

3 Кинематика. Определение скорости точки при различных способах задания движения. Годограф
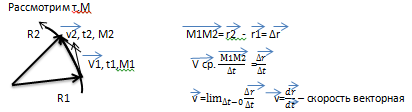
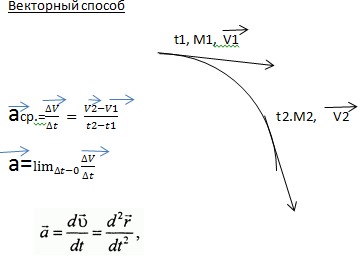
Вектор скорости точки в данный момент времени равен 1-ой производной радиус-вектора точки по времени
Определение скорости при естественном задании
V
ср= =
=
v
= v=
v= – численная величина скорости в данный
момент времени равна 1-ой производной
от расстояния (кривол. коорд S)
по времени
– численная величина скорости в данный
момент времени равна 1-ой производной
от расстояния (кривол. коорд S)
по времени

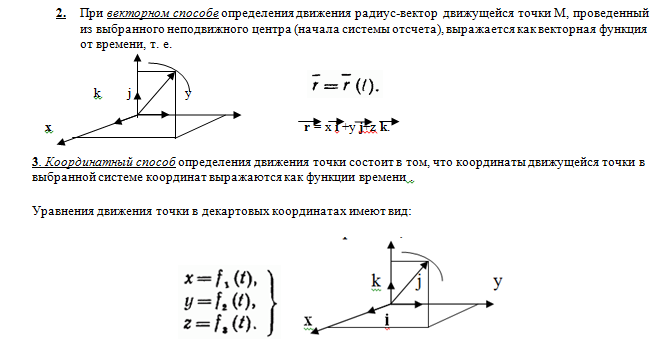
2 Вопрос основные способы задания движения
Определить движение точки — это значит уметь определить положение этой точки по отношению к выбранной системе отсчета в любой момент времени .
Траектория – непрерывная линия, которую описывает движущаяся точка относительно данной системы отсчета
В кинематике применяются три способа, описывающих движение точки: векторный, координатный и естественный.
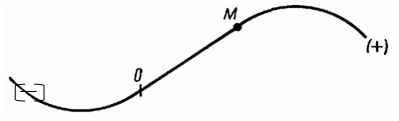
При естественном, или натуральном, способе движение точки определяется ее траекторией и уравнением движения по этой траектории:
![]()
где О — начало отсчета на траектории, a s — дуговая координата точки М или взятая с соответствующим знаком длина дуги, отсчитываемая вдоль траектории от начала отсчета до точки М.
Для задания естественного способа движения необходимо знать:
Траекторию точки
Начало отсчета на тр-рии с указанием положительного и отрицательного направления
Закон движения точки вдоль траектории (S=f(t)), где s- путь
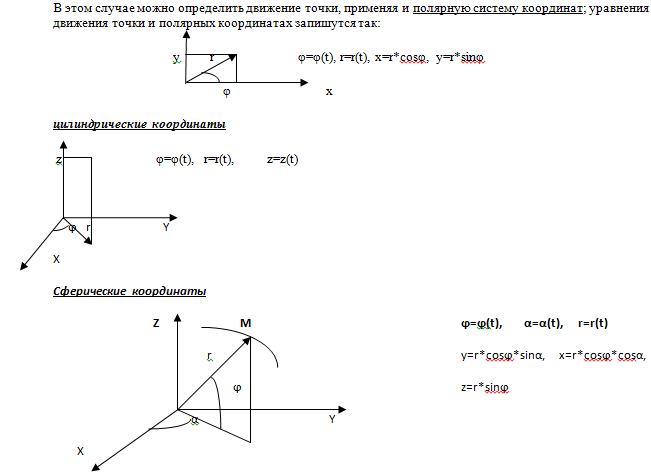
Полярные координаты
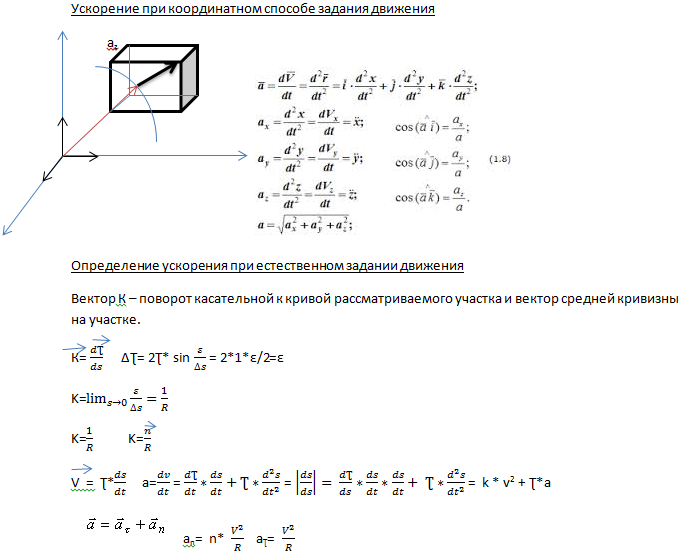
Кинематика 4 вопрос . Ускорение точки при различных способах задания движения
Ускорение- векторная величина , характеризующая с течением времени изменение модуля и направление скорости
Кинематика 5 вопрос. Поступательное
движение. Уравнения скорости, ускорения и тд.
