

45) Кулачковые механизмы. Классификация кулачковых мех-ов.
Кулачковые механизмы:
Все кулачковые механизмы предназначены для преобр. вращ-го или поступат-го дв-я на входе впоступ-ое или колб-ное дв-е на выходе.
Звено на входе имеет криволинейный профиль и наз-ся кулачком. Звено на выходе совершает колебательные дв-я наз. коромыслом.
Классификация кулачковых механизмов:
Кулачковые механизмы классифицируются по следующим признакам:
по хар-ру дв-я ведущего звена: а)вращ.;б) поступат.
по хар-ру дв-я ведомого звена (звена на выходе) :а)звено на выходе соверш.колеб. перемещ.; б)звено на выходе соверш. поступат. перемещ.;в)звено на выходе соверш.сложное движение.
по конструкции:-центральный кулачковый м-м(л.д. толкателя проходит через центр вращения кулачка т. О);-нецентральный м-м(дезахсиальный)(л.д. толкателя не проходит через центр кулачка, а смещена от него на величину е)
по конструкции толкателя или коромысла:роликовый, остроконечный или игольчатый, плоский или тарельчатый, грибовидный, шаровидный.
по х-ру замыкания элементов высшей пары: под действием силы тяжести; силовое; геометрическое; При силовом замыкании удаление толкателя осуществляется воздействием контактной поверхности кулачка на толкатель (ведущее звено - кулачок, ведомое - толкатель). Движение толкателя при сближении осуществляется за счет силы упругости пружины при этом кулачок не является ведущим звеном. При геометрическом замыкании движение толкателя при удалении осуществляется воздействием наружной рабочей поверхности кулачка на толкатель, при сближении - воздействием внутренней рабочей поверхности кулачка на толкатель.
46) Основные кинематические и геометрические параметры кулачковых механизмов. Условие выбора ролика.
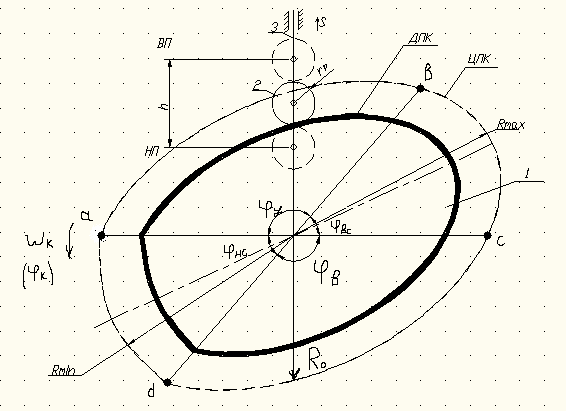
1-кулачок 2-ролик 3-толкатель
ЦПК(ТПК)-центровой (теоретический) профиль кулачка- это профиль мысленно проходящий через центр перемещения ролика
ДПК(ППК)-действительный ( практический) профиль кулачка- это профиль полученный в секущей плоскости которая проходит через кулачок перпендикулярно оси вращения кулачка.
h-ход толкателя –это расстояние между двумя крайними положениями толкателя
НП(БП)-нижнее(ближнее) положение толкателя -это наиболие близкое расположенное положение толкателя к центру кулачка
ВП(ДП) верхнее (дальнее) полож. Толкателя наиболие удаленное полож толкателя от центра вращения кулочка
Rmin-наименьший радиус кулачка для механизмов с роликом это параметр по центровому профилю для остальных по ДПК
Rmax-наибольший радиус кулачка
Ro-радиус начальной шайбы кулачка
Ro=Rmin для механизмов без ролика
Ro≠Rmin для механизмов с ролика
rp –радиус ролика
rp ≤0.35Rmin при аналетическом определении
rp ≤(0.4…0.5)Rmin
rp ≤(0.7…0.8)ρ при графическом определении
ρ-наибольший радиус кривезны кулачка(определ графически)
ab≥φу-фаза удаления работу совершает и кулакоч и толкатель ( коромысло )
Rmin≤R≠const< Rmax
bc≥ φвс-фаза верхнего стояния работу совершает толко кулачок толкатель работу не совершает мертвая точка
R=const< Rmax
cd≥φв-фаза возврата работу совершает и кулачок и толкатель
Rmax≥R≠const> Rmin
da≥ φнс-фаза верхнего стояния работу совершает толко кулачок
R=const=Rmin
φ-полная фаза кулочка (φнс+ φвс+ φв+ φу)=3600
φр-фаза рабочая (φвс+ φв+ φу)≤3600
φв= φу- симетричный кулачок
φв≠ φу- несиметричный кулачок