

4.4. Графическое решение задачи минимизации
Мы рассмотрели графическое представление модели максимизации. Однако, как уже отмечалось в главе 3, многие реальные модели призваны решать задачи минимизации. Примером такой модели может служить модель компании Eastern Steel, рассмотренная в главе 3. Применение графического метода к моделям минимизации во многом аналогично поиску максимума; единственное отличие заключается в том, что оптимизирующим направлением для прямой целевой функции является "спуск", а не "подъем''. В модели максимизации прямые целевой функции зачастую представляют собой изолинии прибыли. В моделях минимизации прямые целевой функции обычно являются изолиниями затрат. В модели минимизации необходимо найти угловую точку допустимой области, лежащую на самой нижней прямой целевой функции, пересекающей допустимую область. В качестве примера используем программу GLP для поиска решения следующей простой задачи минимизации с двумя переменными решения х1 и х2.
Минимизировать
![]()

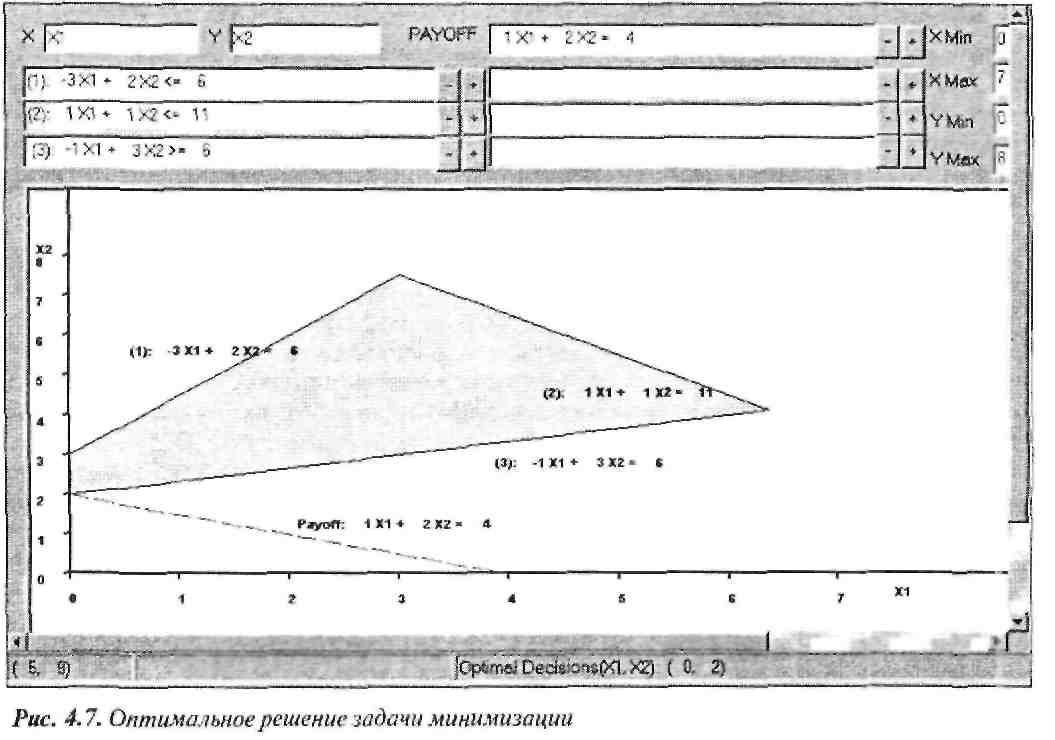
На рис. 4.7 представлена GLP-версия данного примера. Эту модель можно оптимизировать, сдвинув прямую целевой функции на юго-запад (или щелкнув на кнопке Auto Min (Автоминимум), на которой изображена стрелка, направленная вниз).
![]()
как показано на рис. 4.7
откуда следует х = 0 и х1 = 2 ,
стрирует, что если двигать прямую целевой функции в оптимизирующем направлении, графический анализ модели минимизации идентичен анализу модели максимизации.
Следует сделать одно предостережение. Студенты зачастую попадают в ловушку, считая, что решение задачи максимизации всегда находится в наиболее удаленном от начала координат углу, а оптимальное решение задачи минимизации — в начале координат, если данная точка входит в допустимую область, в противном случае (когда начало координат не является допустимым решением) — в углу, ближайшем к началу координат. Такие суждения могут оказаться неверными. Они основаны на впечатлении, что подъем целевой функции всегда направлен строго на северо-восток от начала координат, а спуска — строго на юго-запад к началу координат. На самом деле не существует всеобщей связи между подъемом или спуском целевой функции и началом координат.
4.5. Неограниченные и недопустимые модели
Итак, мы рассмотрели геометрическое представление оптимизационных моделей ЛП с двумя переменными решения. Приведенные геометрические примеры позволили сделать важное заключение: если задача имеет оптимальное решение, всегда хотя бы одно решение будет находиться в угловой точке области допустимых решений. Теперь рассмотрим, в каких случаях задача ЛП не имеет оптимального решения. Вновь воспользуемся геометрическим представлением.
Неограниченные модели
Вернемся к графическому изображению модели Oak Products на рис. 4.3, однако теперь изменим ее, предположив, что все ограничения, кроме (4.4) и (4.7), по невнимательности были пропущены. Графическое представление новой модели в программе GLP показано на рис. 4.8. Как видим, теперь допустимая область неограниченно простирается в восточном направлении, поэтому можно сколь угодно далеко двигать линию целевой функции в этом направлении. Щелчок на кнопке Auto Max приведет к появлению сообщения о неограниченности допустимой области, показанного на рис. 4.8.
Поскольку для данной конкретной модели оптимизирующим направлением является восточное, можно найти допустимое решение со сколь угодно большими значениями целевой функции. Иными словами, можно получить прибыль, стремящуюся к бесконечности. У такой модели нет решения, поскольку целевая функция неограничена. Таким образом, для любого набора допустимых значений переменных решения можно найти другие допустимые значения, которые улучшат значение целевой функции. Модели такого типа называются неограниченными моделями. Неограниченная модель— это аномалия. Такая модель может получиться, если, как в представленном на рис. 4.8 случае, одно или несколько ограничений были пропущены или были допущены ошибки при вводе неравенств, задающих ограничения. В реальной жизни никому еще не удалось найти способ получения бесконечной прибыли, поэтому можно не сомневаться, что корректно сформулированная и правильно введенная модель не будет неограниченной. Заметим, что модель с неограниченной допустимой областью не обязательно является неограниченной моделью. Например, если на рис. 4.8 для другой целевой функции увеличение ее значений происходит при движении в северо-западном направлении, такая задача будет иметь решение.
Недопустимые модели
Как уже отмечалось в главе 3, существует другой тип аномалии, которой необходимо избегать в линейном программировании. Это недопустимость {несогласованность) ограничений. Этим термином обозначаются модели, множество допустимых значений которых пусто, т.е. ни одна комбинация значений переменных решения не удовлетворяет всем ограничениям одновременно. Приведем пример недопустимой модели линейного программирования.
![]()

