

3. Електричні двигуни змінного струму
3.1. Устрій і основні співвідношення асинхронних двигунів.
Асинхронної називається безколекторна машина змінного струму, у якої в сталому режимі магнітне поле і ротор обертаються з різними частотами.
Асинхронна частота обертання ротора асинхронного двигуна:
![]()
де
![]()
— синхронна частота обертання магнітного поля; s — ковзання; f — частота струму в мережі; р — число пар полюсів.
Асинхронні машини використаються на судах у вигляді короткозамкнених асинхронних двигунів й асинхронних двигунів з фазним ротором. Асинхронні двигуни залежно від числа фаз обмотки статора бувають однофазними й трифазними. Основним типом асинхронних машин, використовуваним на судах, є трифазний короткозамкнений асинхронний двигун. Двигуни з фазним ротором застосовуються відносно рідко. Надалі розглядаються трифазні асинхронні машини. Основні частини асинхронної машини показані на рис. 1.5.
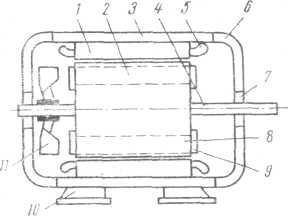
Рис. 1.5. Схема устрою асинхронного двигуна.
Сердечник статора 1, набраний як і сердечник ротора 2, зі штампованих й ізольованих друг від друга аркушів електротехнічної сталі, розташований в станині 3, установленої на фундаменті. Сердечник ротора, відділений від сердечника статора повітряним зазором, насаджується на вал машини 4. У пази сердечника статора укладається трифазна обмотка змінного струму 5, кінці якої виводяться на клемну дошку, розташовану зовні на корпусі. Спеціальними перемичками на клемній дошці три фазні обмотки статора можуть з'єднуватися зіркою або трикутником. До станини по обидва боки кріпляться болтами підшипникові щити 6, які виготовляються зі сталі або алюмінієвих сплавів. У підшипникових щитах розташовуються капсули з підшипниками 7.
Обмотка ротора короткозамкнених двигунів виконується з не ізольованих від стінок пазів алюмінієвих або мідних стрижнів 8, замкнутих між собою в торцевих (лобових) частинах кільцями 9.
У двигунах з фазним ротором виводи трифазної ізольованої від сердечника обмотки ротора приєднуються до трьох кілець, на які накладаються щітки. За допомогою щіток у ланцюг обмотки ротора на час пуску або регулювання швидкості вводиться пусковий або регулювальний реостат.
Двигуни встановлюються на лабетах 10 або за допомогою фланців. Охолоджуються двигуни вентилятором 11.
Асинхронна машина може працювати в режимах двигуна, генератора й електромагнітного гальма.
Ковзання асинхронної машини
![]()
у зазначених режимах змінюється в наступних межах:
-
при руховому режимі:
![]()
- при генераторному режимі:
- при
гальмовому режимі:![]()
Величина ковзання в режимі холостого ходу близька до нуля, але ніколи нулю не рівняється, оскільки при s = 0 струми в роторі й обертаючи моменті зникають. У номінальному руховому режимі s = 0,01 - 0,06. Ковзання асинхронного двигуна виражають як в абсолютних значеннях, так й у відсотках.
3.2. Електричні рівняння і схеми асинхронного двигуна.
У фазах обмоток статора й ротора наводяться електрорушійні сили Е1 й Е2s. ЕРС у фазі обмотки статора:
![]()
ЕРС у фазі обмотки ротора:
![]()
![]()
Тут Кф — коефіцієнт форми магнітного поля (для синусоїдального магнітного поля Коб2 — обмотувальний коефіцієнт для першої (основний) гармоніки магнітного потоку; Ф — магнітний потік одного полюса; W1 — число витків фази обмотки статора; W2м— число витків фази обмотки ротора.
Для короткозамкненого ротора асинхронної машини W2 = ½; Коб2 = 1.
