на адресный вход подается адрес считываемой строки (1), а затем - активный уровень сигнала RAS (2).
В современных запоминающих устройствах используются именно микросхемы динамических ОЗУ.