

29. Планетарные редукторы со сдвоенными сателлитами. Редуктор Джемса. Редуктор Давида. Определение передаточных отношений.
- расчётная формула
 ,
m=1
,
m=1
 -
расчётная формула.
-
расчётная формула.
Р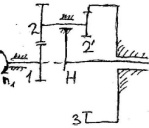 едуктор
Джеймса-
одно зацепление внешнее другое внутреннее.
На одном валу неподвижно закреплено
2-а сателлита и этот вал несёт водило.
едуктор
Джеймса-
одно зацепление внешнее другое внутреннее.
На одном валу неподвижно закреплено
2-а сателлита и этот вал несёт водило.

 ,
т.к. m=1
,
т.к. m=1
 -
расчётная формула Джеймса.
-
расчётная формула Джеймса.

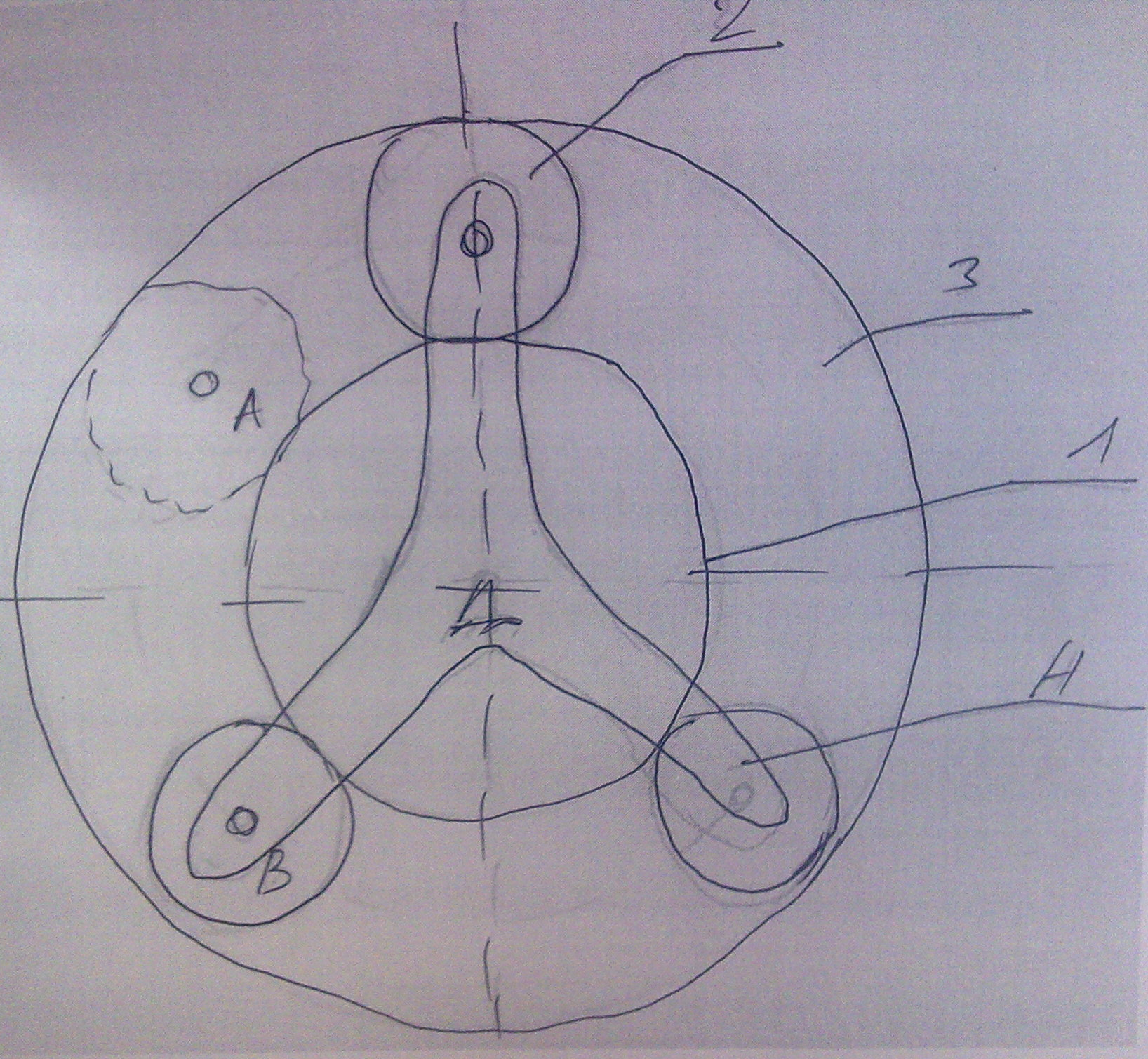
Редуктор Давида- оба зацепления внешние

 ,
т.к. m=2
,
т.к. m=2
 -
расчётная формула.
-
расчётная формула.
30. Подбор чисел зубьев планетарного редуктора (соосность, соседство, условие сборки).
Чтобы подобрать число зубьев рассмотрим 3 условия: соосности, соседства, сборки
Условие соосности - две передачи соосны если зубчатые колёса одной передачи имеют оси совпадают с осью другой передачи.

r1+
r2=
r3-
r2;
 =
=
m-модуль зацепления ,мм
Условие
сборки:
Проверяем редуктор на условие сборки
 =с
где с- любое целое число. При сборке
планетарного редуктора 1-вый пост сотелит
полностью определяет взаимное расположение
центральных колёс. Выполняется если
с-целое число.
=с
где с- любое целое число. При сборке
планетарного редуктора 1-вый пост сотелит
полностью определяет взаимное расположение
центральных колёс. Выполняется если
с-целое число.
Условие соседства
выполняется
когда расстояние между осями двух
смежных сотелитов больше диаметра
окружности их вершин. Z-
число зубьев; к-число сотелитов(в маш
строй к= 2—5) Окружности вершин сотелита
не должны пересекаться
 – формула условия соседства.
– формула условия соседства.
 – возможное число сателлитов
– возможное число сателлитов
31) Эвольвента окружности и ее основные свойства.
