


Содержание
Введение 3
1 Структурный анализ механизма 5
1.1 Задачи структурного анализа 5
1.2 Структурный анализ рычажного механизма 7
1.3 Структурный анализ зубчатого механизма 9
2 Кинематический расчет зубчатого механизма 11
3 Кинематический расчет рычажного механизма 13
3.1 Построение плана положений рычажного механизма 13
3.2 Построение плана скоростей 15
3.3 Построение плана ускорений 19
3.4 Построение кинематических диаграмм 25
Заключение 28
Список использованных источников 29
……………
Введение
Одной из ведущих отраслей современной техники является машиностроение. По уровню развития машиностроения судят о развитии производительных сил в целом. Прогресс машиностроения в свою очередь определяется созданием новых высокопроизводительных и надёжных машин. Решение этой важнейшей проблемы основывается на комплексном использовании результатов многих дисциплин и, в первую очередь, теории механизмов и машин.
Теория механизмов и машин - наука об общих методах исследования свойств механизмов и машин и проектировании их схем.
Качество создаваемых машин и механизмов в значительной мере определяется полнотой разработки и использования методов ТММ. Чем более полно будут учтены при построении механизмов и машин критерии производительности, надёжности, точности и экономичности, тем совершеннее будут получаемые конструкции.
В данной контрольной работе требуется спроектировать и произвести структурный анализ и синтез зубчатого механизма, кинематический и силовой анализ рычажного механизма технологической машины.
Рационально спроектированная машина должна удовлетворять социальным требованиям - безопасности обслуживания и создания наилучших условий для обслуживающего персонала, а также эксплуатационным, экономическим, технологическим и производственным требованиям. Эти требования представляют собой сложный комплекс задач, которые должны быть решены в процессе проектирования нового механизма.
Пояснительная записка содержит введение, три основных раздела и заключение.
В разделе «Структурный анализ механизма» определена степень подвижности механизма, осуществлена его разбивка на структурные группы и записана формула строения механизма. Для выполнения этой задачи используется метод разбивки на структурные группы, разработанный Л. Ассуром.
В разделе «Кинематический расчёт зубчатого механизма» определено передаточное отношение зубчатого механизма, связывающей вал электродвигателя с муфтой и рычажный механизм.
Передаточное число планетарной передачи определяется методом обращенного движения с использованием формулы Виллиса.
В разделе «Кинематический расчёт рычажного механизма» определены скорости и ускорения характерной точки механизма и угловые скорости и угловые ускорения его звеньев.
Анализ проводится двумя методами: методом планов скоростей и ускорений и методом кинематических диаграмм. Расхождения в результатах, полученных разными методами, не должны превышать установленной величины.
В разделе «Силовой расчёт рычажного механизма» методом плана сил найдены реакции в кинематических парах и найдена уравновешивающая сила (уравновешивающий момент) с помощью Н.Е. Жуковского.
В разделе «Заключения» приведены итоги выполненного исследования.
1 Структурный анализ механизма
1.1 Задачи структурного анализа
Исходные данные приведены в таблице 1.1
Таблица 1.1 - Исходные данные для проектирования механизма.
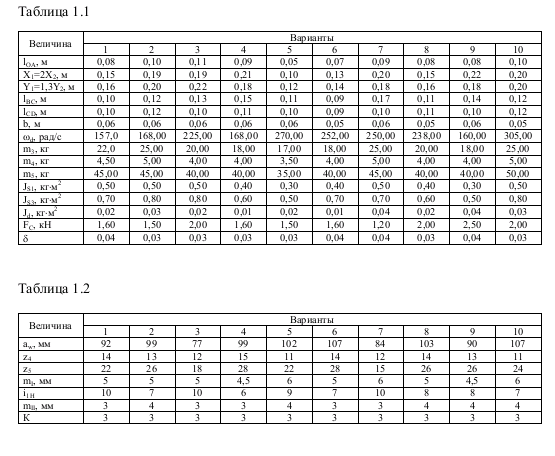
Вариант числовых данных - 8

Рисунок 1.1 - Схема рычажного механизма
Задачами структурного анализа исследуемого механизма являются:
- определение степени подвижности механизма;
- разбивка кинематической цепи механизма на структурные группы;
- определение формулы строения механизма.
В состав машины входят: электродвигатель 1, муфта 2, зубчатый механизм 3, рычажный механизм 4.