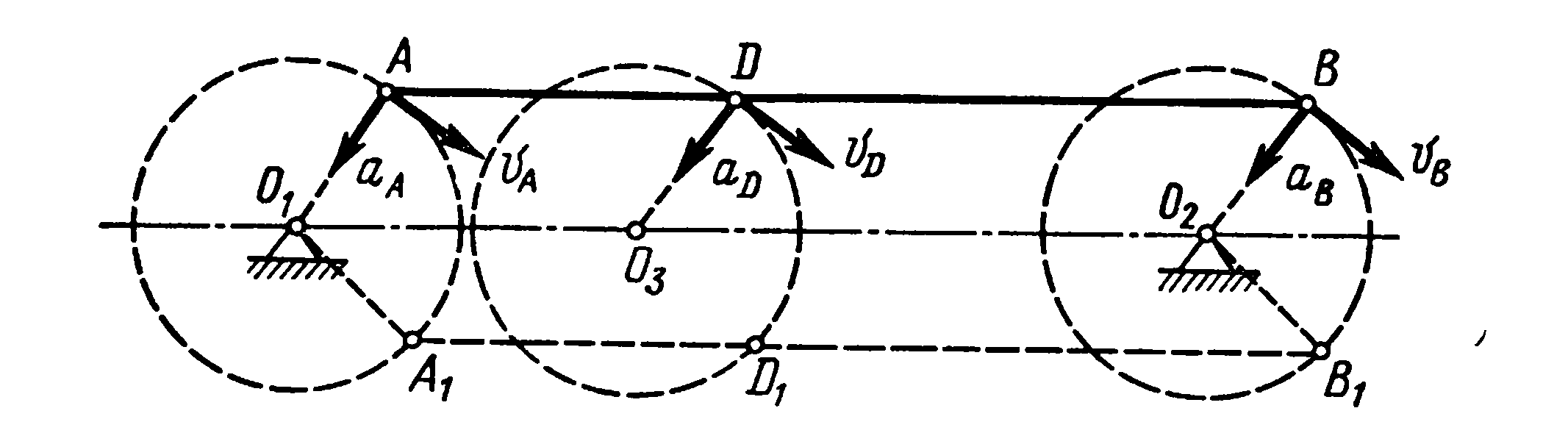
Поступательное движение твердого тела – это движение, при котором любая прямая, связанная с телом, при его движении остается параллельной своему начальному положению.
Примеры поступательного движения: движение педалей велосипеда относительно его рамы, движение поршней в цилиндрах двигателя внутреннего сгорания относительно цилиндров, движение кабин колеса обозрения относительно Земли.
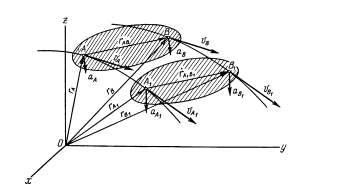
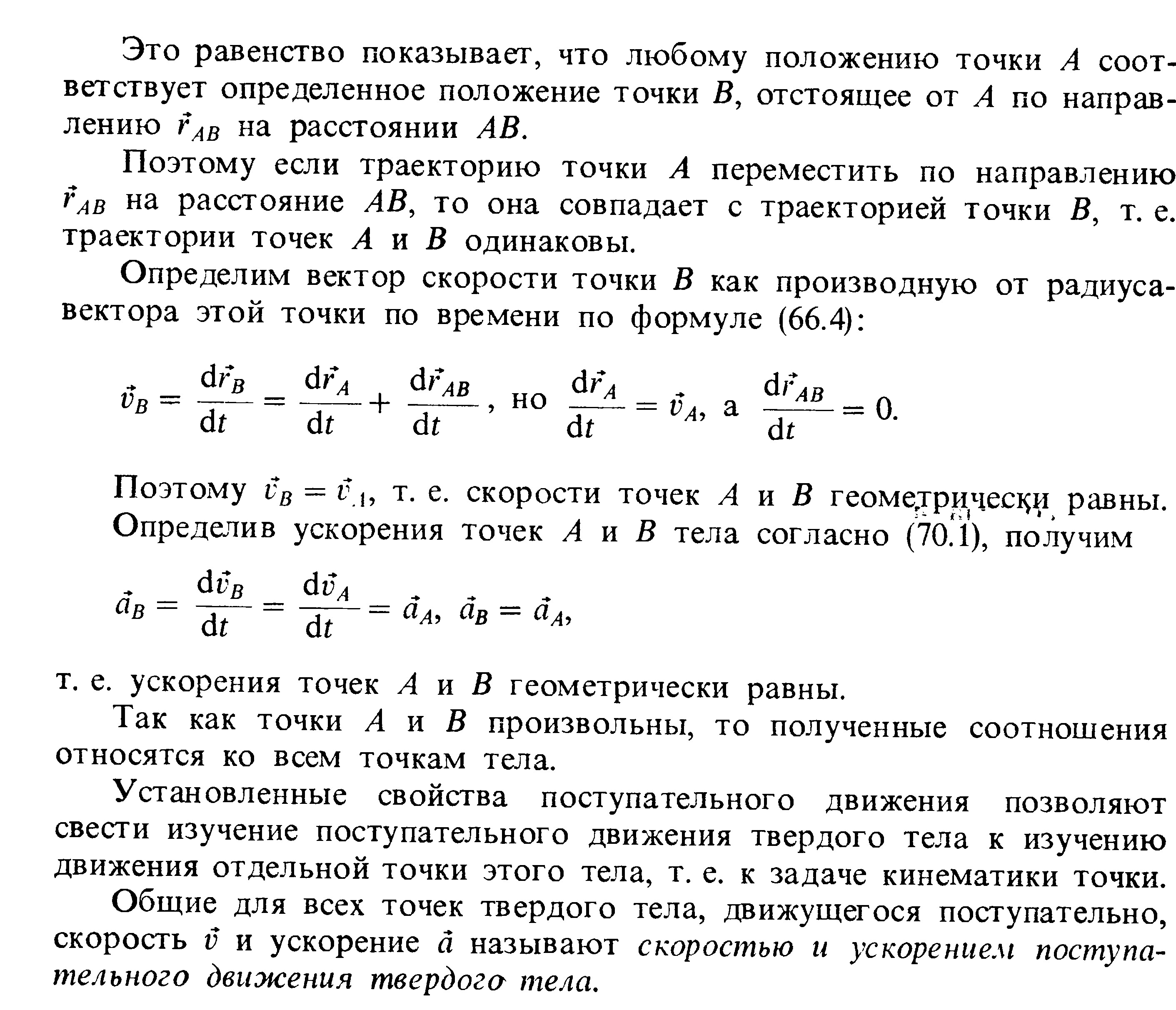
Теорема. При поступательном движении твердого тела, все точки описывают одинаковые траектории и в каждый момент времени имеют геометрически равные скорости и ускорения.
Для док-ва теоремы выберем 2 произвольные точки тела А и В и проведем из А в В радиус-вектор rАВ
9. Передаточный механизм
Передаточные механизмы передают движение от одного тела к другому. Параметры движения тел определяются с учетом параметров точек соприкосновения (зацепления) этих тел. На рисунке 2.6 (а, б, в, г) приведены различные схемы передачи движения от одного тела к другому.
