

5.2.4. Граф-схемы алгоритмов
Последовательность функционирования дискретного автомата мажет быть представлена в виде структурного алгоритма через его граф схему. Основу граф-схемы алгоритма составляют структурные блоки или операторы структуры, которые могут быть следующими:
Начала, конца;
Ввода, вывода;
Линейными (или следования);
Ветвления;
Цикла;
Подпрограммными.
Рассмотрим принцип построения граф-схемы алгоритма на примере фрагмента алгоритма работы автоматического регулятора температуры, представленного на рис.8. После ввода задающих параметров, определяющих верхнюю и нижнюю границу регулирования температуры, производится опрос датчика температуры. Если нижняя граница заданного температурного диапазона будет ниже фактической температуры, то алгоритм переключается на повторный опрос датчика (так реализуется петля графа). Этот процесс будет продолжаться до тех пор, пока при нажатии на кнопку «пуск» не выполнится условие «да». После чего произойдет переход на включение нагревателя. Продолжение алгоритма будет аналогичным, только контроль в этом случае будет происходить по верхней границе температурного диапазона, при превышении которого произойдет переход к выключению нагревателя


Рис.8. Алгоритм работы регулятора температуры.
5.2.5. Логические схемы алгоритмов.
В этой схеме на
вход логического элемента «И»
одновременно подаются три сигнала от
датчиков контроля параметров некоторого
объекта. Если сигналы датчиков Х2
и Х3
одновременно нулевые, а сигнал датчика
Х1
единичен то на выходе этого элемента
формируется единичный сигнал, который
через транзисторный ключ удерживает
пусковое реле «Р» объекта во включенном
состоянии.

Рис.9. Логическая блок-схема системы защиты.
При появлении единичного сигнала хотя бы на одном из входов Х2 или Х3 или логического нуля на входе Х1 элемента «ИЛИ-НЕ» переводит его выходной сигнал в нулевое состояние, в результате чего пусковое реле «Р» отключается.
5.3.Структурный синтез дискретных автоматов как систем управления.
Для структурного синтеза дискретного автомата выберем нижний уровень системы управления шахтного водоотлива. Функциональная структурная схема этой системы представлена на рис.10.
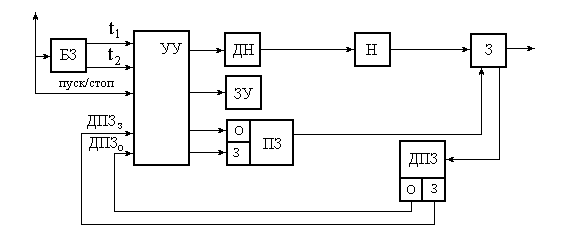
Рис.10. Функциональная схема системы управления шахтного водоотлива.
На этой схеме приняты следующие обозначения:
БЗ – Блок задержки времени;
ДПЗз – Датчик положения задвижки (закрыто);
ДПЗо - Датчик положения задвижки (открыто);
t1 - Время заливки насоса ;
t2 - Время набора производительности насосом;
УУ - Устройство управления насосом;
ДН - Двигатель насоса;
ЗУ - Устройство заливки насоса;
ПЗ - Привод задвижки;
Н - Насос;
З - Задвижка.
С верхнего уровня управления этой системы на вход устройства управления поступает сигнал «пуск» (или «стоп»), который одновременно запускает блок задержки времени. Этот блок последовательно выдает два временных сигнала. Первый сигнал «t1» регистрирует время заливки насоса, второй сигнал «t2» регистрирует время разгона привода насоса. Входные сигналы датчиков ДПЗз и ДПЗо фиксируют положение задвижки «З» (открыто или закрыто). Один из выходных сигналов устройства управления включают устройство заливки насоса «ЗУ», а другие приводы главного насоса «ДН» и задвижки «ПЗ». Положение задвижки. контролируется датчиком положения
з
На
рис.11. представлен упрощенный вариант
схемы системы управления шахтным
водоотливом, которая будет использована
как дискретная система управления этим
процессом. На основе этой схемы построим
табличные функции δ
и λ
,
которые соответственно представим в
таблицах 3, 4 и 5.
