

4. Автоматичне регулювання частоти сг
Класифікація регуляторів за принципом регулювання частоти. Частота струму залежить від частоти обертання приводного двигуна, і тому стабілізувати частоту струму можна впливом на механізми подачі палива (або пари) у приводні двигуни. Якщо ж як приводний двигун використають електродвигуни постійного струму, то керуючий вплив варто робити на їхній струм збудження.
Для генераторних агрегатів (ГА) застосовують два основних принципи регулювання частоти струму:
- по миттєвому відхиленню регульованої величини (частоти);
- по миттєвому відхиленню частоти й впливу, що обурює (навантаженню).
На першому принципі заснована робота відцентрових регуляторів частоти обертання приводних двигунів. До пристроїв, що працюють по другому принципі, відносять двох імпульсні регулятори частоти обертання приводного двигуна генератора.
Механічні регулятори по відхиленню регульованої величини. На приводних двигунах суднових генераторів в основному встановлюють відцентрові регулятори частоти обертання, які за принципом дії ставляться до регуляторів, що діють по відхиленню. Ці регулятори можуть бути як прямого, так і непрямої дії.
У регуляторах прямої дії відцентровий вимірювальний елемент безпосередньо впливає на виконавчий пристрій - рейку паливного насоса або заслінку. У регуляторах непрямої дії вплив на виконавчий пристрій передається через проміжну ланку - підсилювач (серводвигун)
Регулятори непрямої дії можуть бути із твердими або гнучкими зворотними зв'язками. Відцентровий регулятор непрямої дії із гнучким зворотним зв'язком називають ізодромнім.
Відцентрові регулятори прямої дії прості по конструкції й надійні в експлуатації. Однак вони володіють і рядом недоліків, до числа яких відносять малу швидкодію.
Регулятори непрямої дії мають трохи кращі якісні показники регулювання, однак вони мають гідравлічні систему й серводвигуни, що значно збільшує їхні розміри й підвищує вартість.
Дизель-генератори, обладнані звичайними механічними регуляторами із гнучким зворотним зв'язком, не забезпечують пропорційного розподілу навантаження між паралельно працюючими генераторами внаслідок їх астатичних швидкісних характеристик.
Комбінований двох імпульсний регулятор частоти РЧМ-50 для ДГ.
Підвищити якісні показники роботи систем стабілізації частоти можна, використовуючи принцип комбінованого регулювання, що реалізований у регуляторі РЧМ-50 (рис. 2.10).
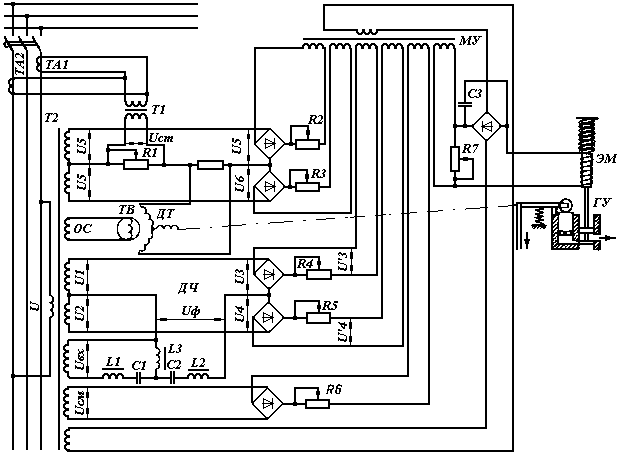
Рис. 2.10. Схема регулятора частоти із частотним фільтром.
Регулятор складається з електричних датчиків частоти ДЧ й активного струму ДТ, магнітного підсилювача МУ, гідро підсилювача ГУ й електромагніта ЭМ. У регуляторі є також вимірювальний елемент із частотним смуговим фільтром, що реагує на зміну частоти генератора. Він являє собою диференціальну фазо чутливу схему, у діагональ якої включений вихід частотного фільтра.
У вимірювальному елементі використається властивість фільтра змінювати знак зрушення фаз між напругами на вході в межах смуги пропущення від f1 до f2, залежно від значення частоти (рис. 2.11 а). У цій смузі напруга на виході фільтра при Vвиx=const залишається незмінним, а кут зрушення фаз змінюється від 0 до 180°. При зміні частоти поза смугою пропущення й незмінній напрузі на виході вимірювального елемента вихідна напруга фільтра змінюється лише по амплітуді, а зрушення фаз залишається постійним. У реальній схемі фільтр повинен бути розрахований таким чином, щоб при номінальній частоті вихідна напруга випереджала вхідне на кут φ = 90° (рис. 2.11 б).