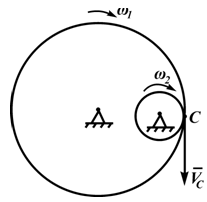
На рисунках 2.6,а и 2.6,б зависимости угловых скоростей колес определяются из соотношения Vc=ω1⋅ r1=ω2⋅ r2, т.е.
ω1/ω2=r2/r1 (2.12)
На рисунке 2.6,а (внешнее зацепление) колёса вращаются в противоположные стороны, на рисунке 2.6,б (внутреннее зацепление) колеса вращаются в одну сторону.
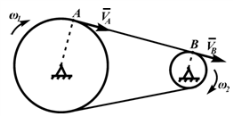
На рисунке 2.6,в показана цепная (ременная) передача. Скорости точек A и B цепи должны быть равны соответственно скоростям точек A и B , принадлежащих шкивам:
VA=ω1⋅ r1=VB=ω2⋅r2, ω1/ω2=r2/r1 .
 (2,6)
(2,6)
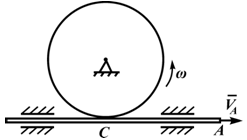
На рисунке 2.6,г поступательное движение стержня обеспечивает вращение колеса:
VA=VC=ω⋅r, ω=VA/r
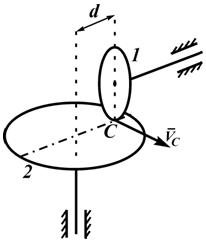
Рис. 2.7
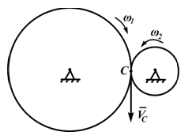
На рисунке 2.7 изображена фрикционная передача: колесо 1, прижимаясь к торцу колеса 2 в точке C, обеспечивает его вращение вокруг вертикальной оси.
VC=ω1⋅r1=ω2⋅d, ω1/ω2=d/r1