

5.1.Характеристика дискретного автомата.
Дискретный автомат – это абстрактное управляющее устройство дискретного действия с некоторой постоянной структурой. Наглядно дискретный автомат можно представить как некоторый материальный объект (прямоугольник или ящик (рис.6)), на входе которого последовательно появляются импульсные входные сигналы, в результате действия которых последовательно меняется внутреннее состояние этого автомата, а на его выходе так же последовательно возникают соответствующие выходные сигналы, являющиеся результатом управления.
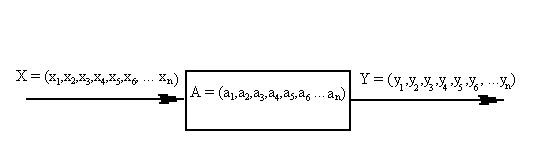
Рис.6 Структурная схема дискретного автомата
Совокупность всех входных сигналов дискретного автомата называется его входным алфавитом. Пусть в нашем случае этот алфавит задается следующей совокупностью символов:
X = {x1,x2,x3,x4,x5,x6, ... xn} |
(1) |
Совокупность всех выходных сигналов дискретного автомата называется его выходным алфавитом. В нашем случае этот алфавит задается следующей совокупностью символов:
Y = {y1,y2,y3,y4,y5,y6, ... yn} |
(2) |
Совокупность всех сигналов внутренних состояний дискретного автомата называется алфавитом его внутренних состояний. Пусть в нашем случае этот алфавит задается совокупностью следующих символов:
A = {a1,a2,a3,a4,a5,a6, ... an} |
(3) |
Промежуток времени между двумя последовательными состояниями дискретного автомата называется его рабочим таком. В момент смены такта меняется как внутреннее состояние автомата, так и величина сигнала на его выходе.
Если продолжительность такта определяется только длительностью входного сигнала, то такой режим работы дискретного автомата называется асинхронным. Если продолжительность такта определяется внешним источником (генератором тактовых импульсов), то такой режим работы дискретного автомата называется синхронным. Если такт входного сигнала формируется автоматом, а такт его внутреннего состояния внешним источником, то такой режим работы дискретного автомата называется согласованным.
5.2.Формальные языки описания дискретных автоматов.
Для описания работы дискретного автомата используются следующие языковые средства:
Таблицы переходов (функции δ);
Таблицы выходов(функции λ);
Графы переходов;
Граф - схемы алгоритмов;
Логические схемы алгоритмов.
5.2.1.Таблица переходов (функция δ)
Внутренне состояние дискретного автомата в конкретный момент времени описывается табличной функцией, смысловое содержание которой представлено в табл. 1.
Таблица 1
|
а1 |
а2 |
а3 |
а4 |
Смысл этой таблицы состоит в том, что некоторый дискретный автомат последовательно за четыре такта получает на свой вход сигналы: Х1;Х2;Х3;Х4. |
Х1 |
а1 |
а3 |
- |
а1 |
|
Х2 |
- |
а1 |
а1 |
а2 |
|
Х3 |
а4 |
- |
а2 |
а3 |
|
Х4 |
- |
- |
- |
а2 |
Этот дискретный автомат может произвольно принимать четыре возможных внутренних состояния: а1,а2,а3,а4. Согласно этой таблице при действии сигнала Х1 автомат из состояния а1 остается в этом же состоянии, но из состояния а2 переходит в состояние а3 , а из состояния а4 возвращается в состояние а1. В этом такте состояние а3 автомата безразлично, т. к. из него возможен переход в любое другое состояние. Согласно этой таблице аналогично объясняются переходы состояний автомата в последующих тактах.