Рис. 2.11. Амплітудна (а) і фазова (б) характеристики смугового фільтра
Як видно з векторних діаграм напруг рис. 2.12, при f=fн напруги U3 й U4 рівні. З відхиленням частоти від номінального значення кут φ збільшується або зменшується залежно від знака її відхилення й зазначена рівність напруг порушується. Напруги U3 й U4 рівняються в підсилювальному елементі регулятора. На виході вимірювального елемента результуюча напруга стає рівним Uвых=U3-U4.
На підставі наведених векторних діаграм можна написати наступні співвідношення:
![]() ;
;
![]() .
.
Найкращим режимом є той, при якому U1=U2=Uф=U. Для цього випадку напруги U3 й U4 можна представити в наступному виді:
![]() ;
;
![]() .
.
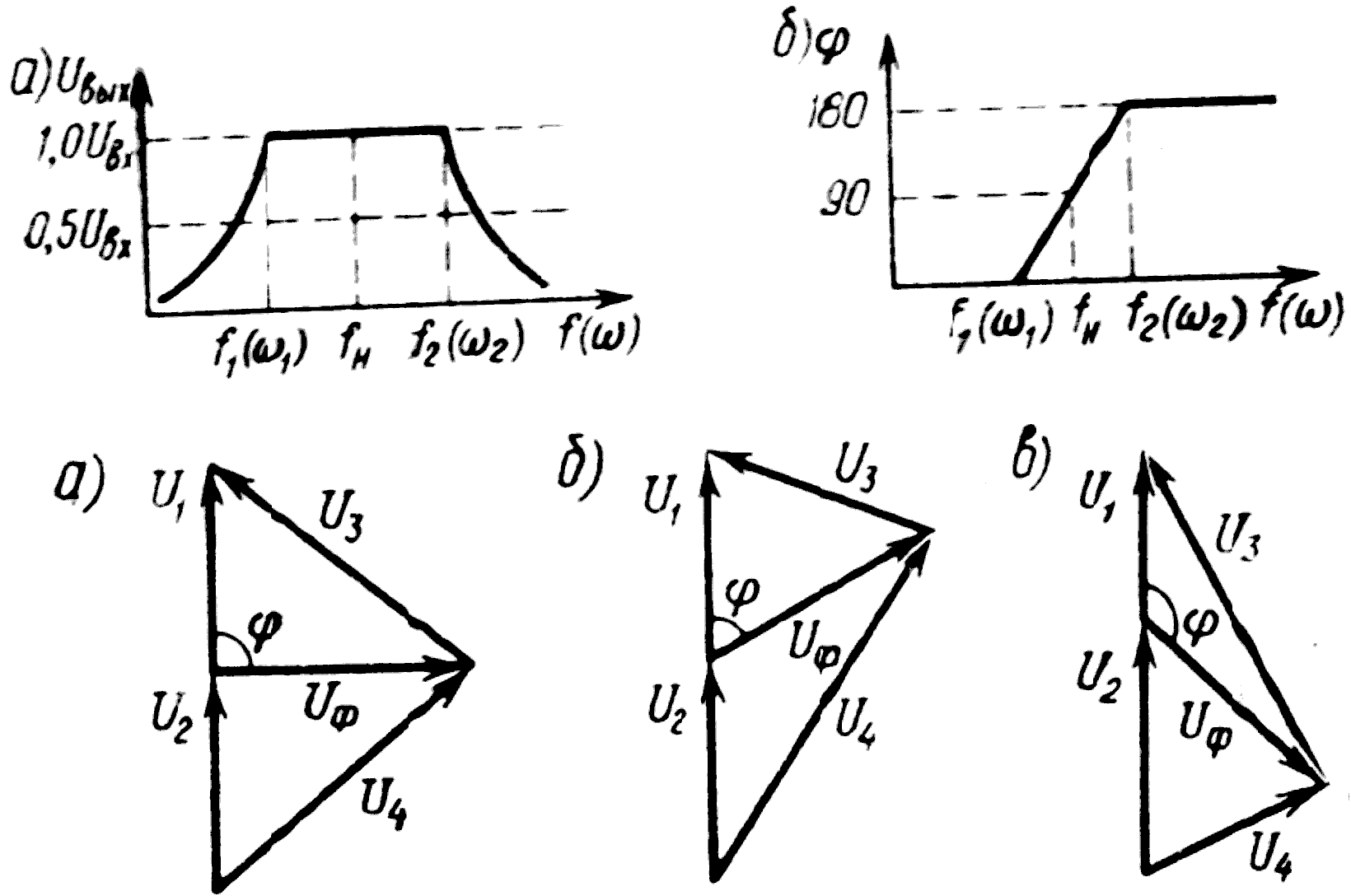
Рис. 2.12. Векторні діаграми напруги вимірювального елемента із частотним фільтром при різних значеннях частоти:
а) f = fн; б) f < fн; в) f > fн.