Графическое представление области решений для данной модели ЛП показано на рис. 4.9. Нетрудно убедиться, что не существует пары значений Е и F, соответствующей всем ограничениям.
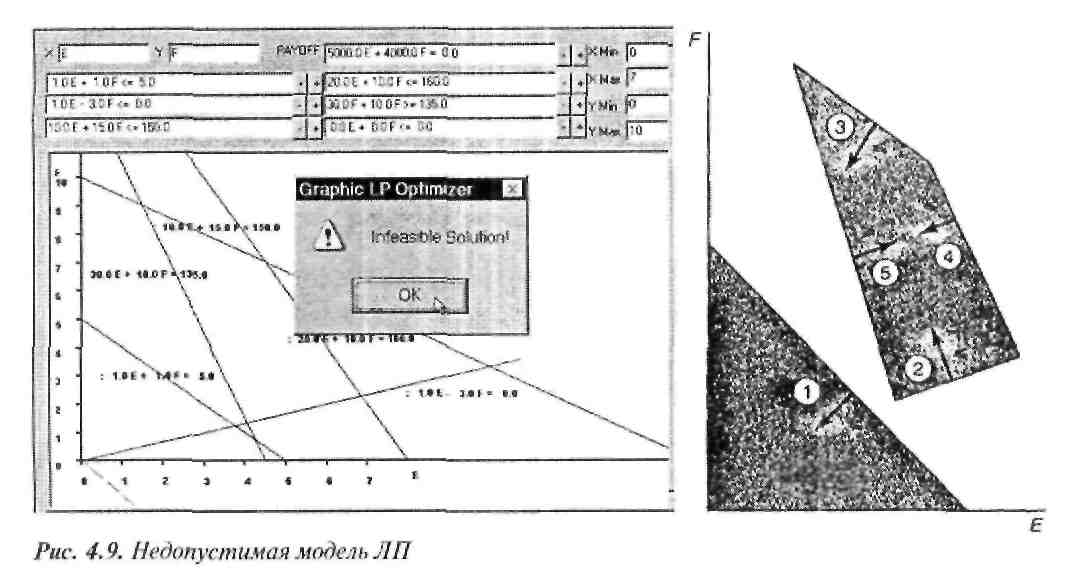
Как следует из рис. 4.9, отсутствие допустимых решений зависит только от ограничений и не зависит от целевой функции. Очевидно, что недопустимая задача Л П не имеет решений, но аномалии такого рода не возникают в корректно разработанных моделях. Иными словами, недопустимость в правильно поставленной задаче всегда означает, что модель неправильно описана: возможно, ошибки могут заключаться в том, что ограничений слишком много или неправильны некоторые неравенства ограничений. Подведем итог.
Каждая задача линейного программирования относится к одной из трех взаимоисклю-чающих категорий.
Задача имеет оптимальное решение.
Оптимального решения нет, поскольку модель является неограниченной.
Оптимального решения нет, поскольку модель не имеет допустимых решений.
На практике корректно сформулированная задача ЛП всегда имеет решение. Неограниченные и недопустимые модели являются результатом ошибок при формировании модели или вводе ограничений в Excel либо GLP.