При холостому ході двигуна в кожній його фазі протікає струм холостого ходу І0 , що складає 20—35% номінального струму для великих й 35—50% — для дрібних двигунів. Струм І0 включає реактивну (намагнічуючу) складову Iм, що йде на створення потоку Ф', і активну складову Іа, що враховує втрати активної потужності (на тертя, у сталі, в обмотках) у режимі холостого ходу:
![]()
Відносно невелике значення струму холостого ходу обумовлює зниження cos φ в мережах з асинхронними двигунами.
Струм (лінійне значення в амперах), споживаний трифазним двигуном з мережі під час роботи, дорівнює
![]()
![]()
де Р1 — потужність, споживана двигуном з мережі, Вт; U — лінійна напруга мережі, В.
Найбільший довгостроково припустимий для двигуна струм (в амперах), обумовлений номінальною потужністю Рном двигуна, дорівнює
![]()
де η — номінальний КПД двигуна.
Фазне значення струму в роторі визначається вираженням
![]()
Де r2, X2 — активний й індуктивний опори фази обмотки нерухомого ротора.
Для асинхронної машини з обертовим короткозамкненим ротором рівняння рівноваги ЕРС мають вигляд
![]()
де r1, X1 — активний й індуктивний опори обмотки статора.
Для полегшення виконання розрахунків характеристик асинхронних машин здійснюється приведення вторинної обмотки ротора до первинній обмотки статора, з отриманням схем заміщення асинхронного двигуна, рис. 1.6, 1.7.
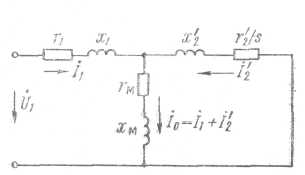
Рис. 1.6. Т - образна схема заміщення асинхронної машини.
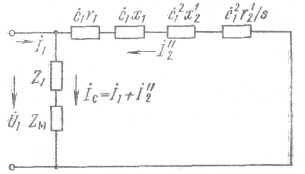
Рис. 1.7. Г-образна схема заміщення асинхронної машини.
Рівняння рівноваги напруг після приведення мають такий вигляд:
![]()
Де приведені електричні величини ротору мають значення
![]()
Коефіцієнт трансформації струму
![]()
коефіцієнт трансформації ЕРС
![]()
де
![]() — коефіцієнт, що
враховує скіс пазів статора й ротора.
При відсутності
взаємного скосу пазів
— коефіцієнт, що
враховує скіс пазів статора й ротора.
При відсутності
взаємного скосу пазів
![]()
Рівняння рівноваги струмів ураховує, що всякому збільшенню струму навантаження в роторі відповідає збільшення струму статора, і записується у вигляді
![]()
Рівнянням рівноваги напруг і струмів машини з приведеною вторинною обмоткою відповідає Т - образна схема заміщення.
У ряді випадків користаються Г - образною схемою заміщення з винесеним на затискачі контуром, що намагнічує. У Г - образній схемі заміщення поправочний коефіцієнт для опорів схемі заміщення визначається залежністю
![]()
При дослідженні асинхронних машин можна вважати, що
![]()
Приведені схеми заміщення двигунів використовують для аналізу їх роботи у різних режимах, за допомогою схем заміщення отримують механічні і електромеханічні характеристики асинхронних двигунів.
ВИВОДИ.
Автоматизованим електроприводом називається електромеханічна система, що складається з електродвигунового, перетворювального, передатного й керуючого пристроїв, призначених для надання руху корабельним механізмам й керування цим рухом.
Основним елементом автоматизованого електроприводу є електрична машина, тип і характеристики якої визначають властивості конкретного електропривода.
У якості електродвигунів сучасних корабельних автоматизованих електроприводів застосовують асинхронні двигуни і двигуни постійного струму різного способу збудження.
Залежно від режиму використання приводу на валу електродвигуна діє рушійний або гальмовий момент, а в обмотці якоря - ЕРС або проти - ЕРС машини.

2
3

4