

27. Рядовые, ступенчатые, червячные передачи конические. Определение передаточных отношений и их передач.
Р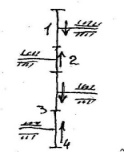 ядовые
- характеризуются
тем, что на каждом валу неподвижно
закреплено по одному колесу, все валы
параллельны. Передаточное отношение-
i(u).
m-число
внешних зацеплений.
ядовые
- характеризуются
тем, что на каждом валу неподвижно
закреплено по одному колесу, все валы
параллельны. Передаточное отношение-
i(u).
m-число
внешних зацеплений.
 число
зубьев колёс.
число
зубьев колёс.


Через угловые скорости ω:

 z-число
зубчатых колёс
z-число
зубчатых колёс

Д ля
рядовых передач параметры промежуточных
колёс на передаточное отношение не
влияет, величину передаточных отношений
формулируют входное и выходное звенья,
промежуточный ряд колёс – паразитный
ряд. Промежуточные колёса применяют
для того чтобы сформировать соответственный
знак передачи, либо необходимость
вписаться при заданном предат. Отношении
в заданное межосевое расстояние.
ля
рядовых передач параметры промежуточных
колёс на передаточное отношение не
влияет, величину передаточных отношений
формулируют входное и выходное звенья,
промежуточный ряд колёс – паразитный
ряд. Промежуточные колёса применяют
для того чтобы сформировать соответственный
знак передачи, либо необходимость
вписаться при заданном предат. Отношении
в заданное межосевое расстояние.
При
числе колёс n:
 -
для рядовой передачи. m-число
внешних зацеплений.
-
для рядовой передачи. m-число
внешних зацеплений.
- обратная задача
Ступенчатые передичи-передачи в которых на входном и выходном валу неподвижно закреплено по одному колесу на промеж. Валах неподвижно закреплено по 2 колеса. Все валы между собой параллельны.
z-известны. Для каждой пары колёс модуль должен быть единым.

Через угловые скорости:


На одно промеж. Валу зубчатые колёса, могут иметь не равное число зубьев. n-число колёс
 -ступенчатая
передача
-ступенчатая
передача
Конические передачи-
1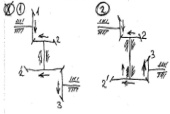 вид: на каждом валу неподвижно закреплено
по одному колесу
вид: на каждом валу неподвижно закреплено
по одному колесу
Формулы применяются такие же что и для рядовой передачи но без учёта знака. Знак передачи определяется по методу стрелок.

 –обратная
задача
–обратная
задача

2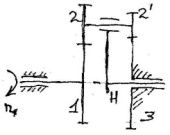 вид: на входном и выходном валу закреплено
по 1 колесу , а на промеж. Валах по 2.
вид: на входном и выходном валу закреплено
по 1 колесу , а на промеж. Валах по 2.
Для
таких видов коническ. передач применяется
ф-ла перед. отношения- для ступенчатых
передач без учёта
 ,
знак передачи опред. по методу стрелок.
,
знак передачи опред. по методу стрелок.
–обратная задача
 .1
-
.1
-
 Для рис.2-
Для рис.2-

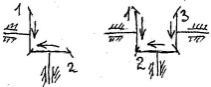
Ч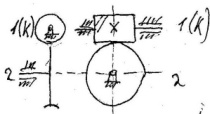 ервячные
передачи –
оси взаимноперпендикулярны и явл.
Скрещивающимися и не имеют общей точки
прикосновения.
ервячные
передачи –
оси взаимноперпендикулярны и явл.
Скрещивающимися и не имеют общей точки
прикосновения.
1- червяк, 2- червячное колесо, k-число заходов червяка.
 (
(
 ,
,
28. Кинематический анализ зубчатых механизмов с подвижными осями колес (планетарные зубчатые передачи), 4-х звенный планетарный механизм Джемса. Формула Виллиса.
Планетарные м-мы - это зубчат. передачи имещие подвижную ось. Обязательно наличие звена-«водила». Все оси на которые закреплены зубчатые колёса параллельны между собой.
Если W=1-планетарная зубчатая передача.
W≠1-дифференциальная
Редуктор Джемса. Это 4-х звенный планетарный механизм.
1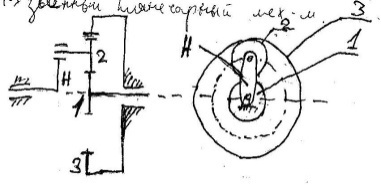 -центральное
колесо(подвижное), может быть неподвижным,
когда колесо 3 неподвижно(-солнечное
центральное колесо), 2-саттелит-подвижное
колесо(вращается вокруг колеса 1),
3-центральное неподвижное, может быть
подв., когда колесо 1 неподвижно.(-опорное
колесо),
-центральное
колесо(подвижное), может быть неподвижным,
когда колесо 3 неподвижно(-солнечное
центральное колесо), 2-саттелит-подвижное
колесо(вращается вокруг колеса 1),
3-центральное неподвижное, может быть
подв., когда колесо 1 неподвижно.(-опорное
колесо),
Н-водило- подвижное звено несущее вал сателлита. (1-2)-вр.п., 5 кл.;(2-Н)- вр.п., 5 кл.;
(Н-0)- вр.п., 5 кл.;(1-2),(2-3)-4 кл.
m=4-все звенья
n=3-подвижные звенья(1,2,Н)

 -для
определения применяем метод обращонного
дв-я.
-для
определения применяем метод обращонного
дв-я.
Всей
системе придают такую угловую скорость
которая = угловой скорости водила Н, но
противиположна по направлению.
 .
.

 -исходная
формула Виллеса
-исходная
формула Виллеса