

56. Режимы движения механизмов
Полным временем движения механизма наз. промежуток времени от момента начала движения механизма до момента конца его движения. Так как закон движения всех звеньев механизма определяется законом движения начального звена, то полным временем движения механизма является также промежуток времени от момента начала движения начального звена до момента конца его движения.
Полное время движения механизма состоит из трех частей:
а) времени разбега;
б) времени установившегося движения;
в) времени выбега.
Время разбега характеризуется возрастанием скорости начального звена от нулевого значения до некоторого среднего значения, соответствующего нормальной рабочей скорости этого звена механизма. Установившимся движением механизма называется движение, при котором его кинетическая энергия является периодической функцией времени. Во время установившегося движения обычно скорость начального звена механизма колеблется около среднего значения, соответствующего нормальной рабочей скорости этого звена механизма. Промежуток времени, по истечении которого положение, скорость и ускорение начального звена механизма принимают первоначальные значения, является периодом изменения кинетической энергии механизма и называется циклом установившегося движения механизма.
Время выбега характеризуется убыванием скорости начального звена от среднего значения нормальной рабочей скорости механизма до нулевого ее значения.
На рисунке показана так называемая тахограмма механизма— кривая w = w (t) зависимости угловой скорости w начального звена от времени t. Полное время Т движения механизма состоит из времени Тр разбега, времени Ту.д установившегося движения и времени Тв выбега. Рисунке показывает, что в течение времени установившегося движения кривая скорости w = w (t)обычно имеет некоторые периодические колебания около среднего значения wср, соответствующего нормальной рабочей скорости начального звена.
На рисунке время установившегося движения имеет четыре цикла. Каждому циклу оответствует время Тц. Таким образом, общее время Т равно
T=T p+T у.д + Tв а время Т у.д равноТу.д=kT
где к — число циклов.

Периодическим движением механизма называется такое движение, при котором в течение некоторого промежутка времени механизм обладает постоянными циклами движения, причем в течение каждого цикла движение происходит по одному и тому же закону.
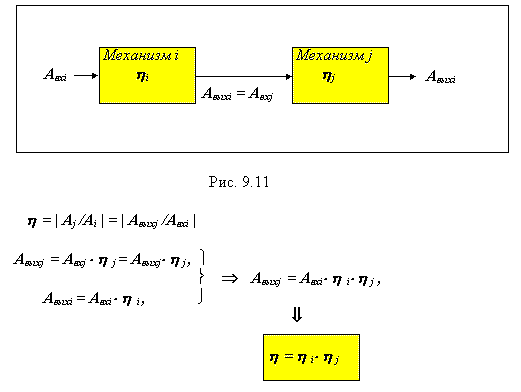
57) Определение кпд машин при последовательном, параллельном и смешанном соединении механизмов.
при последовательном соединении (рис. 9.11) весь поток механической энергии проходит последовательно через каждый из механизмов
при параллельном соединении механизмов i и j (рис. 9.12) поток механической энергии делится на две части: часть проходящую через механизм i обозначим , а часть проходящую через механизм j , причем + = 1.

58) Основы определения теории машин-автоматов.
Машина – автомат есть устройство, в котором все преобразования энергии, материалов и информации осуществляются без участия человека. Так, например, в станках – автоматах все работы и вспомогательные движения выполняются без участия человека. После выполнения совокупности движений устройство приходит в точно такое же состояние, в котором оно находилось перед их началом. Эта совокупность движений называется циклом. Машина – автомат выполняет цикл за циклом самостоятельно. Машина – полуавтомат требует вмешательства человека на границах цикла, например, для съема или установки детали.
Совокупность машин – автоматов, предназначенная для выполнения определенного технологического процесса, называется автоматической линией. Обычно кроме основного технологического оборудования в нее входят транспортные и другие вспомогательные устройства. Участие человека в работе автоматических линий состоит лишь в контроле за работой линий, наладке, устранению неисправностей. Основная сфера применения автоматов и автоматических линий – массовое и крупносерийное производство, т.к. переналадка их на новое изделие требует материальных затрат и времени.Машина – автомат состоит из одного или нескольких исполнительных органов, непосредственно воздействующих на обрабатываемый предмет, и блока управления, вырабатывающего управляющие воздействия на исполнительные органы. Источник, из которого блок управления черпает информацию, называется программой. Программа – это совокупность команд, которые должны быть выполнены для обеспечения требуемого технологического процесса. Программа разрабатывается заранее на основании проекта технологического процесса. Она физически реализуется на программоносителе.