

2.2. Разработка функциональной схемы системы автоматического регулирования и формирование ее математической модели
На основании полученного уравнения динамики ГД и выбранного регулятора частоты вращения «Вудворд» UG – 8 построим функциональную схему САР.
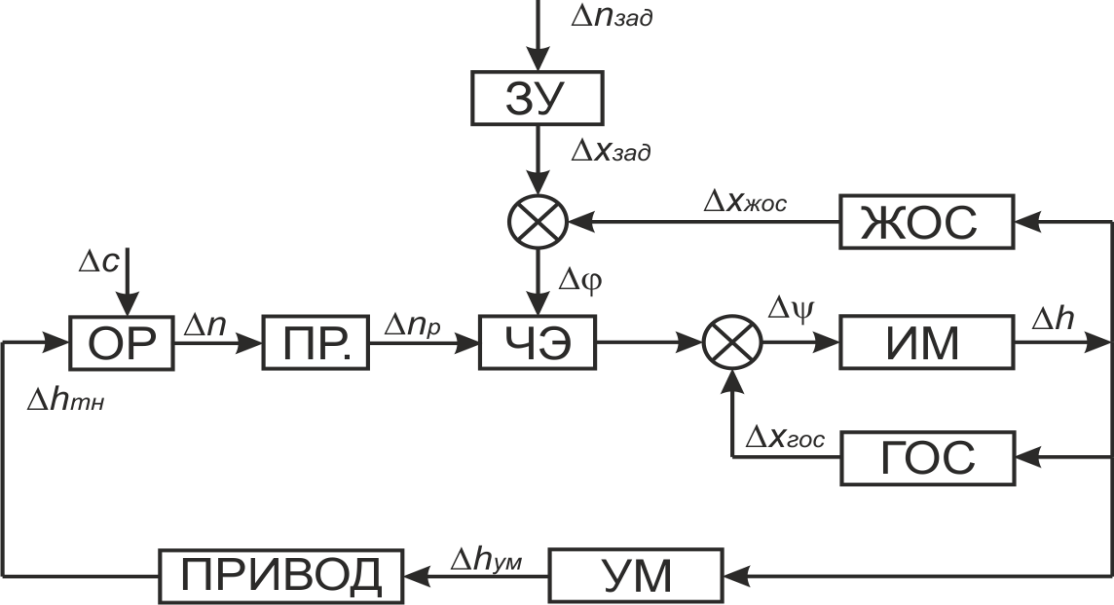
Рис. 10 Функциональная схема САР.
Для составления математической модели системы автоматического регулирования запишем следующие уравнения узлов регулятора и уравнение главного двигателя
|
|
(20) |
|
|
(21) |
|
|
(22) |
|
|
(23) |
|
|
(24) |
|
|
(25) |
|
|
(26) |
|
(27) |
|
|
|
(28) |
|
|
(29) |










2.2.1 Вывод уравнения динамики сар
Для вывода общего уравнения динамики воспользуемся полученными выше уравнениями для всех элементов. Методом исключения промежуточных фазовых переменных величин преобразуем систему уравнений (20) - (29) к единому дифференциальному уравнению динамики системы автоматического регулирования в целом.
Подставим выражения (23) н (25) в уравнение (61), а затем видоизмененное последнее в уравнение (21). Тогда уравнение динамики измерительного устройства регулятора принимает вид:
|
(30) |

Из уравнения (24) определим
|
(31) |

а из (22)
|
(32) |

Подставив выражения (31) и (32) в равенство (27), получим общее уравнение ИМ, ГОС и связывающего их сумматора:
|
(33) |

После этого подставим выражение (33) в уравнение динамики измерительного устройства регулятора (30):
|
(34) |

Преобразовав выражение (34), получим уравнение динамики автоматического регулятора в виде
|
(35) |

Из уравнения (28) получим
|
(36) |

Подставив выражения (29) и (36) в уравнение (35), будем иметь
|
(37) |

Из уравнения (20) ОР находим
|
(38) |

Условие замыкания
|
|

Подставив уравнение (38) в (37), получим дифференциальное уравнение динамики замкнутого контура автоматического регулирования в операторной форме следующего вида
|
(39) |

После преобразований получим общее уравнение САР:
|
(40) |

2.2.2. Статика регулятора и выбор его параметров
Уравнение динамики (35) регулятора в целом дает возможность сделать ряд важных выводов в части его статических свойств и особенностей как автономно рассматриваемого устройства. Формально, при выполнении условия p= 0, это уравнение порождает уравнение статического равновесия регулятора в виде
|
|

Отсюда
или
|
(41) |


Здесь будем считать, что
|
(42) |
|
(43) |


где Кр и Кзад – коэффициенты усиления регулятора в целом соответственно по частоте вращения его приводного вала и каналу задания скоростного режима, инд/(об/мин)р и инд/ед изм ЗУ