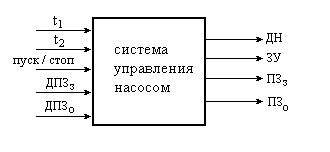
Рис.11. Упрощенная схема системы управления шахтного водоотлива.
Тактовое состояния входных сигналов в этой системе отражено в табл. 3.
Пояснение содержания таблицы 3 Цикл управления насосом шахтного водоотлива состоит из восьми тактов. В такте Х0 система находится в состоянии ожидания приема с верхнего уровня управления сигнала «пуск». Сигналы t1 и t2 в этом такте находятся на безразличном уровне, так как таймеры не запущены. Сигнал датчика ДПЗ0 имеет нулевой уровень, потому что задвижка закрыта, а
сигнал датчика ДПЗз имеет наоборот единичный уровень. Эти сигналы не меняют своего состояния в течение пяти тактов, пока задвижка остается закрытой. В такте Х1 на вход «пуск/стоп» устройства управления приходит единичный пусковой сигнал, который остается таким в течении последующих шести тактов.
Таблица 3.
|
Пуск/ /стоп |
t1 |
t2 |
ДПЗо |
ДПЗз |
После получения этого сигнала блок задержки времени запускает заливочное устройство и таймер t1, поэтому на этом входе первоначально появляется нулевой сигнал запуска таймера. На следующем такте Х2 таймер t1 выдает единичный сигнал прекращения заливки насоса. |
Х0 |
0 |
- |
- |
0 |
1 |
|
Х1 |
1 |
0 |
- |
0 |
1 |
|
Х2 |
1 |
1 |
- |
0 |
1 |
|
Х3 |
1 |
- |
0 |
0 |
1 |
|
Х4 |
1 |
- |
1 |
0 |
1 |
|
Х5 |
1 |
- |
- |
1 |
0 |
|
Х6 |
1 |
- |
- |
1 |
0 |
|
Х7 |
х |
- |
- |
0 |
1 |
|
|
|
|
|
|
|
На такте Х3 блок задержки времени запускает таймер t2 , который контролирует время запуска двигателя главного насоса. На этом такте и далее параметр t1 переходит уже в безразличное состояние. На такте Х4 заканчивается переходной процесс пуска двигателя насоса поэтому параметр t2 переходит на единичный уровень.
На такте Х5 насос переходит на рабочий режим откачки воды, поэтому система управления включает привод задвижки на открытие, в результате чего параметры ДПЗ0 и ДПЗз противоположно меняются, а вход t2 становится безразличным. Такт Х6 является основным рабочим тактом. Сигналы этого такта остаются такими же, как и в предыдущем такте. Одновременно в этом такте производится контроль работоспособности системы управления. В случае появления аварийного сигнала система управления переходит на такт Х7, на котором закрывается задвижка и выключается привод насоса, в результате чего параметры ДПЗ0 и ДПЗз снова противоположно меняются.
Состояние выходных сигналов системы управления представлено в табл. 4.
Где: Y0
– нулевое состояние системы Y1
- заливка
насоса Y2
- включение
насоса, отключение
заливки Y3
- работа
насоса и открытие Задвижки Y4
- отключение
насоса и закрытие задвижки
Таблица 4
|
ЗУ |
ДН |
ПЗо |
ПЗз |
Y0 |
0 |
0 |
0 |
0 |
Y1 |
1 |
0 |
0 |
0 |
Y2 |
0 |
1 |
0 |
0 |
Y3 |
0 |
1 |
1 |
0 |
Y4 |
0 |
0 |
0 |
1 |
Пояснение содержания таблицы 4 При действии выходного сигнала Y0 (нулевое состояние системы) все устройства водоотлива отключены.