Скориставшись тригонометричною залежністю
![]() ,
,
одержимо вираження для напруги на виході вимірювального елемента
![]() .
.
Тоді при нижній частоті зрізу кут φ=0 і результуюча напруга на виході дорівнює -2U, а при верхній частоті зрізу кут φ=90° і результуюча напруга дорівнює 2U. Вихідна напруга вимірювального елемента можна виразити також у функції параметрів фільтра й частоти.
У середнє проведення фазо чутливого моста вимірника активного навантаження (див. рис. 2.10) уводиться сигнал негативного зворотного зв'язку від обертового трансформатора ТВ, кінематичне пов'язаного з поршнем гідро підсилювача ГУ. При сталому режимі напруга на ТВ дорівнює по величині й протилежно по фазі напрузі навантаження.
Як підсилювальний елемент для керування електромагнітом ЭМ гідро підсилювача ГУ в схемі регулятора використається магнітний підсилювач МУ. Гідро підсилювач має власний насос. Рух поршня гідро підсилювача в одну сторону відбувається під дією тиску масла, а в іншу - під дією пружини.
Випробування розглянутого регулятора показали, що вимірювальний елемент із частотним смуговим фільтром має високу чутливість і порівняно невелику інерційність. Подібні схеми два імпульсного регулювання частоти розроблені й для паро - і газотурбогенераторів.
ВИСНОВКИ
1. Вибір системи стабілізації напруги СГ є складним завданням, що залежить від тих вимог, які пред'являють до конкретної установки. Разом з тим можна висловити деякі загальні міркування по розглянутих системах.
2. Системи фазового компаундування без корекції напруги відрізняються більшою простотою, надійністю й компактністю в порівнянні із системами, що мають КН. Однак їм властива статична погрішність, що складає 3-5%.
3. Системи із КН доцільно використовувати при необхідності одержання високої точності стабілізації напруги (кращими в цьому випадку є системи з тиристорними КН).
4. Перспективними стають системи АРН з імпульсними тиристорними регуляторами, що підходять як до звичайних СГ, так і до СГ без щіток.
Лекція №3
ТЕМА: СПІЛЬНА РОБОТА ГЕНЕРАТОРІВ.
Навчальні цілі:
Розглянути умови включення синхронних генераторів на паралельну роботу.
Вивчити методи синхронізації.
3. Прищепити любов до спеціальності.
План лекції:
Введення.
1. Умови включення СГ на паралельну роботу.
Способи синхронізації.
3. Автоматичний синхронізатор УСГ-35.
Виводи.
Література:
В.С. Маркитантов, А.В. Баглай. Энергетические системы надводных кораблей. Л.: - ВВМИОЛУ им. Ф.Э. Дзержинского. 1990.
В.Г. Сиротенко. Електроэнергетические системы кораблей. Севастополь: СВВМИУ. Ч.1, 2. 1983.
Е. М. Сухарев. Судовые электрические станции, сети и их эксплуатация. - Л.: Судостроение. 1986.
В.Г. Сиротенко. Корабельные электрические сети и преобразователи. Севастополь: СВВМИУ. Ч.1, 2. 1981.
ВВЕДЕННЯ
Електроенергетична система змінного струму, установлена на кораблі, містить у собі, як правило, два й більше синхронних генераторів порівнянної потужності, що працюють роздільно або паралельно.
Основні переваги паралельної роботи генераторів:
- досягається краще завантаження генераторів і найбільш ефективне їхнє використання;
- забезпечується безперервне живлення споживачів при переході з одного генератора на іншій;
- підвищується надійність безперебійного постачання споживачів електроенергіею при виході з ладу окремих генераторів.