Рисунок 1.2 - Привод механизма
Структурный анализ рычажного механизма
Структурная схема рычажного механизма представлена на рисунке 1.3.

Рисунок 1.3 - Структурная схема рычажного механизма
Тип механизма – кривошипно-кулисный.
Механизм состоит из семи звеньев: двух неподвижных (стойка О, и В) и четырех подвижных (кривошип 1, камень кулисы 2, кулиса 3, шатун 4, ползун 5). Звенья соединены низшими (вращательными и поступательными) кинематическими парами.
Стойка О образует с кривошипом 1 шарнир О,
кривошип 1 с ползуном 2 — шарнир А,
ползун 2 с кулисой 3 - поступательную пару А,
кулиса 3 со стойкой В – шарнир В,
кулиса 3 с шатуном 4 — шарнир С,
ползун 5 с шатуном 4 — шарнир D,
Все пары пятого класса. Пары четвёртого класса (высшие) отсутствуют.
Определим степень свободы (подвижности) механизма. Поскольку механизм плоский, воспользуемся формулой Чебышева:
W = 3n — 2р5 — р4 (1.1)
где, n - число подвижных звеньев механизма;
р5- число кинематических пар 5-го класса;
р4 - число кинематических пар 4-го класса.
Для исследуемого механизма n=5, р5=7, р4=0. Следовательно,
W = 3·5-2·7-0 = 1.
Разобьём кинематическую цепь механизма на структурные группы.
Поскольку степень подвижности механизма W=l, то сначала выделяем один начальный механизм (механизм І класса), включающий стойку А и кривошип 1. Далее выделяем две группы II класса. Первая группа состоит из двух звеньев – камня кулисы 2 и кулисы 3 и включает три кинематические пары: А, В и В2,3.
Вторая группа также состоит из двух звеньев - шатуна 4 и ползуна 5 — и содержит три кинематические пары: D, С, и D5.
Следовательно, формула строения механизма имеет вид:
І 1 → ІІ2 → ІІ2 .
1.3 Структурный анализ зубчатого механизма
Зубчатый механизм, состоящий из планетарного механизма и зубчатой передачи внешнего зацепления, изображен на рисунке 1.4.
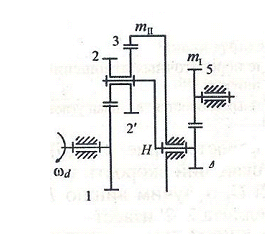
Рисунок 1.4 – Схема зубчатого механизма
Этот планетарный механизм имеет опорное звено, а водило является выходным звеном поэтому механизм относится к планетарным редукторам.
Планетарный редуктор (однорядный механизм с одним внутренним и одним внешним зацеплением), состоит из центрального колеса 1, эпицикла 3, сателлитного колеса 2 и 2’ и водила Н имеет передаточное число i1Н.
Определим степень свободы (подвижности) механизма. Поскольку механизм плоский, воспользуемся формулой Чебышева:
W = 3(n-1) — (2р1 +1р2) (1.1)
где, n - число звеньев механизма (2,2’,Н – подвижные и 3 - неподвижное);
р1- число одноподвижных (1 класс) кинематических пар (вращательные пары образованные звеньями 2-Н, Н-2’, 3-2’);
р2 - число двухподвижных (2 класс) кинематических пар (зацепления колес 5-4, 3-4).
Для исследуемого механизма n=4, р1=3, р2=2. Следовательно,
W = 3(4-1) — (2·3+1·2) = 1.