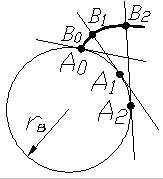
Наибольшее применение получили эвольвентные зубчатые передачи с профилем зубьев, очерченным по эвольвенте (рис. 72).
Эвольвентой круга называется траектория точки, лежащей на прямой, которая перекатывается без скольжения по окружности радиуса rв, называемой основной. рис. 72
Эвольвента имеет следующие свойства:
1) начинается с основной окружности;
2) нормаль к эвольвенте является касательной к основной окружности;
3) радиус кривизны эвольвенты в каждой её точке лежит на нормали к эвольвенте в этой точке.
Основная окружность представляет собой геометрическое место центров кривизны эвольвенты и является её эволютой.
3 2)
Основными параметрами зубчатого колеса
являются
(рис. 75):
2)
Основными параметрами зубчатого колеса
являются
(рис. 75):
рис. 75
z – число зубьев;
ra – радиус (диаметр) окружности выступов;
rf – радиус (диаметр) окружности впадин;
rb - радиус (диаметр) основной окружности;
r - радиус (диаметр) делительной окружности, т. е. окружности, которая является начальной в станочном зацеплении колеса с режущим инструментом; р – шаг по делительной окружности;
h – высота зуба, равная h=ha+hf, где:
ha – высота головки зуба;hf – высота ножки зуба;
m – модуль зацепления, определяемый из условия:
![]() ,
т. е.
,
т. е.
 (измеряется
в мм).
(измеряется
в мм).
Величина m стандартизирована, а делительная окружность является окружностью стандартного модуля. Обычно размеры зубчатого колеса и зубьев выражаются через m.
Так,
например:
![]() ,
где
,
где
![]() -
коэффициент высоты головки зуба;
-
коэффициент высоты головки зуба;
![]() ,
где
,
где
![]() -
коэффициент радиального зазора;
-
коэффициент радиального зазора;
![]() ;
;
![]() ;
;
![]() ,
где α – угол исходного контура режущего
инструмента.
,
где α – угол исходного контура режущего
инструмента.
Обычно
для стандартных зубчатых колёс:
![]() ;
;
![]() ;
α=20º.
;
α=20º.