При появлении выходного сигнала Y1 включается заливочное устройство остальные устройства пока отключены. Выходной сигнал Y2 выключает заливочное устройство и включает двигатель главного насоса. Сигнал Y3 открывает задвижку при работающем приводе насоса, а сигнал Y4 закрывает задвижку и отключает привод насоса.
Для построения графа алгоритма системы управления шахтного водоотлива построим таблицу 5, в которой объединим содержание двух предыдущих таблиц..
Таблтца 5
|
а1 |
а2 |
а3 |
а4 |
а5 |
а6 |
Список внутренних состояний а1 – начальное состояние; а2 – заливка насоса; а3 – включение двигателя насоса; а4 – включение привода задвижки и работа насоса; а5 – нормальная работа |
Х0 |
а1/ Y0 |
а1/ Y0 |
а1/ Y0 |
а6/ Y4 |
а6/ Y4 |
а6/ Y4 |
|
Х1 |
а2/ Y1 |
а2/ Y1 |
- |
- |
- |
а6/ Y4 |
|
Х2 |
- |
а3/ Y2 |
- |
- |
- |
а6/ Y4 |
|
Х3 |
- |
- |
а3/ Y2 |
- |
- |
а6/ Y4 |
|
Х4 |
- |
- |
а4/ Y3 |
- |
- |
а6/ Y4 |
|
Х5 |
- |
- |
- |
а4/ Y3 |
|
а6/ Y4 |
|
Х6 |
- |
- |
- |
а5/ Y2 |
а5/ Y2 |
а6/ Y4 |
|
Х7 |
- |
- |
- |
- |
- |
а1/ Y4 |
насоса с открытой
задвижкой;
а6 – выключение привода
насоса и закрытие
задвижки.
Пояснение содержания таблицы 5. Во время такта Х0 система находится в состоянии ожидания, при этом любая попытка включения привода в состояниях а4 , а5, а6 вызывает появление сигнала Y4.обеспечивающего возврат В такте Х1 из начального состояния система переходит в состояние заливки насоса и находится в этом состоянии в течение следующего такта. В такте Х3 включается привод главного насоса. После его в такте Х4 при работающем насосе производится включение привода задвижки. В этом состоянии система находится весь следующий такт Х5. Такт Х6 является основным тактом работы насоса при открытой задвижке. Такт Х7 является режимом работы насоса при аварии, при котором закрывается задвижка и выключается привод насоса, после чего система переходит к начальному состоянию.
Далее на основе таблицы 5 строим граф алгоритма управления по выше изложенной методике. Общий вид этого графа представлен на Рис.12.
шахтного водоотлива, который представлен на Рис.12.
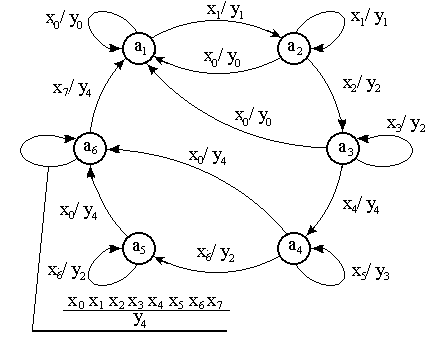
Рис.12. Граф переходов состояний системы управления шахтного водоотлива.
Этот граф имеет шесть вершин устойчивых состояний, на каждой из которых имеется петля циклового ожидания события, среди которых :
х0/у0 – (а1) ожидание нажатия кнопки пуск;
х1/у1 – (а2) ожидание окончания заливки насоса;
х3/у2 – (а3) ожидание окончания набора производительности насоса;
х5/у3 – (а4) ожидание окончания переключения задвижки (на открытие);
х6/у2 – (а5 ) работы насоса в нормальном режиме и ожидание окончания
этого режима;
(х0 х1 х2 х3 х4 х5 х6 х7)/у4 – (а6) ожидание окончания переключения
задвижки (на закрытие).
На основе этого графа строим алгоритм автоматической работа насоса